



新型特种搜救机器人目标定位于灾难救援,而在地震、火灾等灾难现场,该机器人的长时间持续作业的能力已成为衡量系统性能的一个重要指标。结合新型特种搜救机器人系统野外作业的特点,可以采取以下两种技术措施来提高持续作业时间:①增加机器人的电池容量;②降低机器人的能量消耗。虽然方法①简单易行,但是由于机器人的体积限制,增加电池必然会导致机器人重心上移及重量增加,运动机能下降,对于在灾难现场非结构环境的高机动性要求来说很不利。而通过对能源管理技术进行研究,降低功耗,达到在系统所配能源不变的前提下极大限度地延长作业时间,成为最终研究方向。
根据对机器人电源系统的研究,采用动态电源管理超时算法对所设计的电源管理系统进行控制。通过对整个系统进行了动态建模与数字仿真,并通过分析在有无超时算法的系统消耗,验证了加入超时算法后可以明显降低系统的功耗。
1.电源系统整体框架
图2-24所示为新型特种搜救机器人电源系统框架图。
新型搜救机器人的电源系统由锂电池组、电源管理系统和用电设备三部分组成。电源管理系统在电池组和用电设备之间起到中间环节的作用,一是进行升压和降压使输出能够匹配用电设备;二是通过合理设置能够改善系统整体功耗水平。
