



搜救机器人是将机械设计技术、智能控制技术、传感探测技术、营救行动技术和灾难学等多学科的知识有机地融合,是当代机器人学研究中一个富有挑战性的新领域。新型搜救机器人的研制成功将极大地提高救援的效率和成功率,减少救援过程中不必要的伤亡,具有广阔的应用前景和市场价值。同时,研发搜救机器人所涉及的设计理念、关键技术、实验方法对相关项目的研发工作也具有一定的借鉴意义。
1995年日本神户-大阪的大地震及其之后发生在美国俄克拉荷马州的阿尔弗德联邦大楼爆炸案揭开了搜救机器人技术研究的序幕。
2001年美国9·11事件后,美国机器人辅助救援中心和其他一些单位的救援机器人参与了此次救援行动。它们是:Foster-Miller公司的SOLEM机器人(图2-1)、TOLON机器人(图2-2)。机器人在此次救援行动中取得了成功。同时在救援中也暴露出了很多问题,例如控制方式不可靠、防水性不好、视野狭窄等。
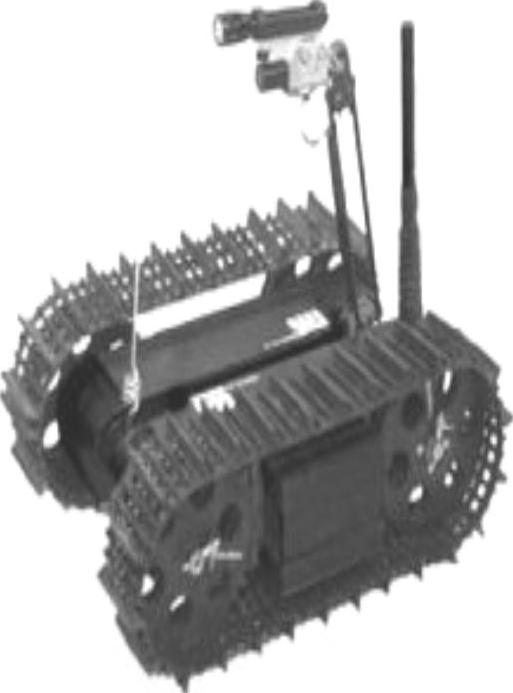
图2-1 SOLEM机器人
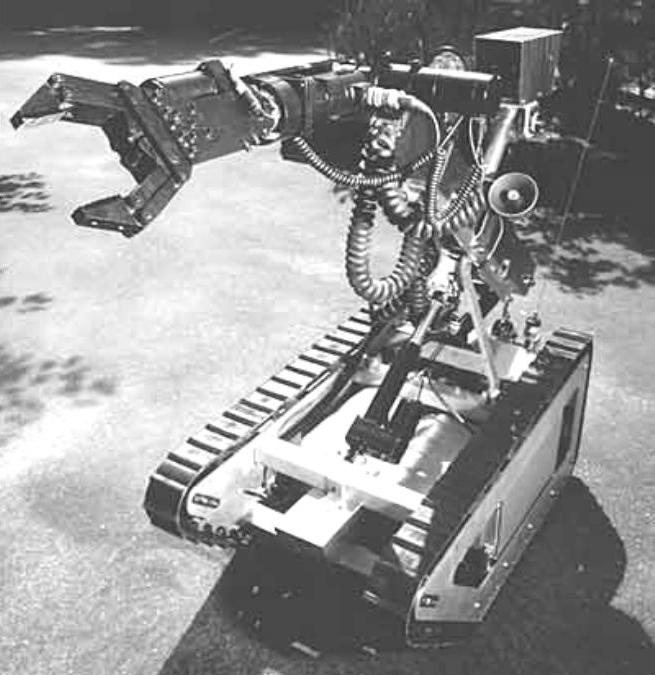
图2-2 TOLON机器人
加拿大Inuktun公司设计了一款用于搜救功能的履带式变结构机器人Micro-VGTV,如图2-3所示。设计者在机器上装配了录像机、侦听设备和热感应设备,可以发现幸存者的位置。Micro-VGTV形状能在运行期间改变。当在它们最低的结构形式时,它们相似于传统的履带式搜救机器人。当它们以最高的几何结构升起时,外形就像一个三角形,仍然可维持着整体的平稳和坚固。
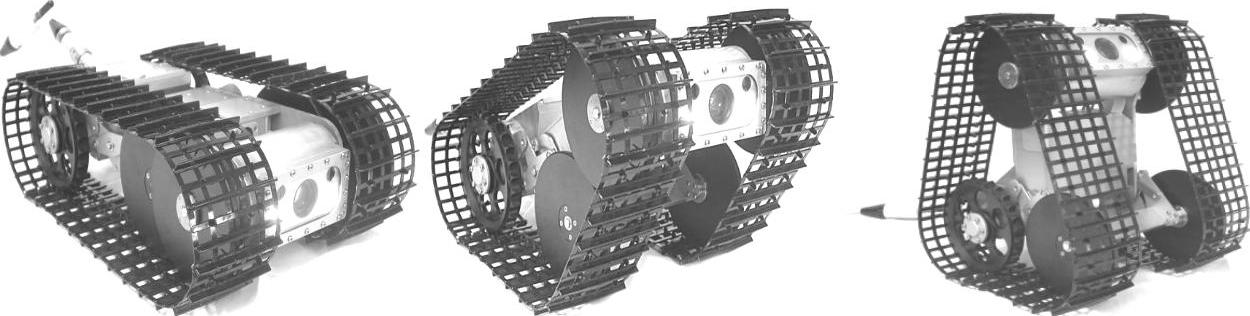
图2-3 Micro-VGTV机器人变形的过程
