



轮式运动被认为是效率最高的运动形式,但它只适用于平坦路面,对于复杂的地形,腿式运动比轮式运动要优越得多。研究表明:当多足动物穿过复杂地形时,会对遇到的障碍物进行自我调节,这是轮式机器人无法比拟的。比如蟑螂,其速度之快令人惊叹。蟑螂每跨一步只需50ms,速度可达20cm/s,可以爬过自身高度3倍的障碍物而无需减速。从对蟑螂的运动过程的研究中,我们可以总结出:多足机器人腿与腿之间是各自独立的,能实现每条腿的不同动作,其运动方式具有较好的机动性,使机器人更能适应不平的地面;由于腿之间的相互独立,因此即使地面不平坦,也能靠控制腿的协调动作来保持机身平稳,起到防振作用;多足机器人在不平或者松软的地面上运动时也能以较高速度行走,比起轮式机器人的能量消耗也少得多。
鉴于蟑螂运动的独特优点,近年来仿生蟑螂机器人在机器人学界得到了高度重视和快速发展。从仿生蟑螂机器人的发展历程来看,具有代表性的仿生蟑螂机器人大致可分为以下三种类型:
1)第一种为Robot系列蟑螂机器人,如图3-1所示。该系列机器人是由美国凯斯西储大学(Case Western Reserve University)研制的,其外形为仿生设计。RobotⅢ的各条腿的自由度分布并不均匀,前腿为5个,中腿为4个,后腿为3个,共24个自由度,其驱动方式为气压驱动,可获得较大的爆发力。RobotⅣ是在RobotⅢ的基础上研制而成的,它的驱动方式采用了人工肌肉,具有更好的仿生效果。
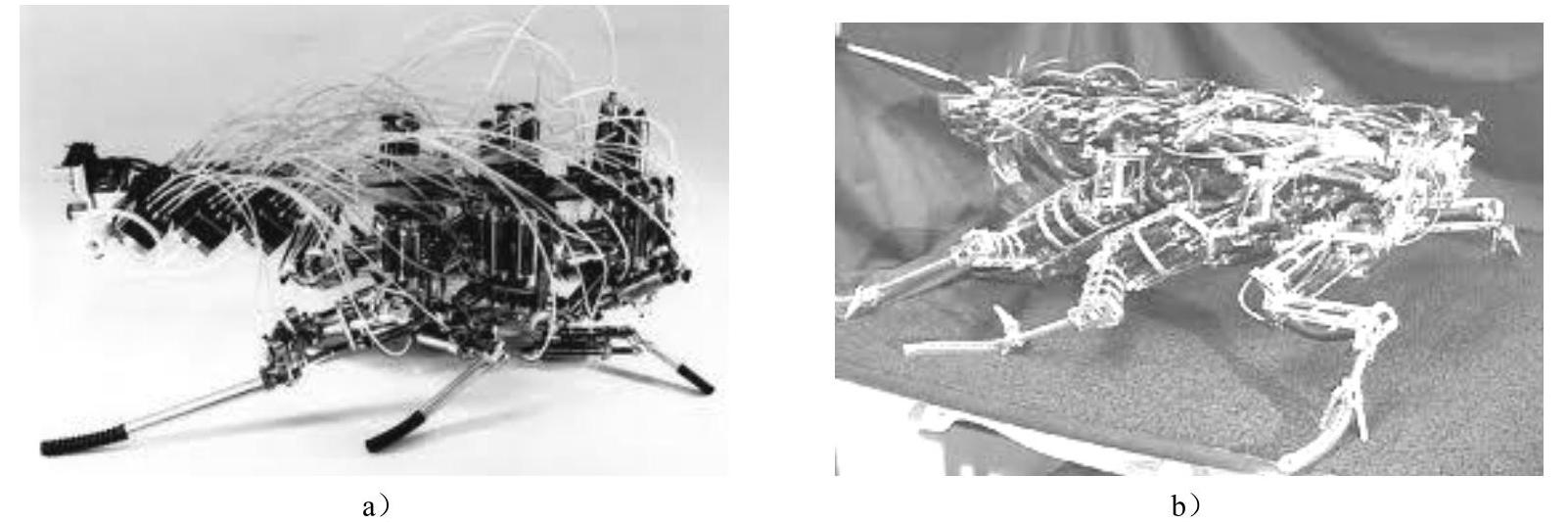
图3-1 Robot系列蟑螂机器人
a)RobotⅢ b)RobotⅣ
2)第二种为Whegs系列蟑螂机器人,如图3-2所示,其外形设计不是简单的机械仿生,而是抽象出蟑螂运动的特点进行功能模拟,仍由美国凯斯西储大学(Case Western Reserve University)研制。该系列机器人的每条腿都只有一个旋转自由度以进行轮式运动,每条腿是一个相互间隔120°的三轮副结构,是一种基于生物学原理抽象而成的6-DOF功能新型轮腿式机器人。
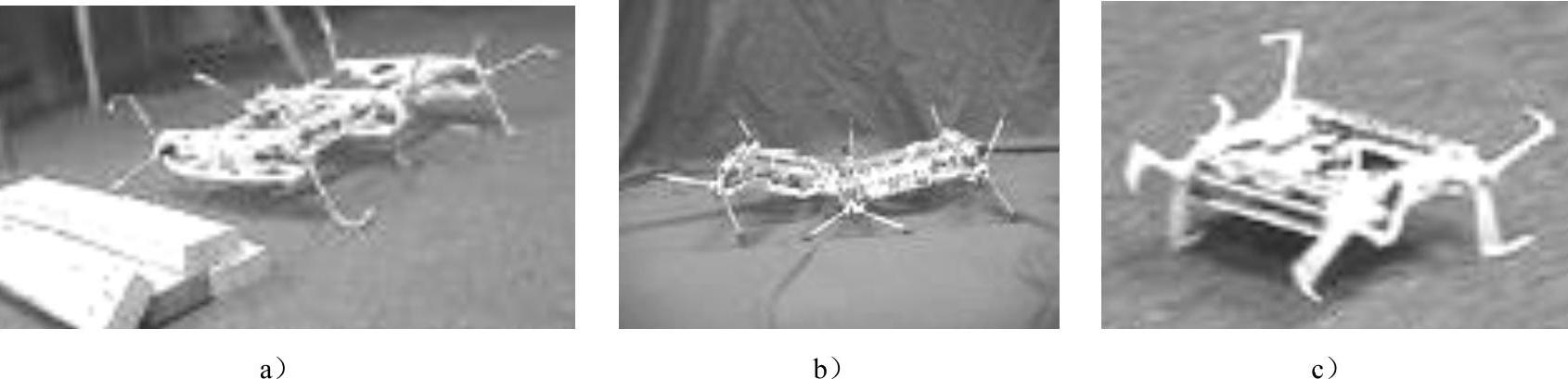
图3-2 Whegs系列蟑螂机器人
a)WhegsⅠ b)Whegs Ⅱ c)WhegsⅢ
