



1.控制系统总述
在该项目研究中,有以下几个控制对象:①车载系统大功率无刷直流电动机;②发射云台两自由度旋转步进电动机;③指令的无线传输。
机器人的总体结构分为作业端和遥控端,其原理图如图1-24和图1-25所示。
在作业端单板计算机选用研祥EC5-1711CLDNA搭建主控计算机系统。为实现机动平台的高效运动,车载平台运动控制系统执行元件采用美国克尔摩根公司的高性能AKM42J-ANCNR-00型大功率无刷直流电动机,并配备以色列的CELLO-15/200R型直流伺服电动机高性能驱动器。发射器云台采用低成本、控制方法简易的大转矩步进电动机。为保证通信传输的实时性和鲁棒性,无线通信装置采用美国Axelwave局域网专业公司生产的AX9000PE-30无线网桥及XA-212天线。在控制软件的编程中,MFC对界面的编程方便实用,符合人机交互的方便性原则。
机器人由操控者发送的指令进行控制,给定元件为控制终端的操控箱,执行元件为大功率无刷直流电动机和步进电动机,由于车载平台运动需要较高的控制精度,故需闭环控制,采用集成于直流伺服电动机内部的光电编码盘作测量元件,反馈到驱动控制器,以稳定电动机转速。鉴于防暴弹是定点发射、区域攻击,故步进电动机控制精度要求不高,采用开环控制,依据程序设定转速即可。控制对象为车载平台系统和防暴弹发射器,控制量为车载平台的转向及行驶速度、发射器云台的转动方位和转动速度。
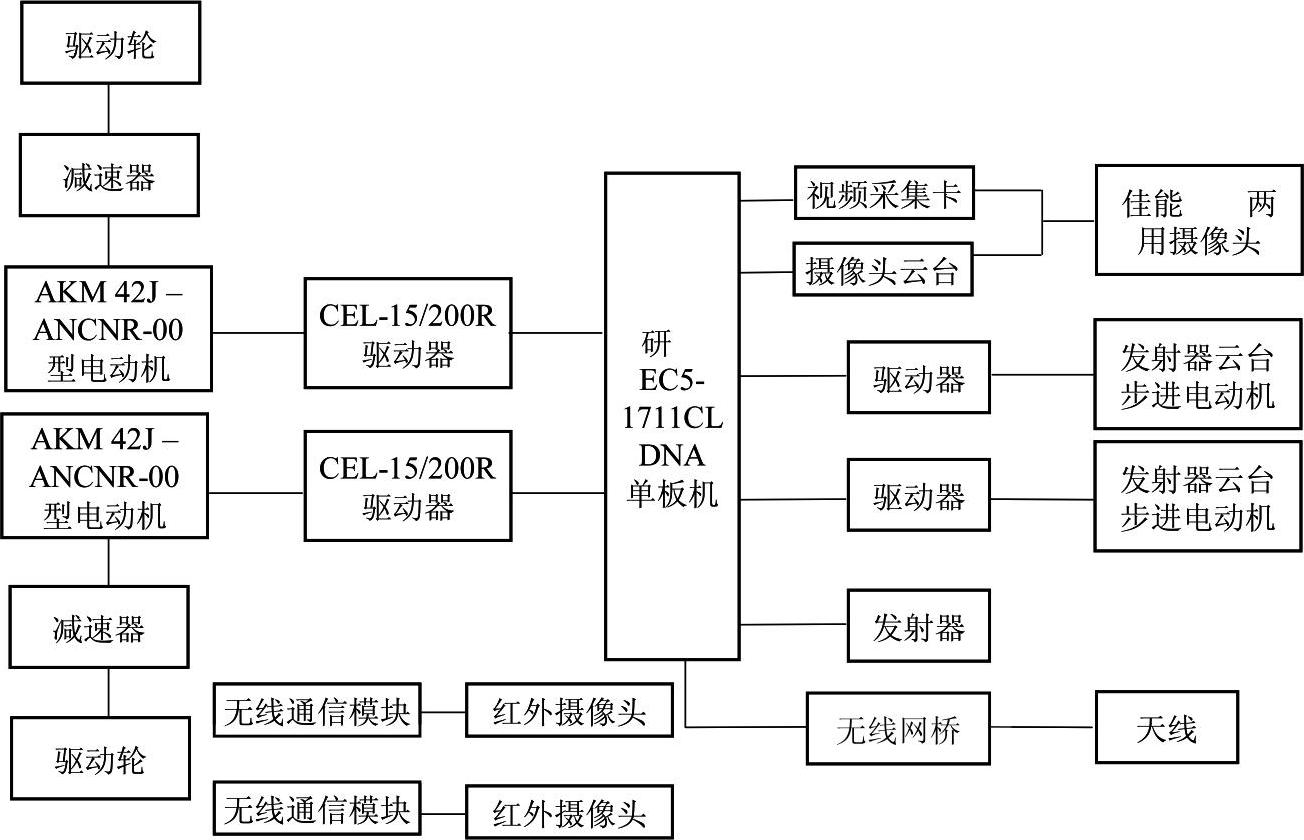
图1-24 机器人作业端原理图
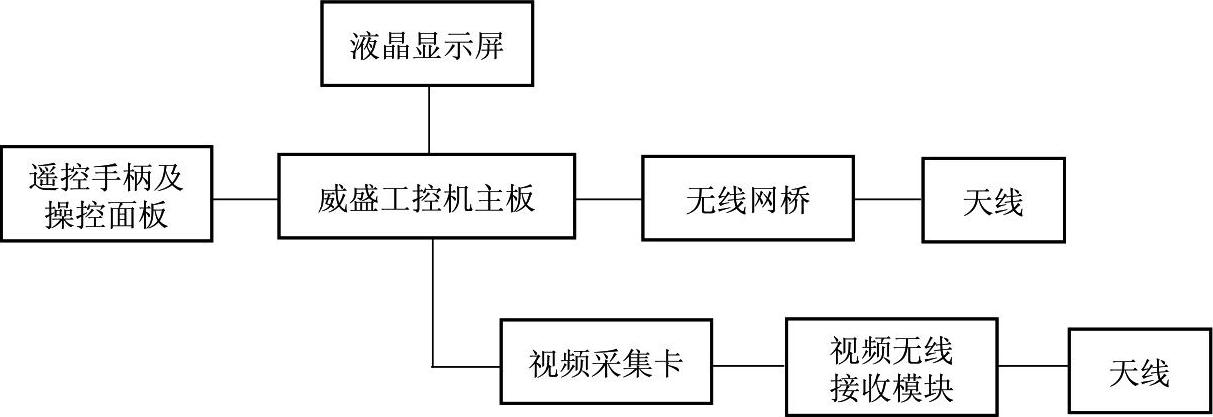
图1-25 机器人遥控端原理图
机器人的上位机和下位机均为单板机,控制通信接口较多,且安装调试方便。上位机接收操控者由遥控手柄和操控面板发送的指令,经无线通信系统将指令传送给下位机,下位机根据程序代码分析控制指令,确定操控者要求机器人完成的动作,并根据程序指令驱动两台大功率无刷直流电动机、两台步进电动机、大场景监测摄像头云台电动机进行运动,实现操作者的操作控制。视频图像显示采用无线视频收发模块完成,机器人视觉监测系统通过摄像头捕捉战场图像,并将图像通过视频无线发送模块实时传输给视频无线接收模块,图像信息经上位机处理,由液晶屏显示出来,实时监测战场环境,为操控者操控机器人提供依据。
