



1.总体方案的选择和确定
新型轮腿式机器人采用三角步态行走,因此可把6条腿分为两组,身体一侧的前腿、后腿与另一侧的中间腿为一组,两组腿交替摆动与支撑,使机身一直处于相对平稳的状态。
通过查阅相关资料可知,功能型轮腿式机器人的运动原理较为简单,把电动机的功率及转速引出来分别传送到两组腿上,使其同步即可。因此,设计出以下几种方案:
1)方案一:将两组腿错开180°布置,用一个电动机带动,通过蜗杆蜗轮、同步带、锥齿轮等传动装置进行动力传递,实现两组腿的运行。
2)方案二:选用两个电动机分别对两组腿进行单独控制,同样需要同步带等传动机构来实现三角步态的运行。
3)方案三:选用六个电动机对每一个腿进行单独控制,这样可省去传动装置部分,直接由电动机带动腿运转。
比较以上三个方案:方案一只选择了一个电动机,能很好地实现两组腿之间的同步问题。但传动装置太多,必须加大箱体才能装载所有零件,同时两组腿之间被相对“固定”成180°布置,只有一个旋转自由度,这样一来使机器人灵活性不够,只能单纯地完成直线行进,无法实现转弯等功能。方案二在方案一的基础上有所改进,能分别控制两组腿的不同运动,自由度数为2,但方案一中存在的问题仍没有得到有效的解决。