3)第三种为RHex系列蟑螂机器人,如图3-3所示。该系列机器人和Whegs系列蟑螂机器人一样,也是一种从生物学原理中抽象出来的6-DOF功能新型轮腿式机器人,由美国密执安大学(University of Michigan)、加利福尼亚大学伯克利分校(UC Berkeley)和加拿大麦吉尔大学(McGILL University)共同研制而成。
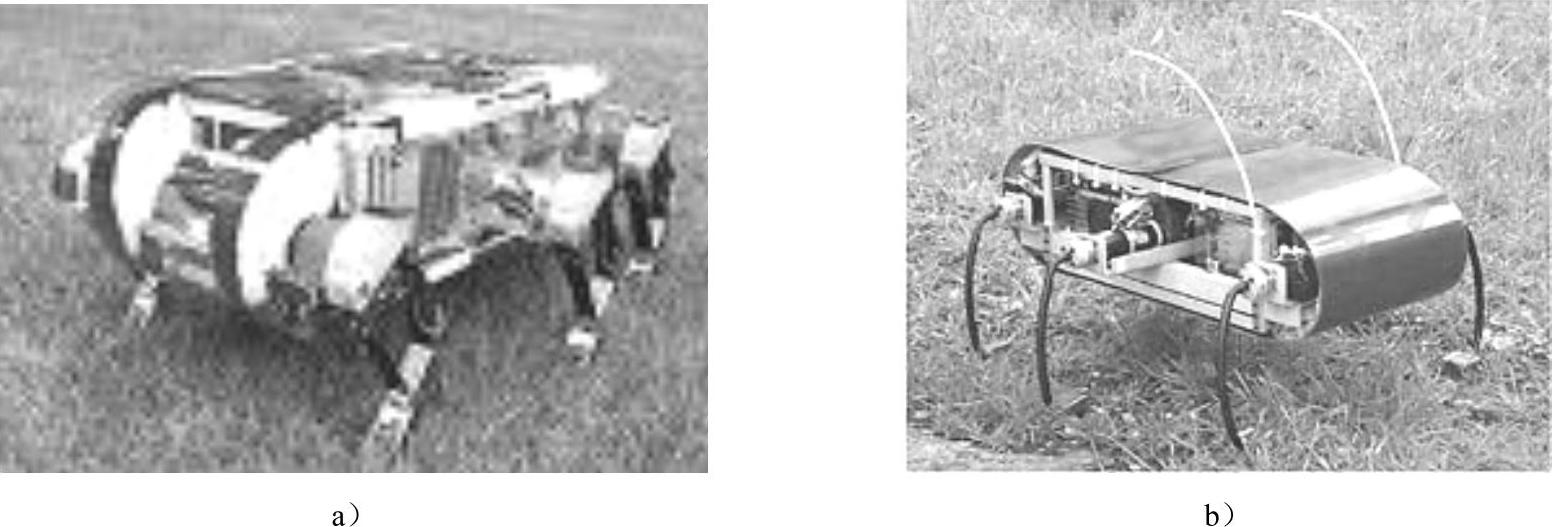
图3-3 RHex系列蟑螂机器人(https://www.xing528.com)
a)早期样机 b)近期样机
生物学研究表明:蟑螂虽然运动敏捷,但其神经系统却非常简单,这说明蟑螂在运动过程中,其中枢神经并不一直处于工作状态,其各腿的运动受控制器的自主控制。因此轮腿式机器人的控制系统一般采用主从分布式控制结构。脑级主控制器依据规划的任务要求,为各腿级控制器分配任务,腿级主控制器依据所需执行的任务要求向它的从控制器发布命令。上下级控制器之间进行信息交互,从而实现智能运动控制。
当前,世界范围内仿生机器人的研究热点主要有以下几个方面。
(1)运动机理仿生 运动仿生是仿生机器人研发的前提,而进行运动仿生的关键在于对运动机理的建模。在具体研究过程中,应首先根据研究对象的具体技术需求,有选择地研究某些生物的结构与运动机理,借助于高速摄影机或录像设备,结合解剖学、生理学和力学等学科的相关知识,建立所需运动的生物模型;在此基础上进行数学分析和抽象,提取出内部的关联函数,建立仿生数学模型;最后,利用各种机械、电子等方法和手段,根据抽象出的数学模型加工出仿生的软、硬件模型。
生物原型是仿生机器人的研究基础,软硬件模型是仿生机器人的研究目的,而数学模型则是两者之间必不可少的桥梁。只有借助于数学模型才能从本质上深刻地认识生物的运动机理,从而不仅模仿自然界中已经存在的两足、四足、六足及多足行走方式,同时还可以创造出自然界中不存在的一足、三足等行走模式及轮腿式运动等。
(2)控制机理仿生 控制仿生是仿生机器人研发的基础。要适应复杂多变的工作环境,仿生机器人必须具备强大的导航、定位、控制等能力;要实现多个机器人间的无隙配合,仿生机器人必须具备良好的群体协调控制能力;要解决纷繁复杂的任务,完成自身的协调、完善及进化,仿生机器人必须具备精确开放的系统控制能力。如何设计该核心控制模块与网络以完成自适应、群控制、类进化等这一系列问题,已经成为仿生机器人研发过程中的首要难题。