2.控制与无线通信的硬件组成与装配
(1)作业端主控计算机 机器人运动控制系统和无线通信系统的硬件不仅需要满足功能需求,而且必须满足高性能、低功耗的使用要求。作业端主控计算机是车载平台控制系统的核心部分,其选型直接决定平台其他硬件的选择。
目前,多种类型的处理器芯片得到了广泛使用,例如早期出现的简单的单片机、20世纪90年代诞生的DSP、ARM及引领了CPU发展趋势的基于x86构架的Intel处理器。由于机器人多任务、多功能、多系统的特点,需要大量的接口电路、功能扩展插槽及高效稳定的计算机处理器,所以DSP、ARM等在简单嵌入式设备中普遍使用的处理器并不适合车载机动平台。在该控制系统中,作业端主控计算机选用研祥EC5-1711CLDNA单板搭建计算机系统。该单板机的性价比较高,性能稳定,且功能完备,能够满足机器人多任务、多系统的控制要求,其外观及接线图如图1-26所示。

图1-26 研祥EC5-1711CLDNA单板机外观及接线图
EC5-1711CLDNA单板机的主要参数如下:
1)总线类型:5.25″单板结构。
2)处理器:Pentium-M和Celoron-M系列低功耗CPU。
3)系统内存:一条200-针DDR333 SODIMM,支持最大1GB DDRRAM。
4)在板视频:Intel 855GME芯片整合,支持CRT+LVDS的“双显示”,最大64MB的动态显示内存共享。
5)在板LAN:Inte l82562 100M以太控制器,RJ-45接口。
6)IDE控制器:一个40针ATA100通道,支持两个EIDE设备。
7)多I/O接口:四个USB2.0接口、一个并口、四个RS-232、一个PS/2键盘/鼠标二合一接口、一个115Kbit/sIrDA接口;
8)数字I/O:4路数字输入,4路数字输出。
9)扩展总线:一个124针Mini-PCI扩展总线、一个标准PCI插槽扩展。
10)电源:标准20针ATX电源插座和4针AT电源接头,BIOS可自动识别电源。
11)外形尺寸:203mm×146mm。