2.动态电源管理技术研究
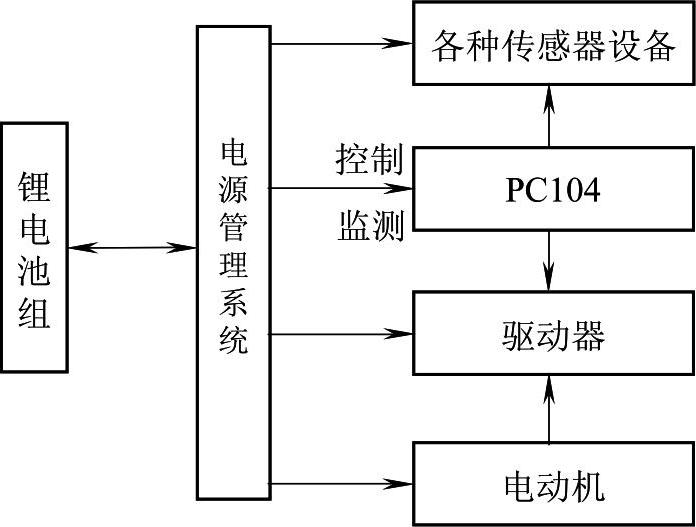
图2-24 新型特种搜救机器人电源系统框架图
动态电源管理是动态地分配系统资源,以最少的元件或元件最小工作量的低耗能状态,来完成系统任务的一种降低功耗的设计方法。对于电源管理实施时间的判断,要用到多种预测方法,根据历史的工作量预测即将到来的工作量,决定是否转换工作状态和何时转换。这就是动态电源管理技术的核心所在——动态电源管理方法。
动态电源管理技术适用的基本前提是,系统元件在工作时间内有着不相同的工作量。大多数的系统都具有此种情况。另一个前提是,可以在一定程度上确信能够预知系统、元件的工作量的波动性。这样才有转换耗能状态的可能,并且在对工作量的观察和预知的时间内,系统不可以消耗过多的能量。
最普通、最简单的动态电源管理方式是关闭系统中处于空闲状态的组件,使其进入节能状态,但将系统某一组件从关闭到唤醒会有时间上的一定延迟,并且在此过程中还会产生相应的能量消耗,如图2-25所示,所以只有当用电设备在关闭时所节省的能量大于或等于因状态转换所额外消耗的能量时(式(2-3)),才可以对该组件断电,否则不宜转换设备的供电状况。
