



1.电源系统的设计任务与要求
电源系统作为新型多用途反恐防暴机器人的重要组成部分,相当于机器人的“动力心脏”,对于机器人的正常运行和工作起着基础性的作用。一个高效的电源系统不但可以节省供电能源的消耗、优化系统配置,降低产品的成本,还可以更加科学地提高机器人系统整体的工作运行性能,拓宽系统工作的时间和空间域,使其适应更加复杂和恶劣的环境。合理的电源系统设计必须符合机器人总体系统的性能要求,满足其动力驱动系统、控制系统等等多方面的供电要求,并在此基础上满足供电优化组合设计和配置,使各个系统有序、合理、协调地工作。
新型多用途反恐防暴机器人主要包括履带式车载平台系统、运动控制系统、机器人视觉监测系统、无线通信系统、武器发射系统以及人机交互系统。各个系统均需要电源供应和分配。运动控制系统主要由两台大功率无刷直流电动机及其驱动器、两台步进电动机及其驱动器、机器人主控计算机、减速器和驱动轮构成,主要的用电设备为:两台900W、150V直流供电的伺服电动机是全系统电源供电的主要部分,为强电高压大功率供电;两台步进电动机及其驱动器需要的电流较大(4A),电压(48V)介于高压和低压之间;主控计算机主要的用电设备为控制主板,为低压直流电源12V供电。视觉监测系统由三路远红外摄像头、视频采集卡、视频无线发送模块和视频无线接收模块组成,用电设备主要为摄像头及相对应的收发模块,用电量较小,为直流低压电源供电。无线通信系统由无线网桥和天线构成,无线网桥供电电压为24V,用电量较小。武器发射系统由防暴弹发射器、特种弹药等部分构成,用电量较小。人机交互系统的用电设备主要为操控箱主板,用电量较小,且由于机器人远程遥控的特点,操作人员可选择有220V交流供电的场所进行操作,因此可采用已有的电源模块简化设计。
根据各个系统实际的性能指标和相关参数,电源系统设计需满足以下基本要求:
1)满足各个系统所需的用电要求,并满足整个系统的工作时间要求。
2)满足交、直流供电要求。
3)设计双电源供电系统。电源分为使用电源与备用电源,当使用电源不能正常工作时,备用电源能够立刻起作用。