(2)伺服电动机及其驱动设备 电动机一般分直流伺服电动机和交流伺服电动机,因该机器人要实现野外作战的要求,必须采用直流电池组供电,因此需要选用直流电动机,而直流电动机根据不同特点又可分为有刷直流电动机、无刷直流电动机、步进电动机和舵机。有刷直流电动机和无刷直流电动机的性能对比见表1-7。根据机器人实际作战条件和运行状况,要求电动机有较大功率、结构简单、控制方便,并且有较高的可靠性,不允许存在火花、噪声等问题,综合比较各种直流电动机的优缺点,选用无刷直流电动机。
表1-7 有刷直流电动机和无刷直流电动机的性能对比

为了满足机器人高性能、高功率的要求及严酷环境条件下作战任务的需要,综合比较国内外大功率无刷直流电动机及驱动设备的性能特点,选用美国Kollmorgen公司的AKM42J-ANCNR-00型无刷直流电动机并搭配以色列Elmo公司的CEL-15/200R驱动器和ABR090-040-S2-P2减速器,ABR090-040-S2-P2减速器的减速比为40:1。美国Kollmorgen的无刷直流电动机具有良好的性能:扭矩/惯量比高、转速高、无磨损、免维护、刚性高、运行平稳、位置精度高、调速范围宽、动态特性好。AKM42J-ANCNR-00型大功率无刷直流电动机如图1-27所示,电动机主要参数见表1-8。
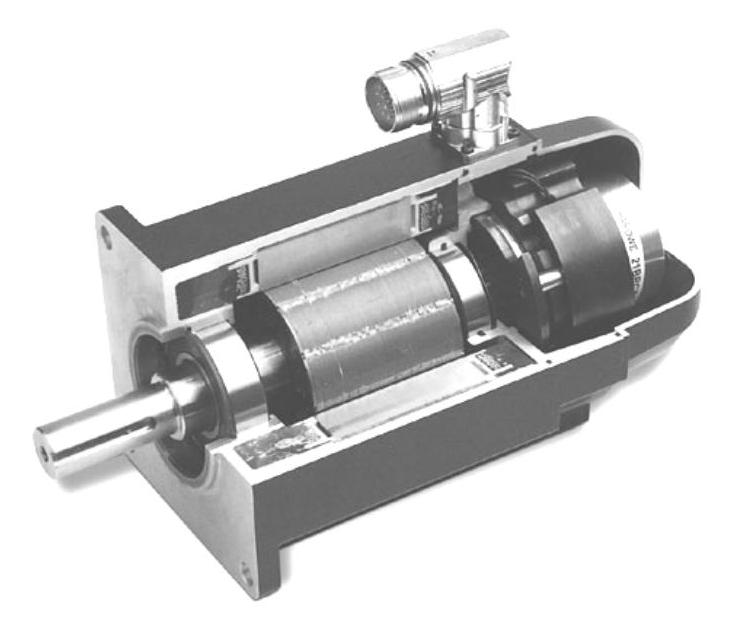
图1-27 AKM42J-ANCNR-00型大功率无刷直流电动机
表1-8 AKM42J-ANCNR-00型电动机主要参数

CEL-15/200R驱动器如图1-28所示,驱动器主要参数见表1-9。

图1-28 CEL-15/200R驱动器
表1-9 CEL-15/200R驱动器主要参数

从数据参数可知,驱动器的峰值电流为31.5A,电动机的堵转电流为33.7A,因此在机器人爬坡越障时能够发挥电动机的极限动力,使动力性能更加强劲,越野机动能力更加完备。此外,该驱动器配有可供控制人员开发用的API函数库,调用简单,控制方便,很适合VC++编程。
(3)发射器云台电动机及其驱动设备 因发射器质量较大,故需要选用大扭矩的电动机,但对电动机的控制精度要求不是很高,小于等于1°即可,且对运动速度的要求较低,在每分钟2~4转范围内即可。步进电动机一般用在中低速直接驱动的定位控制场合,而且具有无累积误差(精度为100%)的特点。伺服电动机一般用在高速、高动态、精密速度位置控制的场合。对于同场合使用的伺服电动机系统会比步进电动机系统贵2~5倍的价格。综合成本、控制方案的简易性、安全可靠性及实用性等各种因素,最终选用步进电动机。