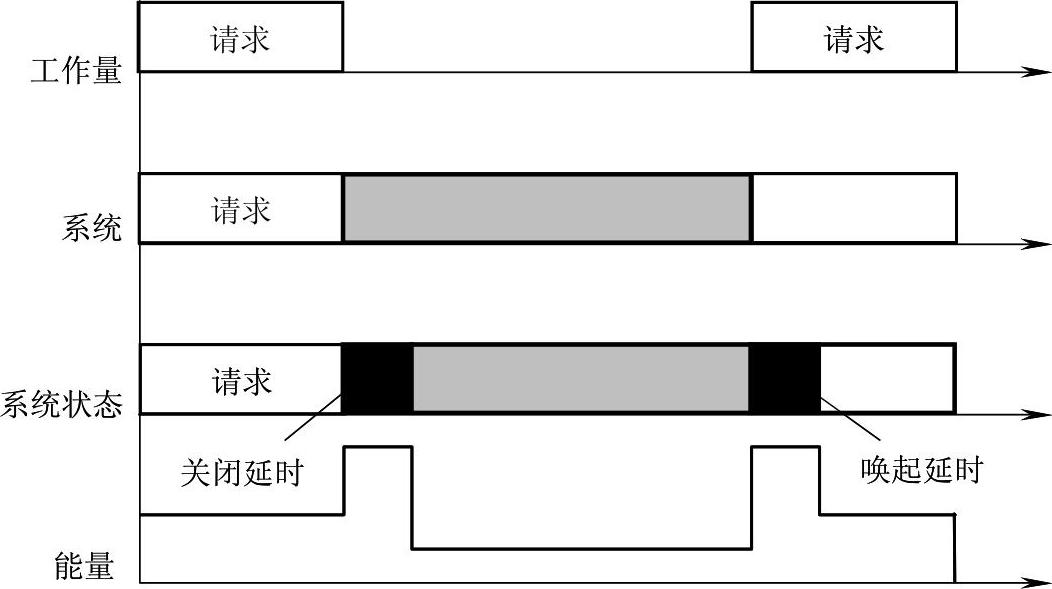
图2-25 系统组件由开启到关闭时能量变化示意图
Pidletidle≥Ec+Eo (2-3)
式中,Pidle为系统组件处于空闲状态时的能耗;tidle为系统组件的空闲时间;Ec为系统组件由空闲状态到断电关闭时的能量消耗;Eo为系统组件由关闭到唤醒时的能量消耗。
由于对大多数真实系统而言,即将输入的信号往往是难以确定的,所以动态电源管理的决策通常建立在对未来空闲时间的不确定预知的基础之上。所有的基于预知的动态电源管理技术的基本原理是探索过去工作量的历史和即将发生的工作量之间的相互关系,来对未来事件进行可靠的预知。这种预知存在着两种情况:一为预知不足,即预知空闲时间比实际空闲时间短;二为预知过度,即预知空闲时间比实际空闲时间长。预测空闲时间不足将不能达到节能的效果,而预知过度又将造成能量的浪费。在此情况下,可考虑采用固定超时法来妥善解决上述问题。固定超时法是一种最普遍的电源管理预知法,它是用过去的空闲时间作为观察样本对象来预知当前空闲时段的总持续时间。