



机器人视觉监测系统是利用机器视觉代替人眼来做各种测量和判断,通过视觉传感器获取环境的二维图像,并通过视觉处理器进行分析和解释,进而转换为符号,让机器人能够辨识物体,并确定其位置。一般包括照明系统、镜头、摄像系统和图像处理系统,是机器人系统中不可缺少的组成部分。根据新型多用途反恐防暴机器人的用途,要求其在视觉方面能对前进路况进行有效探查、对特殊目标能够有效瞄准、对整体环境能够充分把握、对特定目标能够准确识别。在以上四个方面的要求下结合机器人的造型、效果、布局、内部构造等进行机器人视觉监测系统的选型和方案论证。
1.方案论证和选型
由于一个摄像头无法同时完成目标瞄准、路况勘测和场景监视三项任务,需要多个摄像头并行实行这三项任务,因此选用三个摄像头作为机器人视觉系统的组成部分。另外,三个摄像头的位置选择对机器人的整体视觉效果有着重要的影响,最终确定的摄像头在机器人上的安放位置如图1-13所示。这样的位置选择充分利用了机器人的外形特点和布局特点,使摄像头可以充分发挥各自的作用。此外,三个摄像头可以利用自身的特点(旋转、俯仰)做到全面的探测和观察,避免了过多摄像头增强图像处理的难度,同时又兼顾了视觉系统的价格要求。
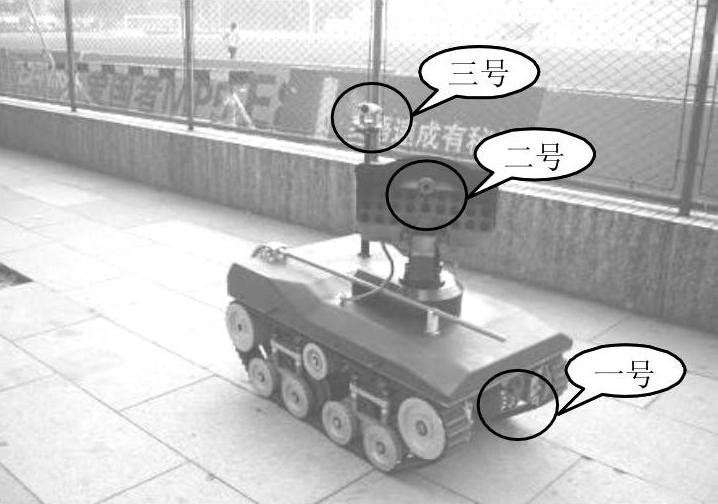
图1-13 摄像头在机器人上的安放位置
图1-14为机器人视觉监测系统的组成图。一号、二号、三号摄像头均选择无线传输,无线摄像头使用单独的传输通道,不占用无线网络,减少了视频传输对控制系统的干扰。视频信息通过无线接收模块,将模拟信息直接传到控制终端。