在对步进电动机进行选型之前,首先计算云台所需的驱动力矩,计算流程图如图1-29所示。
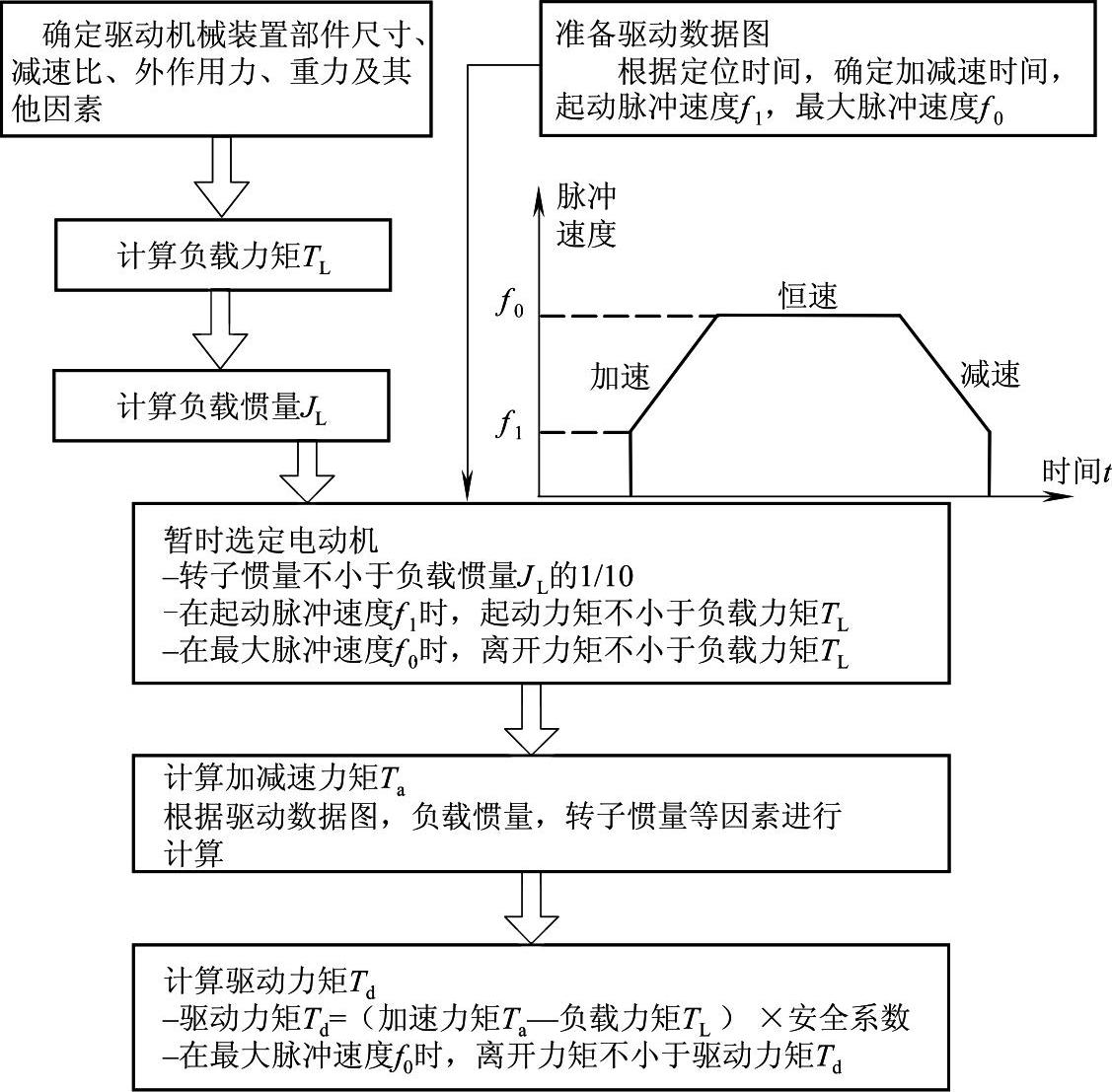
图1-29 计算步进电动机驱动力矩流程图
目前比较常用的步进电动机包括反应式步进电动机(VR)、永磁式步进电动机(PM)、混合式步进电动机(HB)和单相式步进电动机等。永磁式步进电动机一般为两相,转矩和体积较小,步进角一般为7.5°或15°;反应式步进电动机一般为三相,可实现大转矩输出,步进角一般为1.5°,但噪声和振动都很大。混合式步进电动机结合了永磁式和反应式的优点,应用最为广泛,故选用该类型的步进电动机。经市场调研,根据所计算出的驱动力矩,并结合电动机尺寸和可供给电流,选用上海先锋工控有限公司生产的87H7808型步进电动机,其外观如图1-30所示。
对于步进电动机驱动器的选型,选型原则非常简单,只要能保证满足步进电动机的使用即可,细分越大越好,于是选择了一个60V、5A、8细分的驱动器。选择的驱动器为上海先锋工控有限公司为87H7808型号步进电动机研制和生产的驱动器,其外观如图1-31所示。该驱动器的输入电压为DC20~40V,相电流可在0.9~3A之间调节,运行方式包括整步、1/2步、1/4步、1/8步、1/16步、1/32步和1/64步,保护形式包括过热保护、锁定自动半流和错接保护,外形尺寸为115mm×72mm×32mm,重量小于300g。

图1-30 87H7808型步进电动机外观图

图1-31 步进电动机驱动器
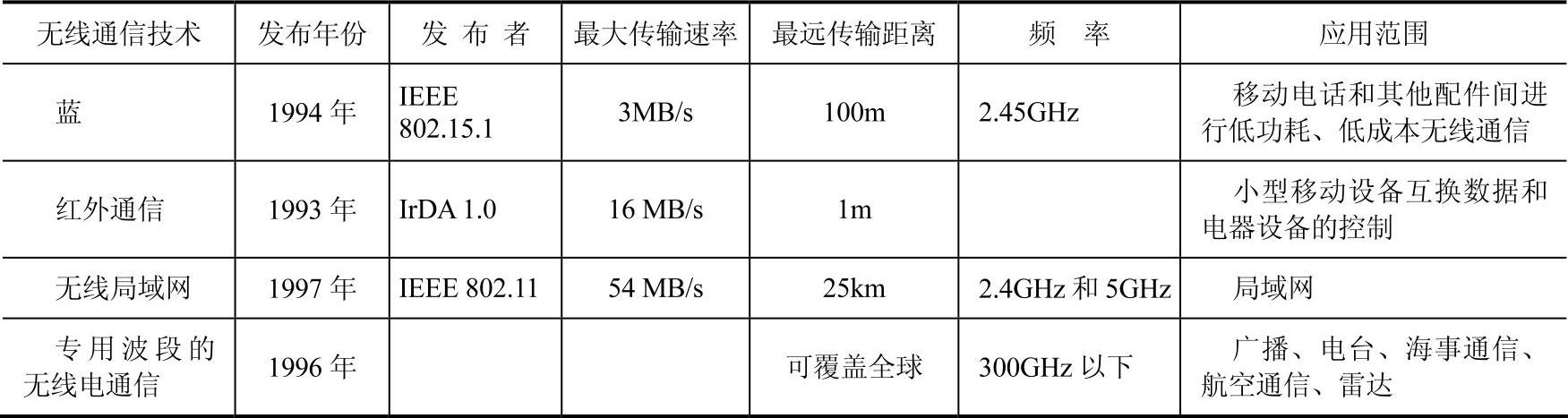
(4)无线通信系统 目前的无线通信技术按照传输距离从近到远,依次有蓝牙技术(BlueTooth)、红外通信技术、无线局域网技术(WiFi)及专用波段的无线电技术等(见表1-10)。蓝牙技术和红外技术一般传输距离较短,带宽有限。专用波段的无线电通信技术可以满足长距离、高带宽的性能要求,但是应用条件苛刻,使用成本高昂。相比而言,采用2.4GHz公共波段的WiFi技术比较合适,且近年来WiFi技术获得了长足发展,带宽和传输距离都有了显著提高,完全能胜任机动平台作业端和遥控端的通信需求。