该方法的要点如下:空闲时间开始,计时器开始计时,超过固定超时时间tBE而系统中组件仍处于空闲时,则电源管理系统停止对该系统组件供电,直到接收到外界供电请求,才标志着空闲状态的结束。采用这种方法,系统节能的效果主要取决于tBE的选择:固定超时过长则将引起预知不足,不能有效地节省能量,相当多的能量浪费在等待超时上,在机器人技术领域,通常可取tBE=tidle。固定超时法具有简单、实用的特点,而且系统组件可能的空闲时间越长,应用这种算法的效果就越好,系统节能的幅度也就越大。
3.搜救机器人系统节能设计
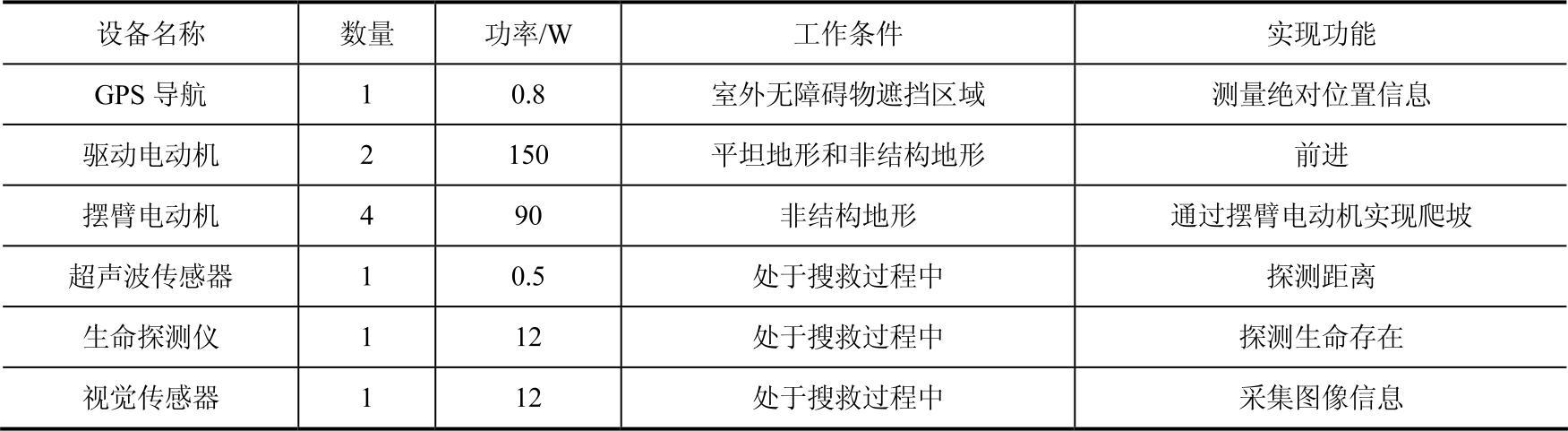
新型特种搜救机器人采用多种传感器,摄像头和六个电动机组成了用电设备组,这些用电设备之间在工作对象、工作机理、工作特性和工作环境等方面具有很强的互补性,因此这个用电设备组就存在当处于不同环境中只有部分组件有效工作执行任务的情况,只要能合理设计各用电设备的工作时间和空闲时间,便可使得搜救机器人的用电设备具有很大的节能空间。表2-2为搜救机器人系统能源使用情况一览表。
表2-2 搜救机器人系统能源使用情况一览表
 (https://www.xing528.com)
(https://www.xing528.com)