方案三中采用六个电动机进行控制,机器人有6个旋转自由度,腿与腿之间的同步不易满足,但由于省去了传动装置部分,大大节省了机体内的空间。同时,由于六条腿相对独立,通过控制电动机间的转速差,可进一步实现原地转弯、行进中转弯、四足甚至多足同时着地等动作,使机器人的运动更为灵活多变,更能适应恶劣的环境。另一方面,考虑到这种新型轮腿式机器人的主要特点是可高速行进,用于完成侦查等任务,对各腿同步的要求并不高,因此,选用第三种方案进行设计。
2.结构设计
采用Pro/E三维建模软件对新型轮腿式机器人的机械结构进行设计造型。新型轮腿式机器人的基本结构主要包括躯体、腿部和驱动装置。按照Pro/E建模的规则,使用各种适当的建模方法(拉伸、旋转、扫描、镜像等),对机器人的各部分结构进行造型。
(1)躯体造型设计 新型轮腿式机器人的躯体采用框架式结构,其三维实体模型和实物分别如图3-4和图3-5所示。
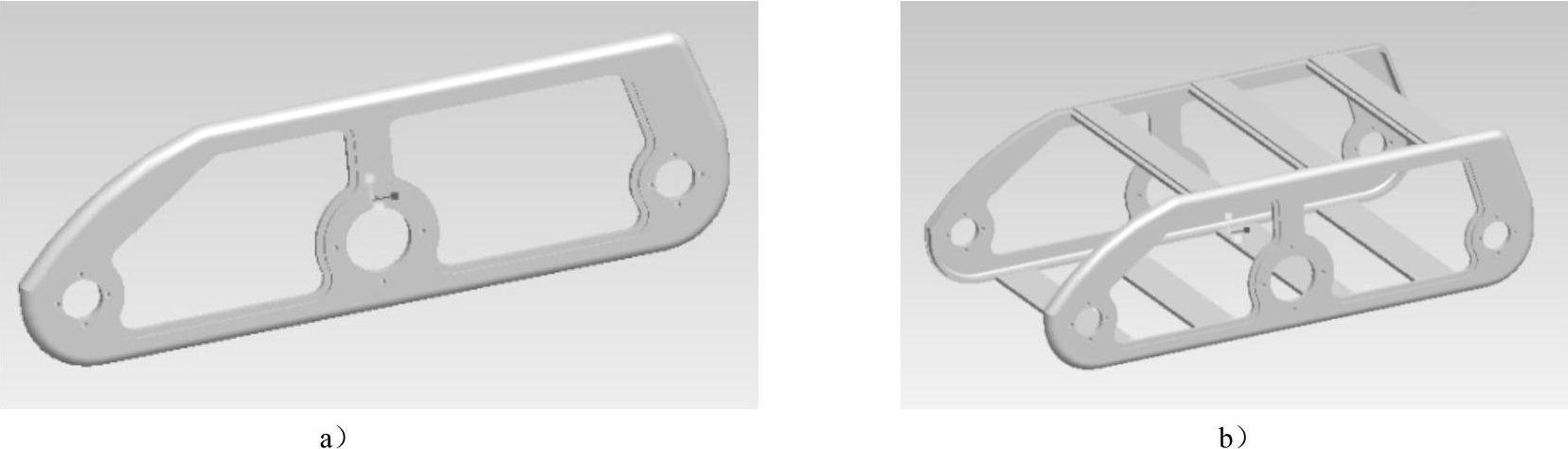
图3-4 新型轮腿式机器人躯体的三维实体模型
a)侧板模型 b)躯体整体模型

图3-5 新型轮腿式机器人躯体实物图