表1-10 几种无线通信技术的比较
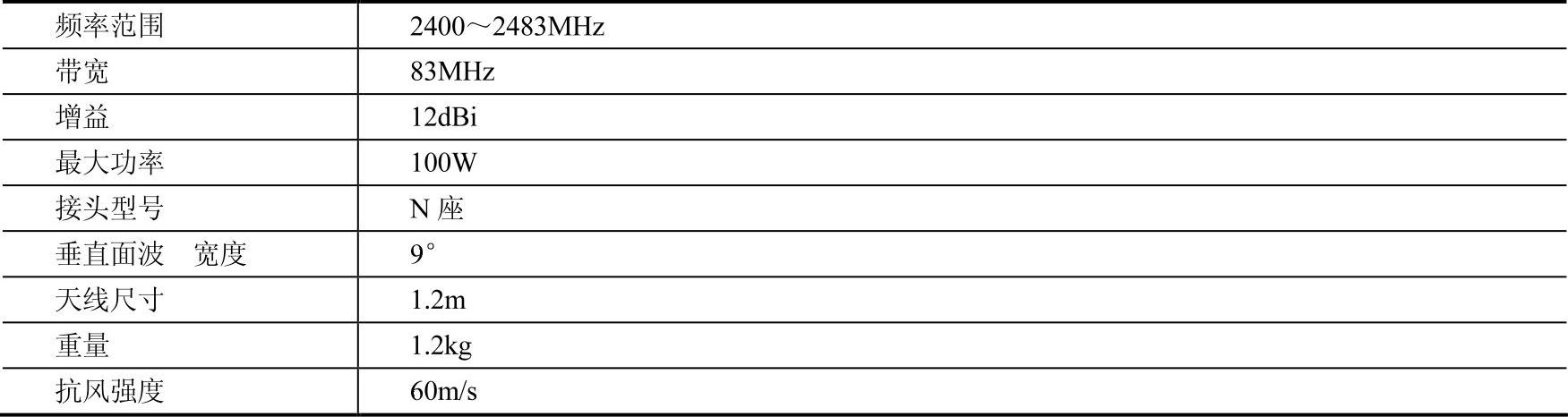
经市场调研,为满足机器人无线通信过程中的实时性和鲁棒性,需要选用稳定可靠的无线通信设备。参考网络资源,可知Ax9000系列无线网桥能覆盖大范围的无线网络,可应用于户外远距离无线通信和大面积区域覆盖,并提供最高达108MB/s的带宽,为无线网络应用提供了可靠、性价比极高的解决方案。该产品采用全天候防水、防尘全密封设计,拥有超强的免维护特性,因此也能够满足机器人恶劣环境作战的要求。Ax9000PE-30无线网桥及XA-212天线的外观图如图1-32所示,具体性能参数分别见表1-11和表1-12。

图1-32 实际安装中的无线网桥和天线
表1-11 Ax9000PE-30无线网桥性能参数(https://www.xing528.com)
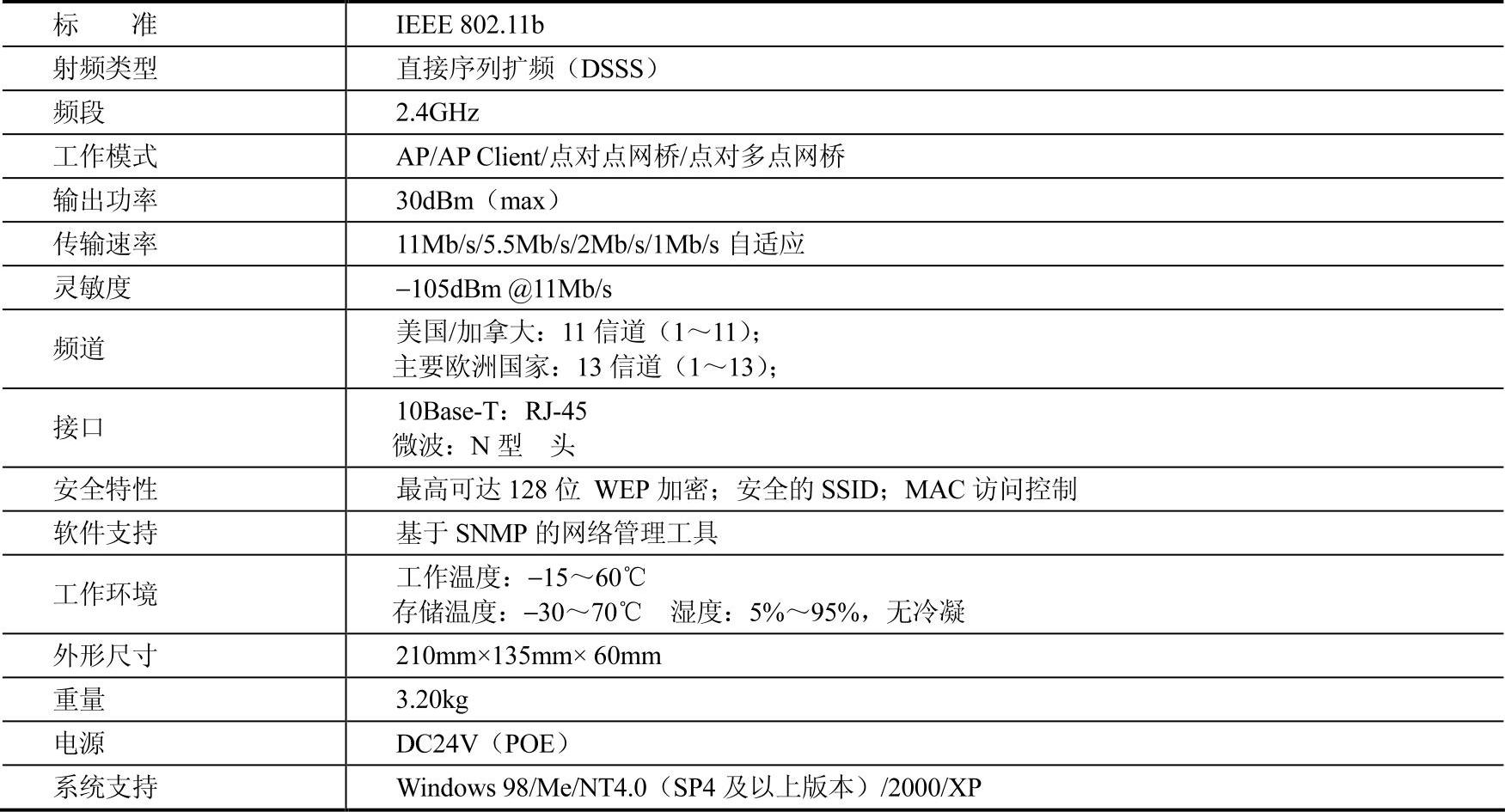
表1-12 XA-212天线性能参数
(5)机器人操控箱设计与制作 机器人操控箱是以工控机主板为核心控制元件搭建起的用户终端操控设备,为了实现专用化,在参考普通台式机组装方法的基础上,有所创新。
1)计算机主板:选型方案有三种:台式机主板、笔记本电脑主板及工控机主板。台式机主板功能丰富,可扩展能力强,价格便宜,但突出特点是体积大,产生热量多,不便于做成便携式操控箱,另外散热方面也不满足要求;笔记本主板体积小,但可扩展能力不强,而该机器人操控需要多任务、多系统操作,不能满足性能要求;工控机主板稳定性、抗干扰性能最强,适合在恶劣环境下作业,符合作战需求,且功能接口较多,可扩展能力强,具有其他主板无法比拟的优越性。因此采用工控机主板作为操控端的主控计算机。经市场调研,采用威盛工控机主板,其具体功能参数如下:
①CUP主频:1.5GHz。
②内存插槽数量:2个DDR2 DIMM内存插槽。
③显卡接口标准:PCI Express。
④硬盘接口标准:SATA。
⑤IDE接口数量:1个。
⑥SATA接口数量:2个。
⑦USB接口数量:6个USB2.0接口。