4)电源设计尽量安全、简单。电池要易于拆装和更换,确保在最短的时间内更换电源,提高作战的连续性,保障作战任务的顺利进行。
2.电源系统的整体设计思路
电源系统的设计主要分为电池系统设计和电源电路设计两部分。
(1)电池系统设计 电池系统的设计,一方面需要寻找一种合适的供电电池,既能够满足系统供电要求,又能保证系统的安全性,另一方面需要根据机器人车载空间的限制合理分布电池系统,同时满足电池的安全性和稳定性要求。电池系统的设计步骤如图1-19所示。
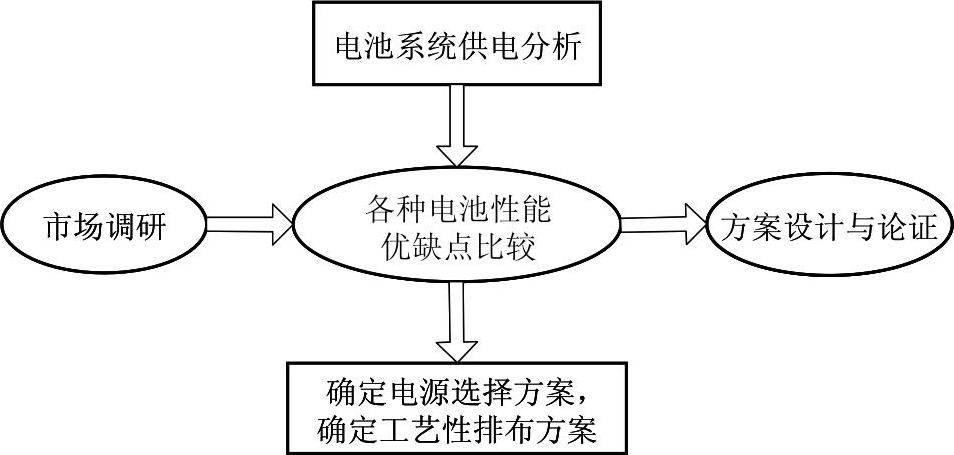
图1-19 电池系统的设计步骤
(2)电源电路设计 电源电路主要包括电源控制电路(交流、直流)、电池充放电电路等。电源控制电路的设计主要针对各个电源设备的分布、性能指标和用电要求,优化线路的同时,兼顾提高线路安全性。电源电路的设计步骤如图1-20所示。

图1-20 电源电路的设计步骤
3.能源电池的选择与比较
目前我国车载电池的种类较多,有阀控密封式铅酸蓄电池、镍氢电池、镍镉电池、锂离子电池、聚合物锂电池、锌空气电池、燃料电池等等。其中,铅酸蓄电池的价格最低、使用量最大。通过对各种电池进行分析对比,兼顾新型多用途反恐防暴机器人对于电池的相关要求和性能指标,选择沈阳松下公司生产的LC-X1224型铅酸阀控式蓄电池,它采用11片极板,初期容量不大,但是寿命相对很长。电池外观图如图1-21所示。
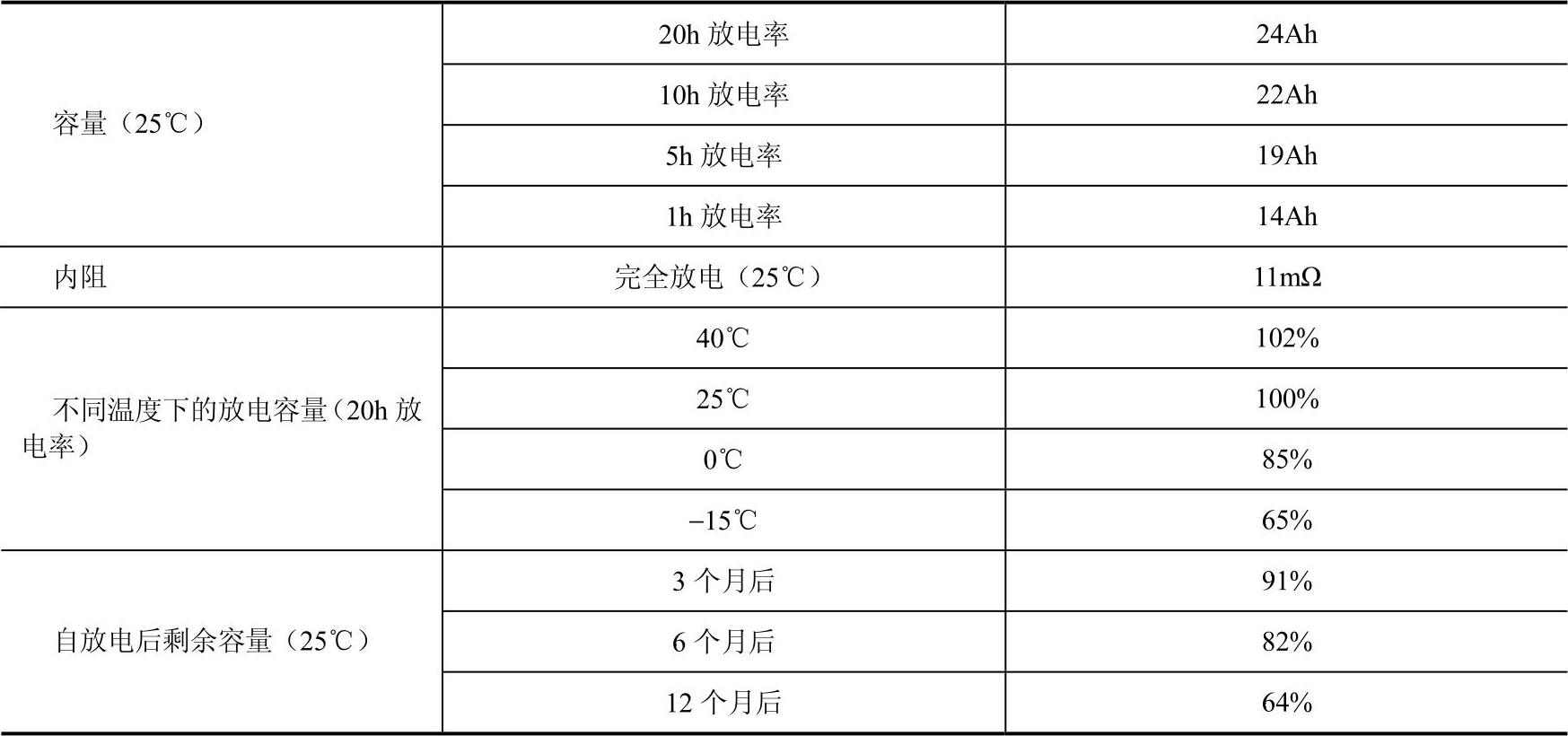
根据机器人各部分的用电要求,购买13块电池,每个电池的容量不低于20Ah。考虑到理论放电与实际放电的误差,选择20h放电率为24Ah的电池。电池特性见表1-4。电池放电性能良好,能够满足电源供应的基本需要。

图1-21 LC-X1224型铅酸阀控式蓄电池外观图
表1-4 电池特性
4.电源电路设计
机器人各部分的供电需求见表1-5。大功率无刷直流电动机和步进电动机对于电源品质要求较高,应考虑添加稳压装置和熔断保护电路,主板供电要求输出电压要平稳,因此也要考虑添加稳压模块。另外,值得注意的是机器人电气设备应注意绝缘保护。(https://www.xing528.com)