搜救机器人的用电设备中,主要是驱动电动机需要保持时刻使用状态,而与其他设备构成互补。GPS导航由于其能耗极小,可不纳入电源管理的范围。所以在通往搜救的路上,其只需要驱动电动机运动就可以,而其他设备就可以采用超时算法对其进行控制,实现节能的效果。
4.电源管理系统的软硬件设计
经过上述分析,当得知某组件不具备工作条件时,通过设定的超时算法进行分析,若达到了可以节省能量的阈值,就关闭该组件,否则电源管理系统不对其进行断电处理。对应的电源管理系统硬件构成如图2-26所示。电源系统管理流程图如图2-27所示。在该管理模块中,可以通过对继电器驱动电路写1或写0控制继电器的断开或闭合,这就使传感器系统组件实现了按需关闭和唤醒。
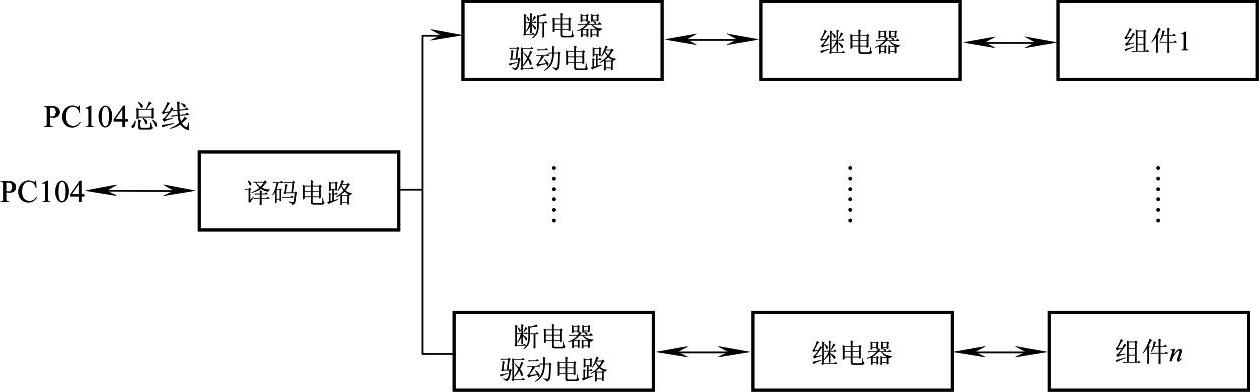
图2-26 电源管理系统硬件构成
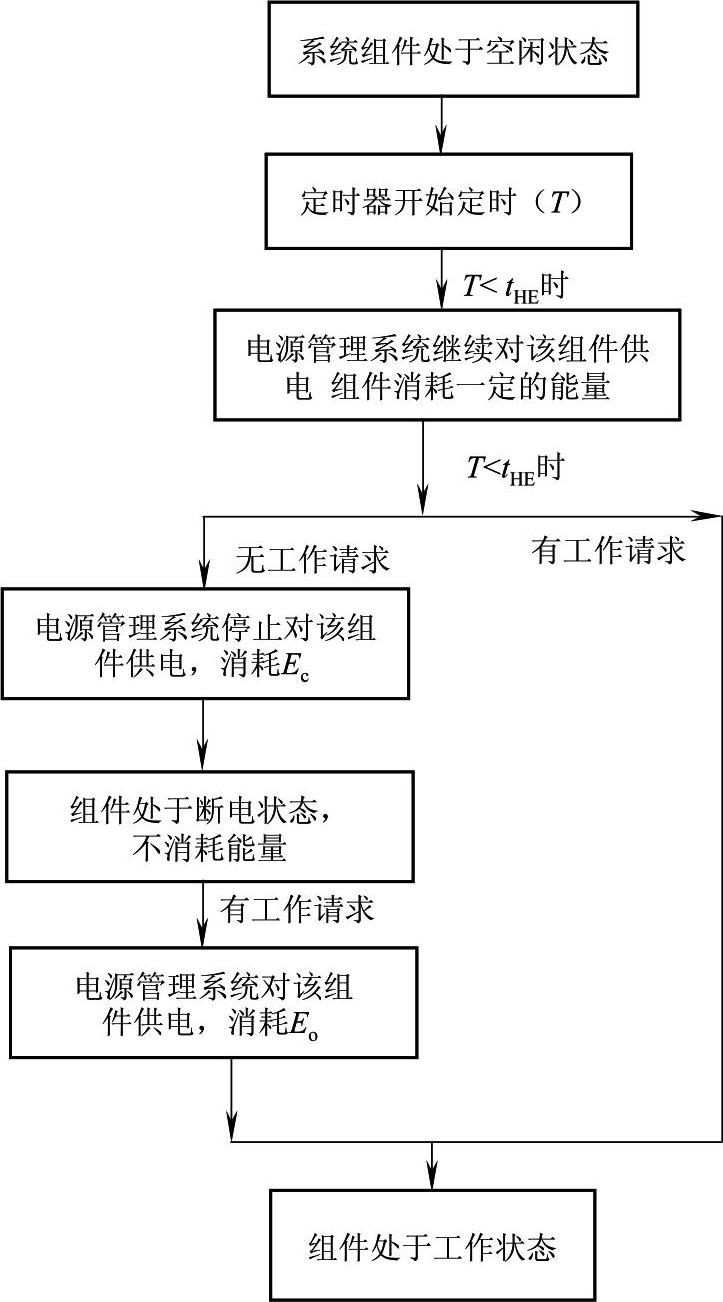
图2-27 电源系统管理流程图
5.电源系统电路设计
图2-28所示为模块电源设计的电路图,输入电路里有熔断器防止电流过大烧毁电源,还有稳压器D1。稳压和滤波电路保证了电源模块本身能够稳定运行。同时考虑到因为电动机的功率很大,输电线路上的压降也必然增大,故采用图2-28中所示的放射性接法,用一对粗导线将电源引出,降低了电路的压降,从而保证了电源供电的稳定和效率。