⑧PCI插槽:1个PCI插槽。
⑨PS/2接口:1个PS/2鼠标接口,1个PS/2键盘接口。
⑩外接端口:1个并行接口,1个COM接口,1个VGA接口,1个RJ45网卡接口,USB接口,音频接口。
(11)电源插口:1个20针电源接口。
2)主板附属配件:液晶屏采用北京华盛万中科技有限公司提供的12吋笔记本液晶屏,为了节省费用,硬盘、ATX电源模块、散热风扇和调试程序过程中采用的键盘鼠标均采用废旧电脑中的硬件,经组装调试,完全不影响使用。操控面板采用四通游戏摇杆,经键盘映射机制,将控制指令与摇杆按钮一一对应,能够起到最终的控制效果。
3)机箱:机箱采用废旧手提箱,主板及附属配件经安装固定,并加以外观美化,完全能够实现操作功能。
3.控制与无线通信的软件编程
(1)无线通信编程 新型多用途反恐防暴机器人的上、下位机之间的通信存在两个特点:频繁的数据传输和恶劣的通信条件。可以通过增加通信带宽的方法来提高数据传输速率,但是在硬件上无法解决由于通信的瞬时中断造成的数据丢失问题,所以在软件算法上提高通信的可容错性尤为必要。
Windows系统支持的TCP/IP通信协议支持UDP和TCP两种通信方式,其中TCP通信方式由于存在“应答返回”机制可以保证数据的完整传输,理论上不存在数据丢失情况。所以采用TCP方式作为上、下位机之间的通信可容错性的基础。
上、下位机之间的通信很可能由于恶劣的通信条件而出现瞬时掉线,而一般的TCP通信方式很难处理这种异常状态,特别是数据传输过程中出现掉线的情况。为此,创建以下一套通信机制作为上、下位机之间的通信可容错性的保证:采用多线程方式实现通信,每个线程执行一个单一但完整的信息接收或发送任务,经历从套接字创建到套接字关闭整个过程,线程的运行过程相对独立;上、下位机都创建两种类型的线程——服务器端线程和客户端线程。服务器端线程创建监听套接字,一旦接收到一个信息即结束该线程并创建另一个具有相同功能的监听线程,保证在任何时刻系统都存在一个监听线程以接收信息;客户端线程根据需要而创建(同一时刻可能存在多个),每个客户端线程在完成信息发送任务后即结束。通过这两种类型的线程,上、下位机可以任意互相收发信息。该机制将通信过程中“因套接字丢失造成信息丢失”的概率大大降低,并且使程序代码的复用性可以在两端实现,减少了程序开发的工作量。上、下位机之间的一次信息收发的流程如图1-33所示。