表1-5 机器人各部分的供电需求

(1)设计原则与要求
1)双电源供电模式:车载平台系统采用拖缆供电-蓄电池双电源供电模式,一方面为了方便调试,另一方面也保证了即使在车辆蓄电池耗尽时仍可以继续进行工作。两种工作方式通过车体后部的钥匙开关进行切换。机器人所用的电缆是四芯电缆,两根线是通过外置稳压电源获得的150V直流,另两根是220V交流,为机动平台单板计算机的AT电源供电。
2)强弱电的物理隔离:能源动力系统中,把强电与弱电、动力电与控制电在物理上进行隔离,从而防范由于强弱混用可能造成的风险。在本系统中,对于150V大功率无刷直流电动机、48V步进电动机、24V无线网桥和警灯的供电作为高压路,采用12块铅酸电池串联并配合相关DC/DC芯片进行供电。而对于其余的12V和5V的供电需求,因该部分主要是对于主板供电,所以单独使用一块铅酸电池配合相关DC/DC转换器进行供电。
3)快捷便利的电池充放电转换:机器人中串联有12块电池,对电池充电一个需要研究的问题。需要设计一套充放电转换电路以快速实现电池组由放电到充电的转换。经过测试发现,所使用的铅酸电池在12块串联时充电时间长达13h,而且存在充电不均匀现象。为了解决这个问题,准备在充电时将12块电池分为三组,每组4块同时进行充电,显然这样可以缩短充电时间,并使电池电量更加均匀。这是电源充放电电路的设计要求。
4)绝缘与保护:绝缘包括电池组的绝缘、用电设备的绝缘,保护电路主要集中在用电器部分,主要作用是稳定电路中电压,滤除纹波。
(2)电源系统的组成 电源系统的组成见表1-6。
表1-6 电源系统的组成

(3)电气原理图
1)强电电路。强电电路包括直流150V、48V、24V线路的设计。强电电路部分原理图如图1-22所示。
①双电源供电:由于机器人采用拖缆-直流双供电模式,双电源切换采用一个双刀双掷开关(见图1-22中的SW2),方框圈住的部分是在机器人外的交流电及150V直流稳压电源。BT1、BT2、BT3是150V电池组,通过开关SW2可以方便地实现两种动力模式的切换,中间态时关停。
