



1.机器人系统总体设计
系统总体设计技术是新型特种搜救机器人的灵魂,它决定着整个研究工作的成败及研究成果水平的高低,其核心是功能与结构的合理组合、性能与效果的协调统一,由此才会引发新型特种搜救机器人系统设计思想、研究方法、功能原理、结构特点、设计技巧、技术途径及测试手段等的全面创新。
2.机器人机构设计
机构设计是新型搜救机器人研究的基础,机构设计的优劣直接影响到机器人的灵活性和机动性。机器人设计有四个可灵活摆动的履带臂,机身完全被行走履带包覆,使得机器人在通过坎坷崎岖地面时行走自如,克服了传统履带式移动机器人由于底盘与地面磕碰而不能移动的缺点,提高了机器人的攀附越障能力。通过链传动及电动机左右交错布放的方式节省了有限的机体空间;行走履带采用阶梯状齿形,使得机器人可以在不同质地的路面上充分发挥其机动能力。新型特种搜救机器人实物样机如图2-8所示。

图2-8 新型特种搜救机器人实物样机
3.运动控制技术
针对不同任务和作业需要,搜救机器人有时需要高速推进以快速通过危险区,有时需要攀爬越障,有时需要低速巡航,因而必须研究其在不同作业环境中的运动控制技术,包括多电动机协调控制技术、电动机功率调节技术和运动方式切换技术等。
为使新型特种搜救机器人体现出较强的协作性,高效地完成任务,采用基于目标任务的分层递阶控制体系结构作为新型搜救机器人的控制体系结构,如图2-9所示。该体系结构以任务为目标,以协调合作为核心,以无线通信为纽带,主要包括:决策层、通信层、协调层和执行层。决策层使机器人系统具有一定程度的自主性,可将外部环境变化或操作者指令所引起的系统内部响应经过分析和判断,形成对整个机器人系统的控制决策;通信层主要负责实施实时、高效、无差错地与控制中心进行通信。协调层是将所执行任务进行分解,并对任务执行情况进行反馈。执行层通过驱动各个执行部件来实现机器人的运动和动作,从而准确高效地完成任务。(https://www.xing528.com)
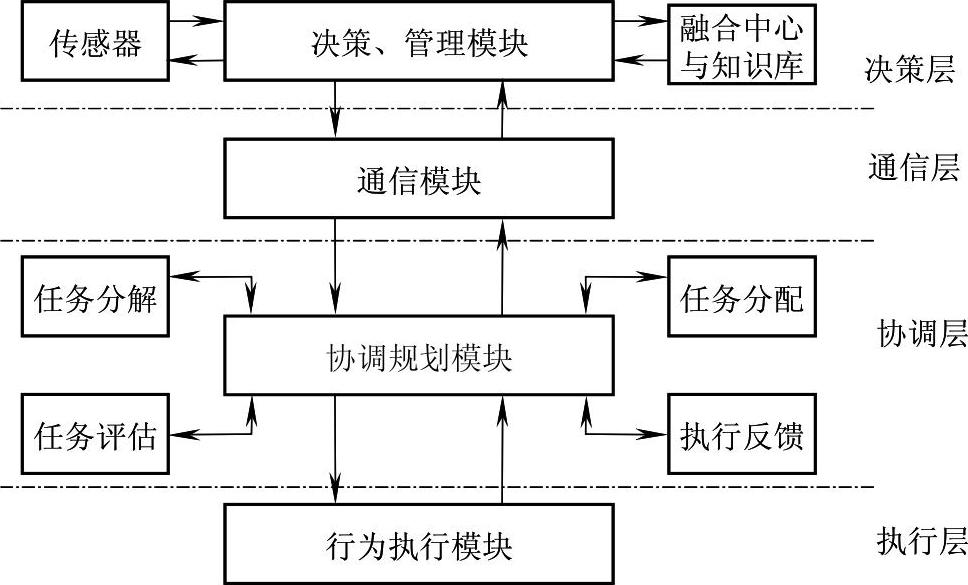
图2-9 基于目标任务的分层递阶控制体系结构
4.传感探测与通信技术
传感探测与通信技术是新型特种搜救机器人的关键技术,准确地探测被困幸存人员的位置并将周围环境信息传送给营救控制指挥中心是搜救机器人完成协助营救任务的前提。新型特种搜救机器人拟采用可见光/红外线复合探测器,即使在照度不高的环境中也能清晰地采集到图像。机器人配用的高精度生命探测仪用于确定被困幸存人员的位置信息,如图2-10所示。上述信息通过无线网桥实时地传输到营救控制中心。
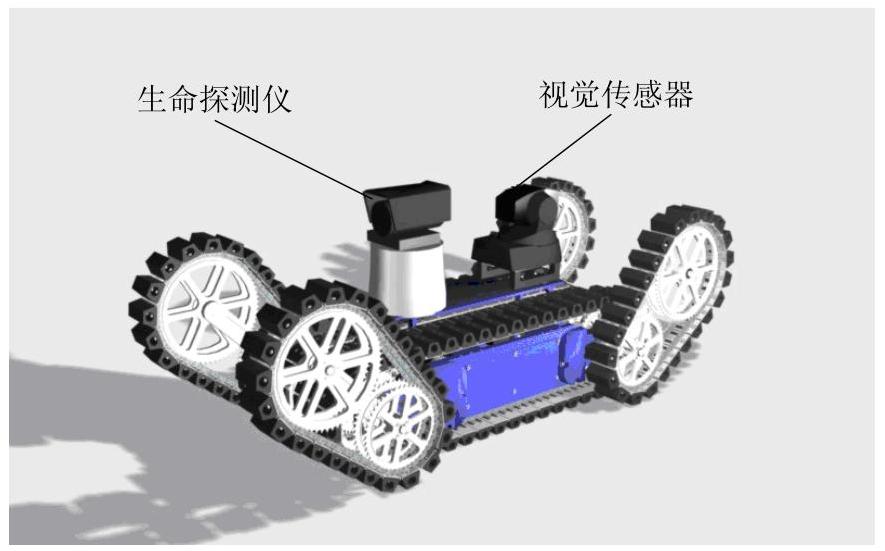
图2-10 装配有传感器的特种搜救机器人
5.能源管理技术
新型特种搜救机器人一般在非结构环境中作业,作业时间已成为衡量系统性能的一个重要指标。结合新型特种搜救机器人系统的特点,对能源管理技术进行研究,可降低功耗,在系统所配能源不变的前提下,极大限度地延长作业时间。具体的研究细节将在2.3小节中介绍。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。