图1-33 上、下位机之间的一次信息收发的流程
另外,在通信内容上,机器人还有一套自建通信协议,该协议以一个四位数字作为消息头,发送端在发送消息头后根据需要发送数据,接收端在接收消息头后确定接收后续数据或执行消息头指定的相应任务。自建的通信协议不仅发挥了“高层指令字典”的作用,还因简化、梳理了通信内容,成为提高通信可容错性的重要辅助手段。
从理论上来说,上述提高通信可容错性的方法增加了通信负荷和通信延时。计算表明,任何一次信息收发任务所传输的数据量不超过100KB,而通信带宽为54Mb/s,因此上述方法几乎不会造成通信延时。根据测算,对于20KB数据从发送到应答一般耗时12ms,可见,上述方法不仅能大大提高通信可容错性,而且能满足通信实时性的要求。
(2)大功率无刷直流电动机控制编程 cello驱动器配备适用于开发人员编程使用的API函数库,方便项目开发人员调用。当客户端发送指令请求时,在车载平台主控计算机的服务器端接到命令进行响应,同时向客户端发送应答信号,告知命令已响应。在服务器端使用switch/case语句,通过协议代码分析判断发送的指令请求,做出相应的响应动作。在运动指令中,比较重要的几个指令函数是:
1)AC Profiler acceleration limit,in counts/second2
2)BG Begin command
3)BT Begin motion at defined time
4)DC Deceleration,in counts per second2
5)IL Input logic,defining how dedicated inputs behave
6)JV Speed of jogging motion,in counts per second
7)MO Motor on/off
8)PA Absolute position reference for point-to-point motion
9)PR Relative position reference for point-to-point motion
10)SD Stop deceleration