图2-29所示为12V输入用电设备电路图。
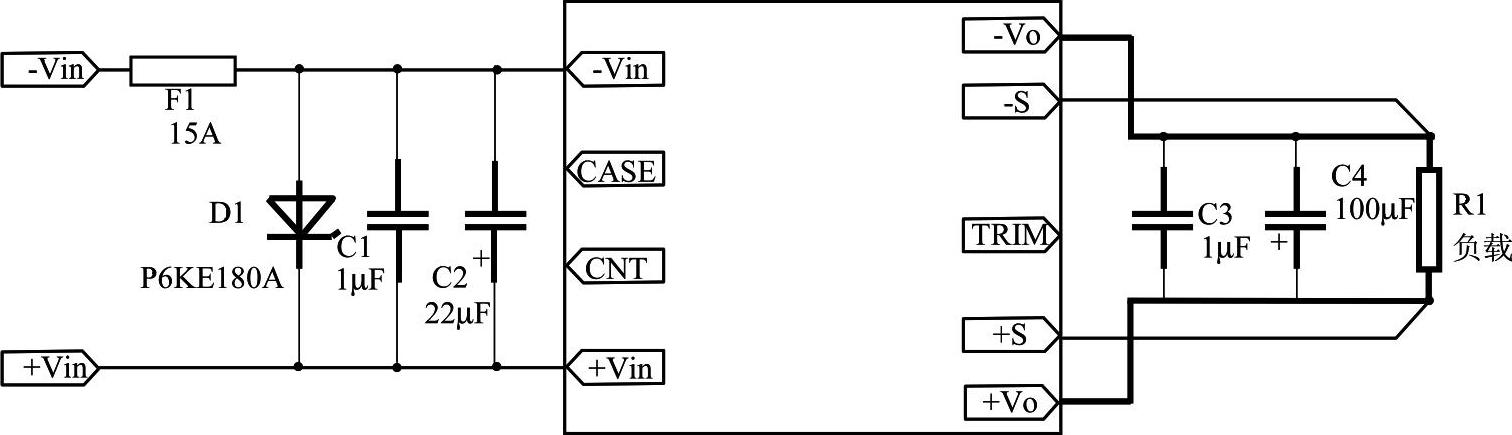
图2-28 模块电源设计的电路图
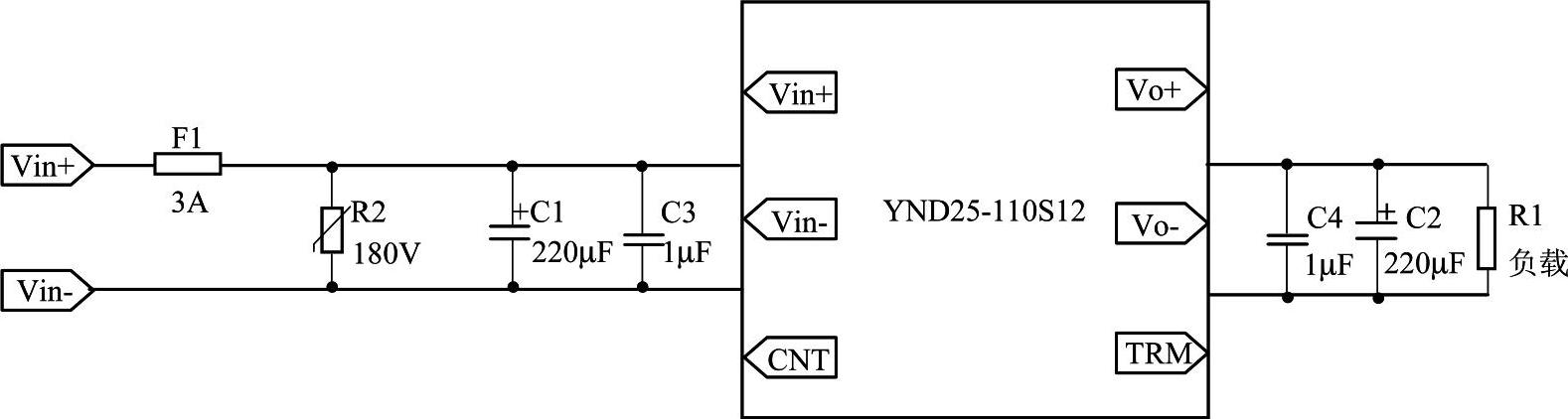
图2-29 12V输入用电设备电路图
图2-30所示为主控系统供电图,该电路主要是负责给超声波传感器、生命探测仪、视觉传感器或附加设备的供电,经过测试能够满足性能指标。
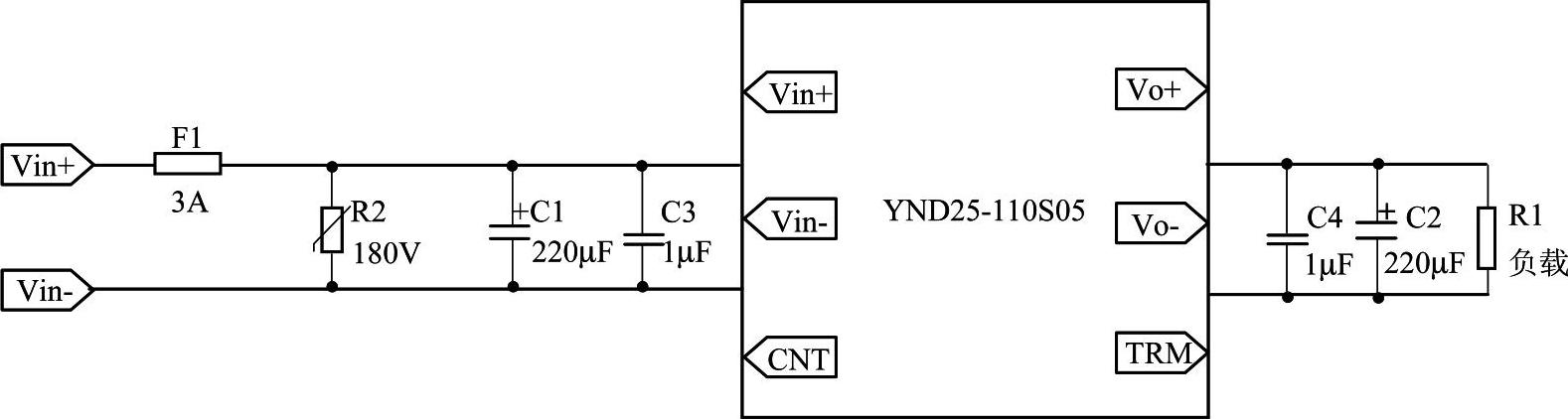
图2-30 主控系统供电图
6.电源系统总结
针对搜救机器人的电源管理技术,采用了动态电源管理技术超时算法对其用电设备组进行控制,通过理论的研究发现,超时算法会对系统节能有重要的贡献,在任何复杂环境中都能长时间稳定作业,体现出了优良的特性,极大地提高了搜救机器人整体的性能指标,同时体现了节能环保的理念。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。