(3)信息感知仿生 感知仿生是仿生机器人研发的核心。为了适应未知工作环境,代替人完成危险、单调和困难的工作,机器人必须具备包括视觉、听觉、嗅觉、接近觉、触觉等多重感觉在内的强大的感知能力。单纯的感测信号并不复杂,重要的是理解信号所包含的有价值的信息,因此,人们必须全面运用各种时域、频域的分析算法和智能处理工具,充分融合各传感器的信息,相互补充,才能从复杂的环境噪声中迅速地提取出所需的正确的敏感信息,并克服信息冗余与冲突,提高反应的迅速性和确保决策的科学性。
(4)能量代谢仿生 能量仿生是仿生机器人研发的关键。生物的能量转换效率最高可达100%,肌肉把化学能转变为机械能的效率也接近50%,远远超过目前各种工程机械。肌肉还可以自我维护,长期使用。因此,要缩短能量转换过程,提高能量转换效率,建立易于维护的代谢系统,就必须重新回到生物原型,研究模仿生物直接把化学能转换成机械能的能量转换过程。
(5)材料合成仿生 材料仿生是仿生机器人研发的重要部分。许多仿生材料具有无机材料所不可比拟的特性,如良好的生物相容性与力学相容性,并且生物合成材料技能高超、方法简单,所以研究目的的一方面在于学习生物的合成材料方法,生产出高性能材料,另一方面是为了制造有机元器件。因此仿生机器人的建立与最终实现并不仅仅依赖于机、电、液、光等无机元器件,还应结合和利用仿生材料所制造的有机元器件。
本研究的目的在于研制一种能够在不同地形条件下高速机动行驶并具有一定越障能力的微型新型轮腿式机器人。该机器人具有结构紧凑、机动灵活、运动能力强、适应能力好等优点,可以在复杂地形条件下执行特殊使命。
新型轮腿式机器人的研究在发达国家也才不过十几年的历程,而我们国家更只是处于刚起步的阶段。因此,开展这一课题的研究,对于提高我国在该领域的研究水平,赶上国际先进水平具有重要意义。另外,对于日益增加的自然或人为疏忽所酿成的灾害(例如地震、雪灾、矿难等),尤其是在危险或人类无法到达的场合中,新型轮腿式机器人都有很好的应用前景,能够大大提高救援的效率,保障人民的生命安全。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。