11)SF Smooth factor for motion command
12)SP Speed for point-to-point motion
13)ST Stop motion using deceleration value
14)TC Torque command
在使用这些库函数时直接在程序中调用即可。以控制电动机起动为例,所编辑的程序代码如下:

(3)步进电动机控制并口编程
1)获得驱动器所需的控制信号。目前,在实验室和工业应用的各种控制系统中,串口是常用的计算机与外部控制系统之间的数据传输通道。但是使用串行通信,在实时性、速度、数据量等方面受到限制。而计算机的并行端口传输数据时是一次性传送8个位(一个字节)或更多,由于传输量较大,数据的传输速度要比串口快,因此在许多必须要求传输速度的控制系统里,用PC并行端口与之连接是一个很好的解决方案。
目前,计算机中的并行接口主要作为打印机端口,接口使用的不再是36针接头而是25针D形接头。常见的并行接口有五种:SPP型、PS/2型、EPP型、ECP型和多模式接口。大多数PC机配有SPP并口。SPP标准并行接口有4位、8位、半8位,4位口一次只能输入4位数据,但可以输出8位数据,8位口可以一次输入和输出8位数据;半8位也可以。
计算机的标准配备并行接口即25针的母接头接口共有25支脚,但不是每支脚均被使用到。这些脚被区分为三种主要的功能,分别用于数据的传送、检查打印机的状态及控制打印机,其接口如图1-34所示。
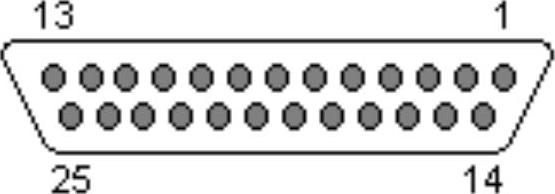
图1-34 并行接口
在PC机中,标准并行口使用3个8位的端口寄存器,PC就是通过对这些寄存器,也就是所说的数据、状态、控制寄存器的读写访问并口的信号的。8个数据位分别为D0~D7,5个状态位为S3~S7,4个控制为C0~C3,其中字母表示了端口寄存器,数字则表示该信号在寄存器中的位。
2)PC并行口数字输出的VC实现
①数据端口数字输出的VC实现:
②控制端口数字输出的VC实现:
③数据端口及控制端口组合成12位数字输出的VC实现
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。