(2)腿部造型设计 新型轮腿式机器人腿部的三维实体模型和实物分别如图3-6和图3-7所示。如图3-6a所示,机器人腿部由两个单足和联轴器组成。两个单足分别呈180°对称安装在联轴器的两侧,用螺钉加以固定。单足的具体形状如图3-6b所示,之所以将机器人的足部设计成弧形,主要是弧形足部具有以下优势:①与直杆结构相比,弧形结构在机器人从“卧”到“站”的过程中,受力点更接近电动机回转轴,如图3-8所示,因此电动机所需的扭矩较小,减小了电动机的负担,同时增大了电动机选择的范围;②比起直杆结构弧形结构的触地面积更大,防滑性能更为优越;③在遇到复杂地质条件的地形时,例如石缝、滩涂等,直杆式足部容易陷入其中,使得机器人进退困难,而弧形足部却能大大降低这种风险。
(3)驱动装置造型 新型轮腿式机器人的驱动装置由电动机和行星齿轮减速器构成,其三维实体造型如图3-9所示。

图3-6 新型轮腿式机器人腿部的三维实体模型
a)腿部整体模型 b)足部模型(https://www.xing528.com)

图3-7 新型轮腿式机器人腿部实物图
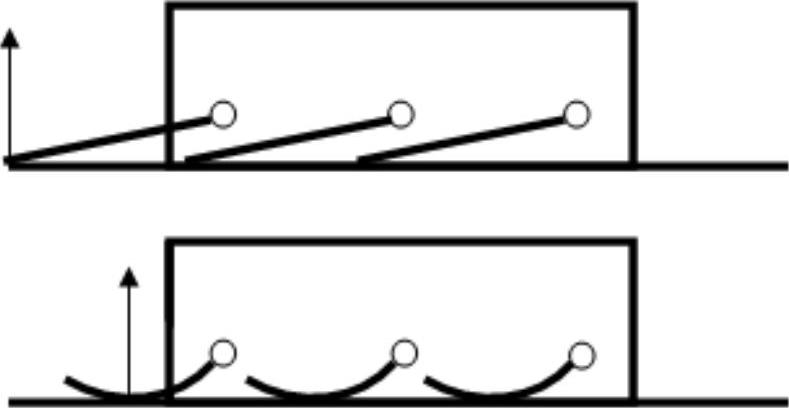
图3-8 机器人由“卧”到“站”足部受力图
(4)驱动装置造型 新型轮腿式机器人的驱动装置由电动机和行星齿轮减速器构成,其三维实体造型如图3-9所示。
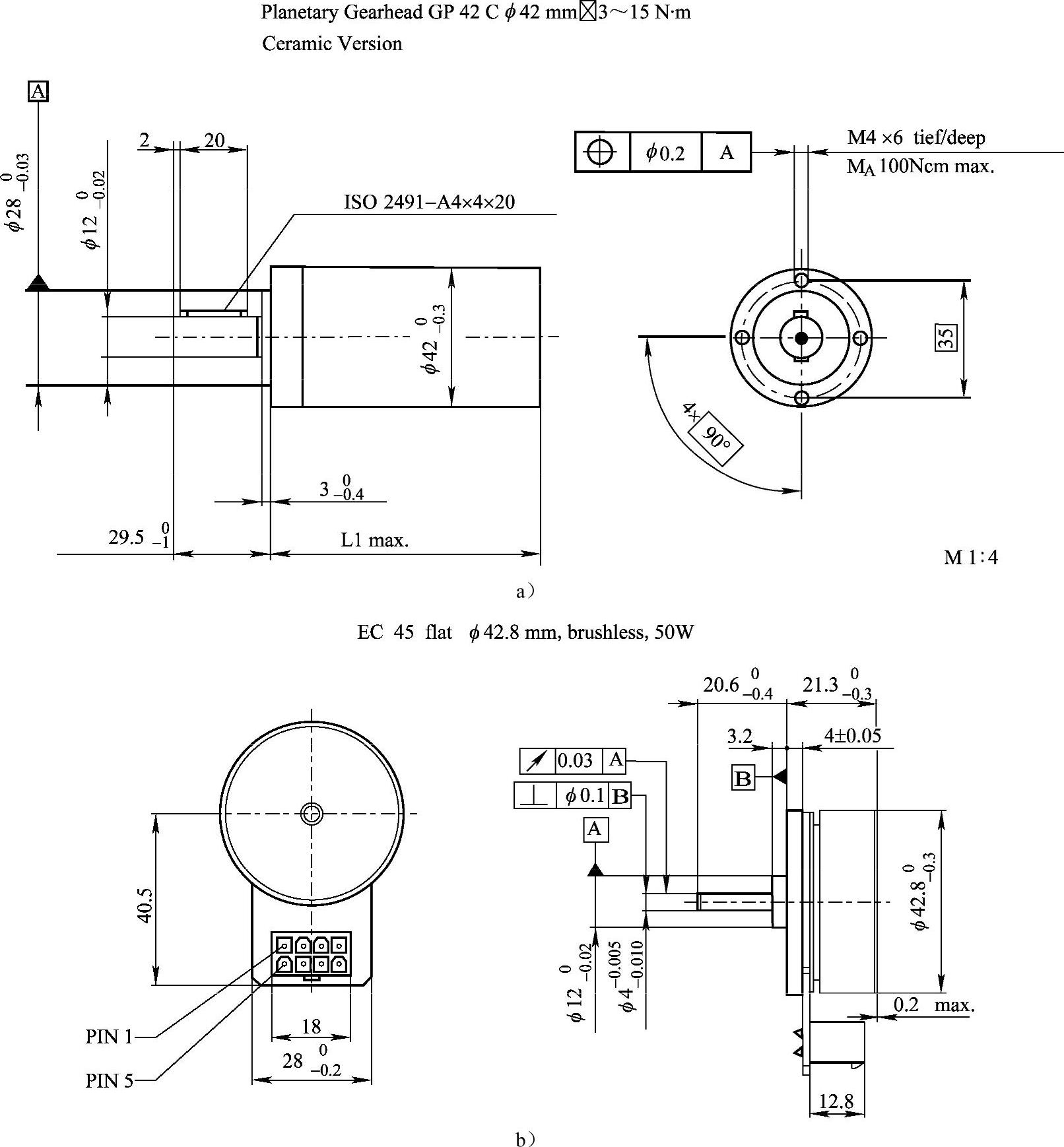