②快速充放电切换:通过双刀双掷开关SW1实现,150V电池组被分为三组,每组50V,分别为BT1、BT2、BT3,当开关切换时,可以实现电池组的串联和断开,从而实现快速充放电。电池组串联给用电器供电,断开时连接相应的充电接口,通过外接的50V充电器即可实现充电。
③用电器供电:150V除了直接给主电动机进行供电外,一路接在DC/DC150V-48V上(模块电源1),输出48V在给发射器步进电动机供电,还有一路接入DC/DC48V-24V(图1-22中的模块电源2),输出的24V为无线网桥供电。

图1-22 强电电路部分原理图
2)弱电电路。弱电电路包括直流12V、5V线路的设计。弱电电路部分原理图如图1-23所示。
①双电源供电:双电源切换采用一个双刀双掷开关(见图1-23中的S4),方框圈住的部分是在车体外的交流电,P2是车内的一块台式计算机上的AT电源,输出12V。BT4是一块铅酸电池,输出12V。通过开关S4可以方便地实现两种动力模式的切换,中间态时关停。
②快速充放电切换:通过开关S3实现快速充放电。充电接口配用12V充电器。
③用电器供电:12V输出后,经过一个DC/DC 12V-12V的稳压模块(图1-23中DC/DC-12),输出电压12V,用于车辆上的主板、3个摄像头、3个无线模块的供电。12V再经过一个DC/DC 12V-5V(图1-23中DC/DC-5),输出电压5V用于主板供电和步进电动机驱动供电。
④绝缘与保护:本部分保护电路主要是DC/DC 12V-12V的稳压模块(图1-23中DC/DC-12),这个稳压模块主要为下一级的主板供电提供一个稳定的电压,防止电压突然变化对于主板造成的损坏。当电池电量显著下降时,该稳压模块可以在一定程度上提供一个可以让主板继续工作的环境,使之不因为电压过低而掉电。
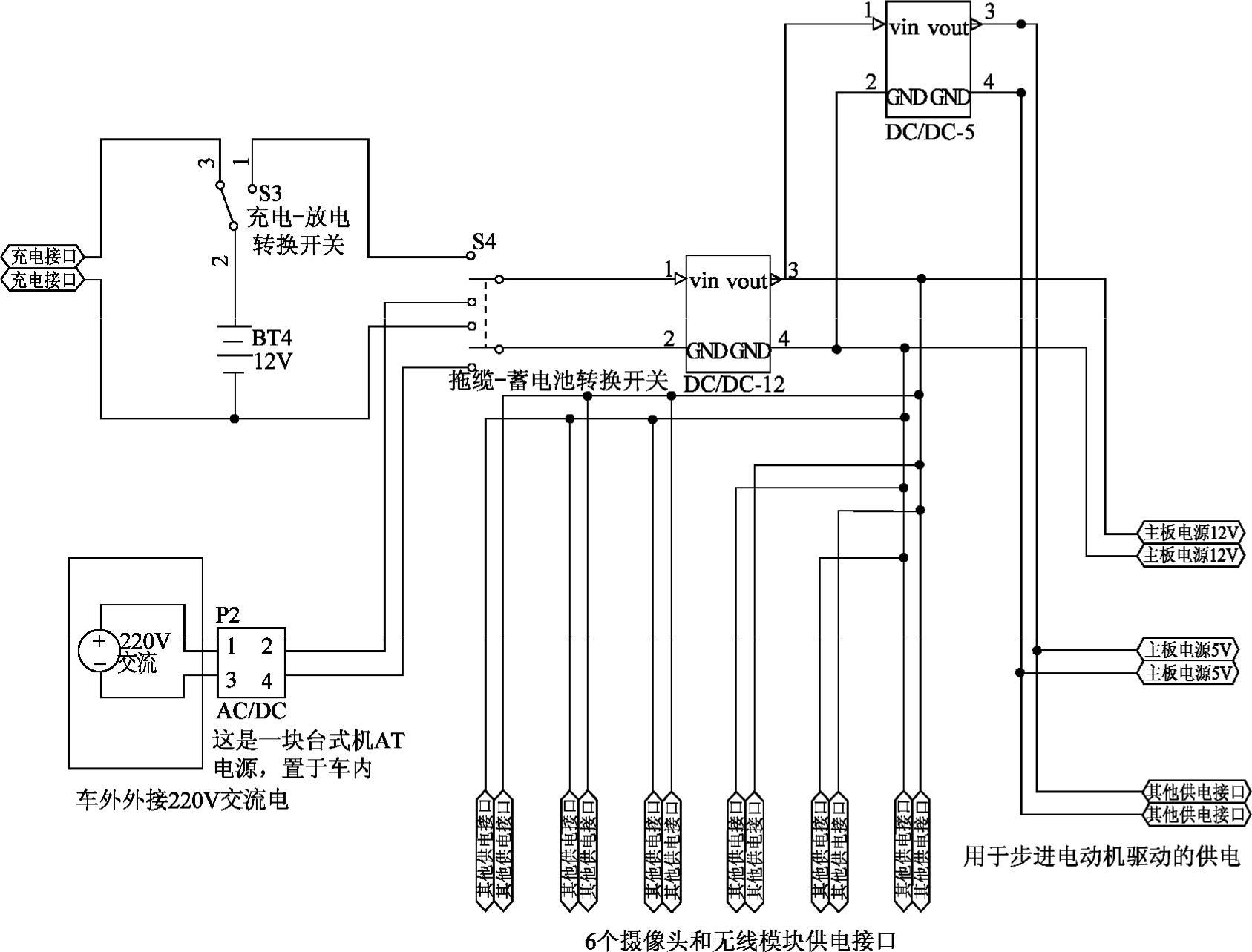
图1-23 弱电电路部分原理图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。