日本三菱重工公司研发出一款名为“灾难助手”的机器人,如图2-4所示。这款机器人能探测出毒性气体和放射性物质,还能够从废墟中寻觅遇难者。该机器人还有良好的自平衡性,可以攀爬楼梯。
 (https://www.xing528.com)
(https://www.xing528.com)
图2-4 “灾难助手”机器人
日本SGI和日本电气通信大学智能机械工程系松野研究室于2003年成功联合开发出蛇形救助机器人“KOHGA”,如图2-5所示。这种蛇形机器人为8节车体相连的蛇形设计,可在因灾害而倒塌的建筑物中四处移动。机器人的前后配备有CCD相机,可监控自身的状态,可通过无线和有线两种方式操作。图2-6所示的三节型蛇形搜救机器人是由日本东京技术学院研制的用于在地震后的房屋废墟里寻找幸存者的机器人,该机器人分为3节,用6个履带爬行,采用遥控式操作。

图2-5 蛇形救助机器人“KOHGA”
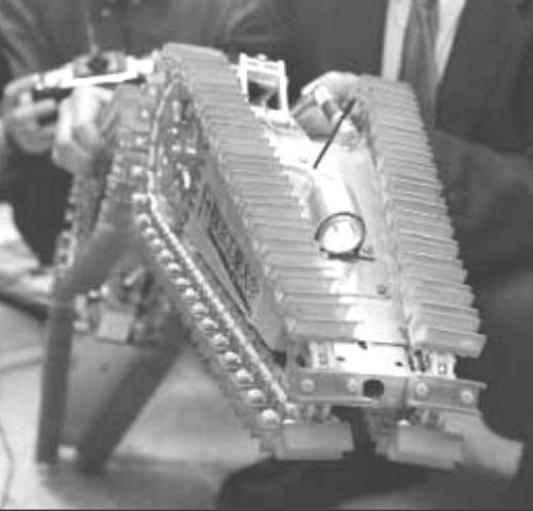
图2-6 三节型蛇形搜救机器人
图2-7所示为中国矿业大学研发的矿难搜救机器人。这款机器人能够深入事故矿井探测,并实时回传信息和图像,为救灾指挥人员提供重要的现场灾害信息。同时,机器人还能携带急救药品、食物、生命维持液和简易自救工具,以协助被困人员实施自救和逃生。
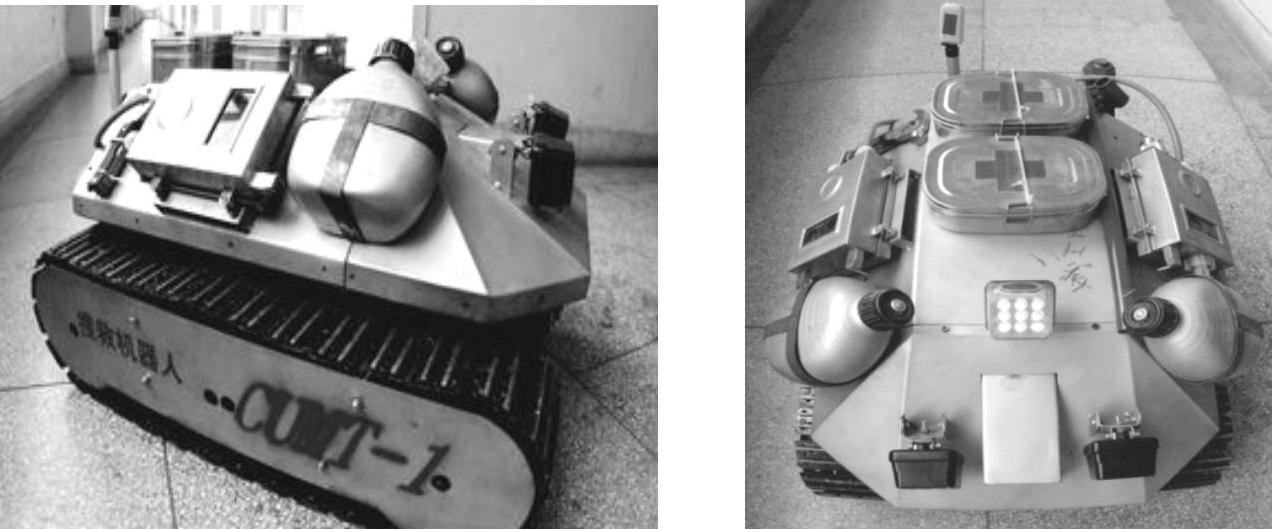
图2-7 矿难搜救机器人
综上所述,世界各国已经意识到搜救机器人及其相关技术的重要性,正在投入大量的人力、物力和财力进行相关研究,部分产品已走出实验室,投入使用,但从使用效果来看,也存在着性能不可靠、通信不及时、过分依赖执行人员操作等缺点。国内对搜救机器人的研究起步较晚,主要集中在少数高校和科研机构。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。