图3-9 驱动装置三维实体造型
a)GP 42C行星齿轮尺寸 b)EC 45盘式电动机尺寸
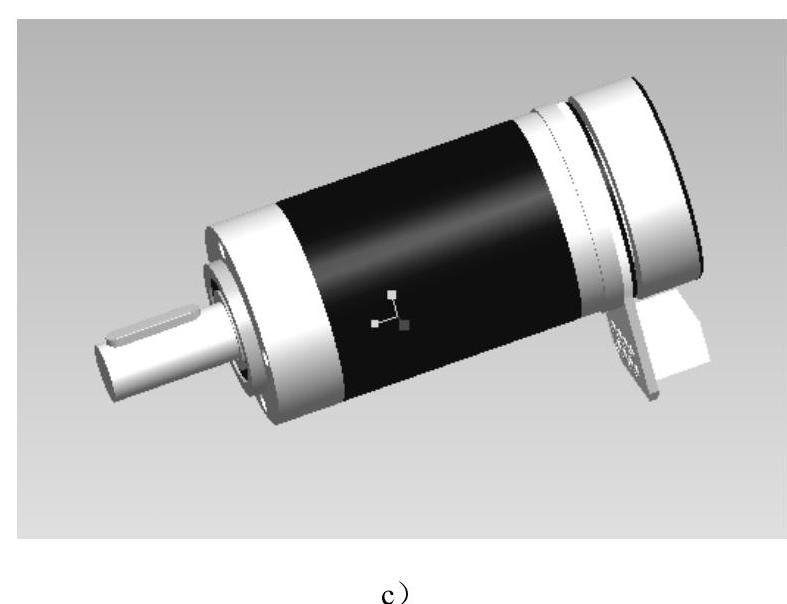
图3-9 驱动装置三维实体造型(续)
c)电动机+减速器模型
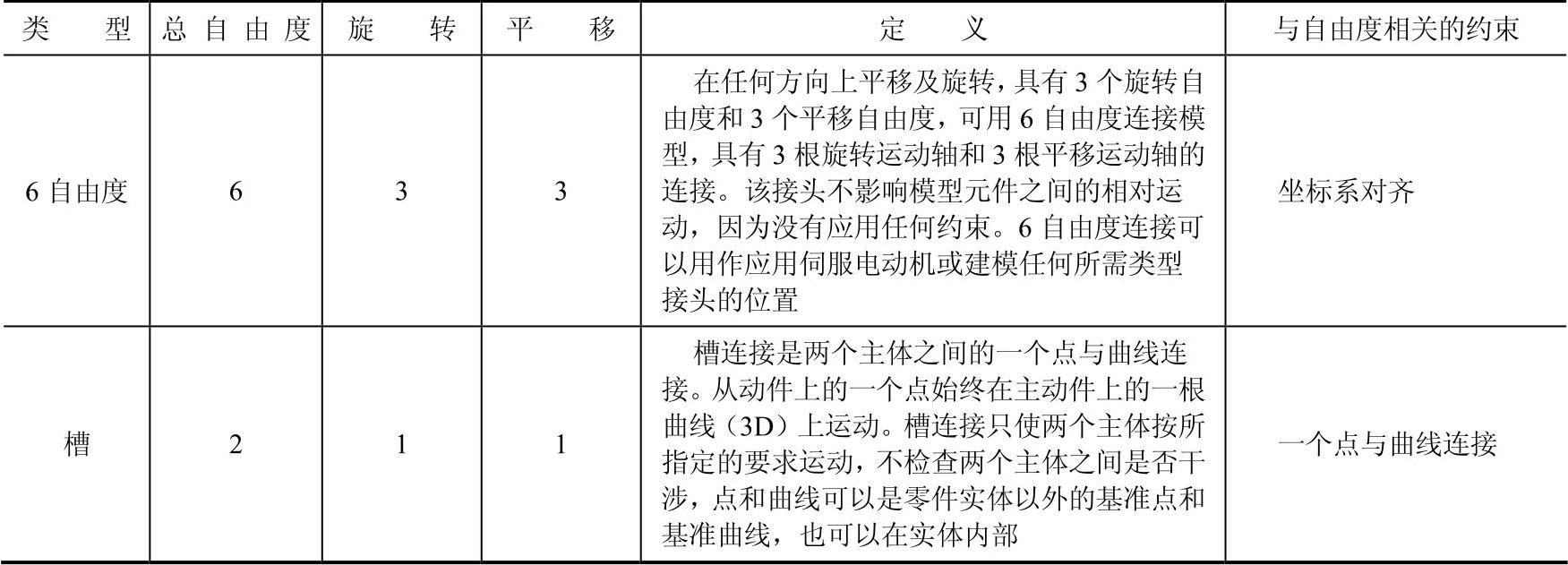
(5)整体装配 当所有零部件的建模都完成之后,则对新型轮腿式机器人的整体模型进行组装。对于需要用螺栓固定的零件,均采用刚性连接类型,如躯体的侧板与连接板之间、减速器与电动机之间等;对于只有一个旋转自由度的零件,采用销钉连接方式。各种连接类型及其自由度见表3-1。
表3-1 连接类型及其自由度

(续)
经过装配,新型轮腿式机器人的整体模型如图3-10所示。机器人躯体两侧各有三条腿,呈对称分布,中间腿的安装位置比前后腿都外突一段距离,在减小机体前后端横向结构尺寸的同时,可有效避免前、中、后三条腿之间的互相干涉,使机器人的运动步态组合更为方便。
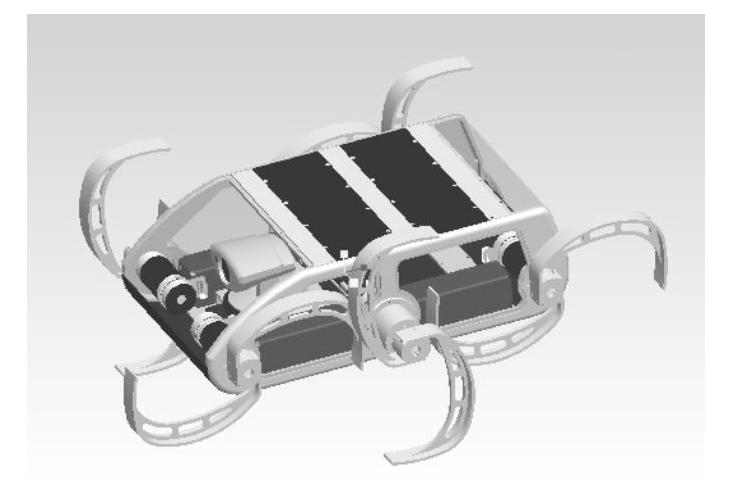
图3-10 新型轮腿式机器人的整体模型
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。