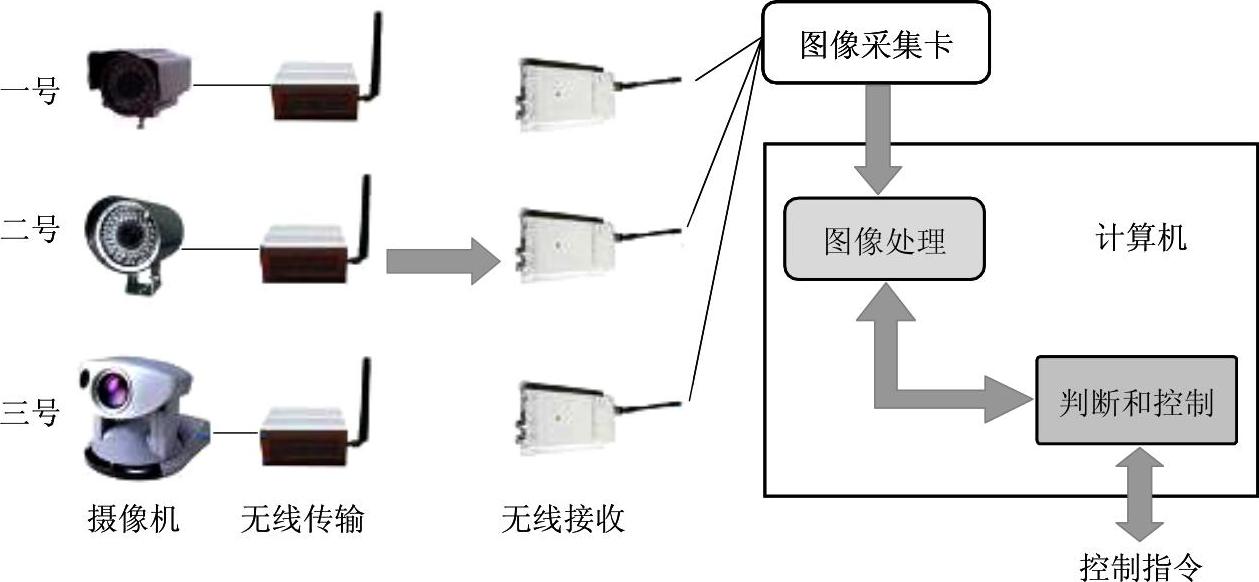
图1-14 机器人视觉监测系统的组成图
(1)模拟摄像头和数字摄像头的比较 模拟摄像头多为CCD类型,不同档次的分辨率不同。模拟摄像头捕捉到的视频信号必须经过特定的视频捕捉卡将模拟信号转换成数字模式,并加以压缩后才可以在计算机上运用。数字摄像头是一种数字视频的输入设备,它利用光电技术采集影像,通过内部的电路把这些代表像素的“点电流”转换成为能够被计算机所处理的数字信号0和1,而不像视频采集卡那样首先用模拟的采集工具采集影像,再通过专用的模/数转换组件完成影像的输入。
模拟摄像头使用CCD作为感应器,成像质量好,但由于制造工艺复杂,价格较高;数字摄像头使用CMOS作为感应器,在相同分辨率下,CMOS价格比CCD低,但CMOS器件产生的图像质量比CCD要差一些,且在分辨率640×480以上捕捉速度不是很快。市面上绝大多数的消费级别及高端数码相机都使用CCD作为感应器;CMOS感应器则作为低端产品应用于一些摄像头上。为了提高成像质量,作品选用了模拟摄像头。
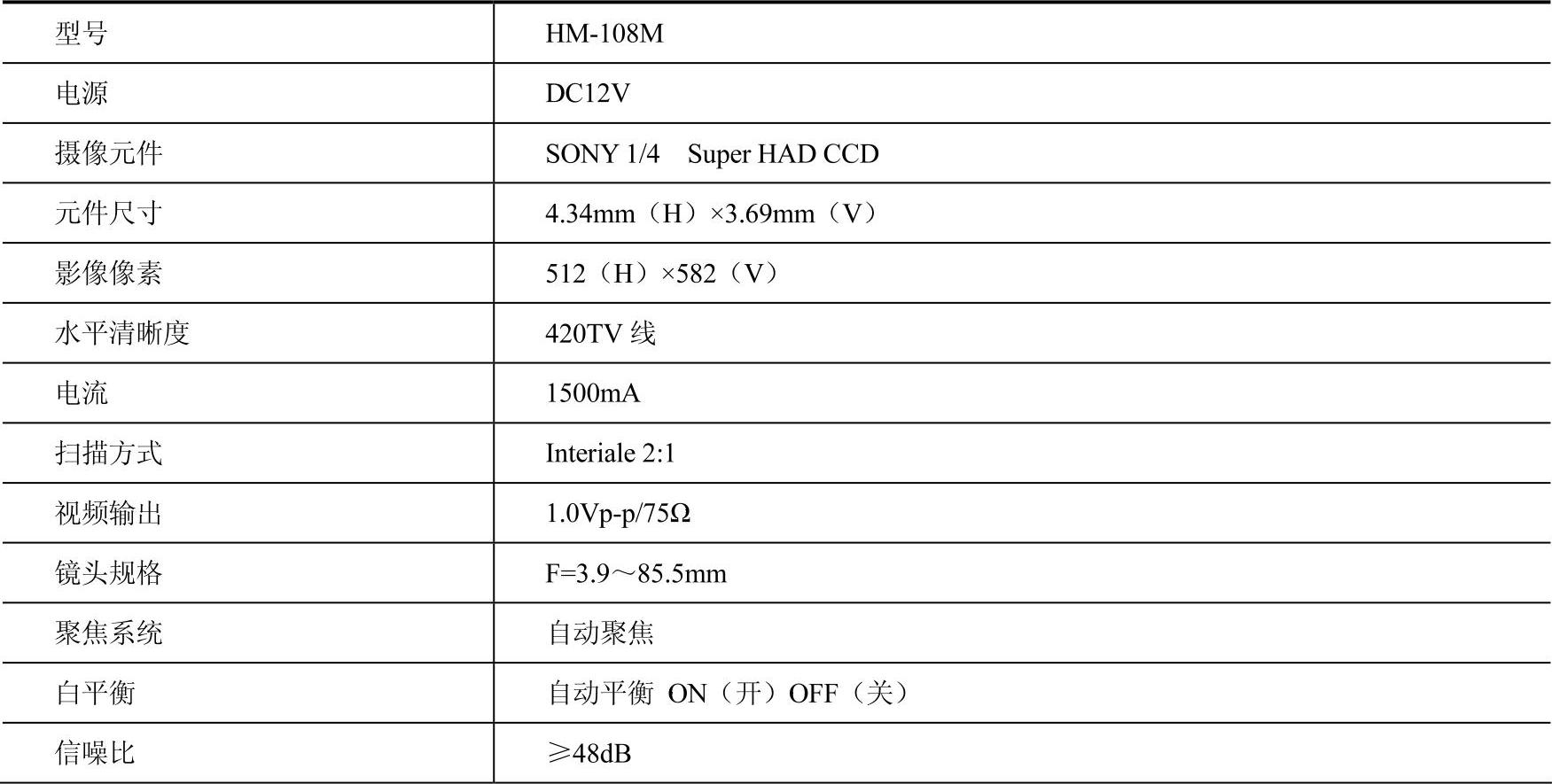
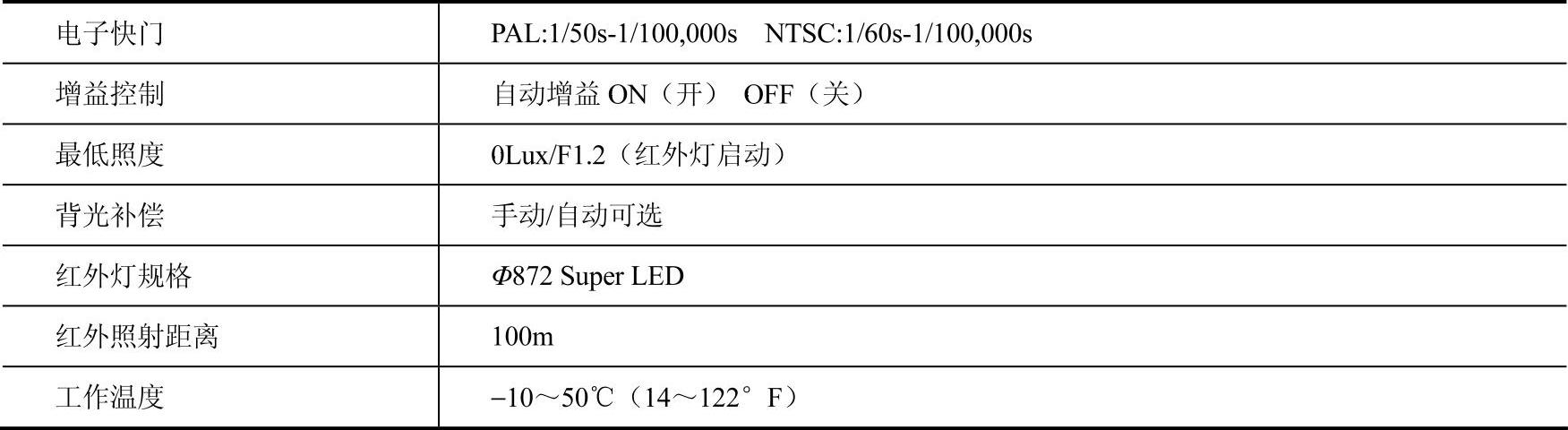
(2)三个摄像头的选型 对于一号和二号摄像头,选用HM-108M远红外摄像头,如图1-15所示,其性能参数见表1-1。
表1-1 HM-108M远红外摄像头性能参数
(续)
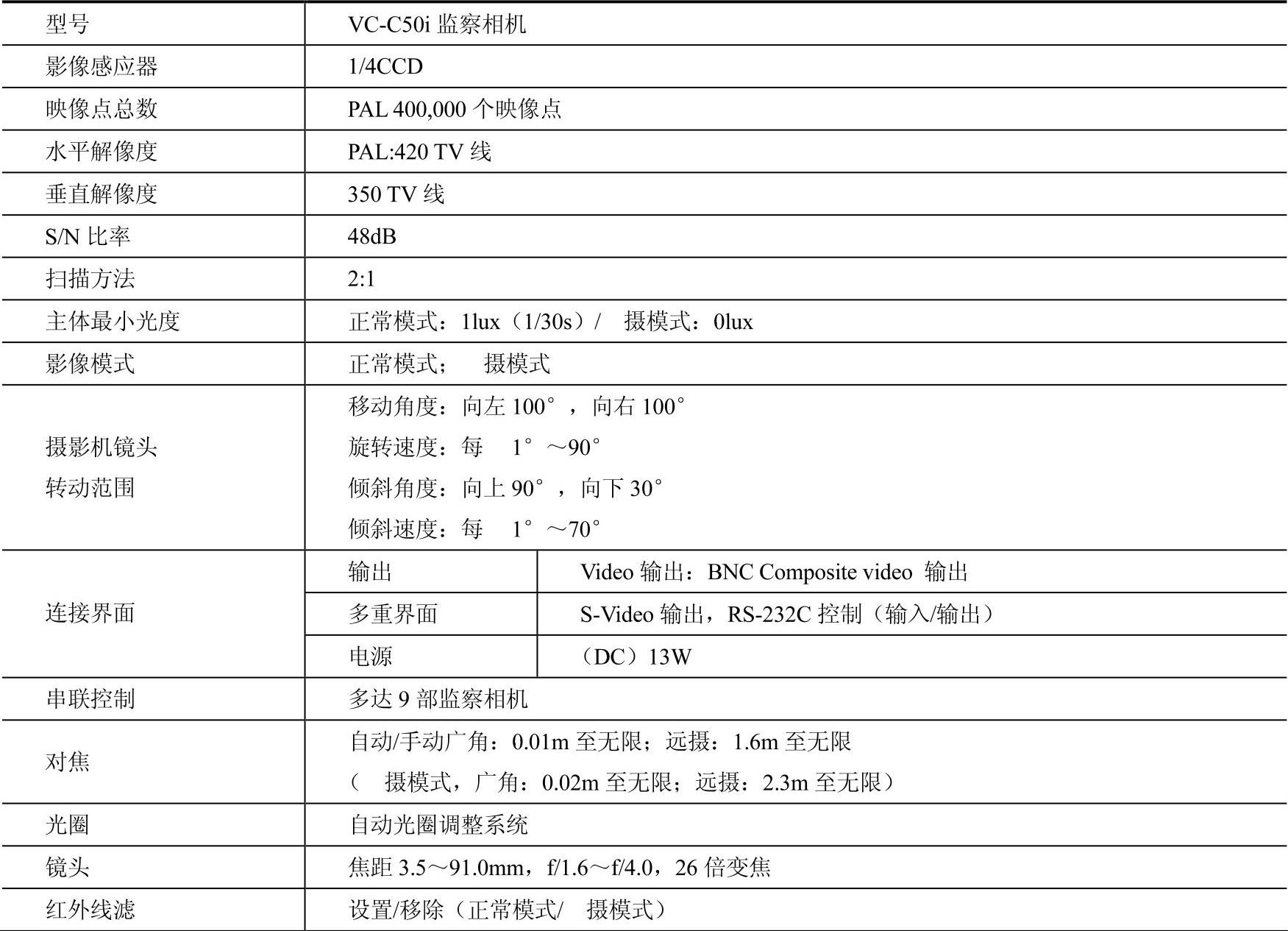
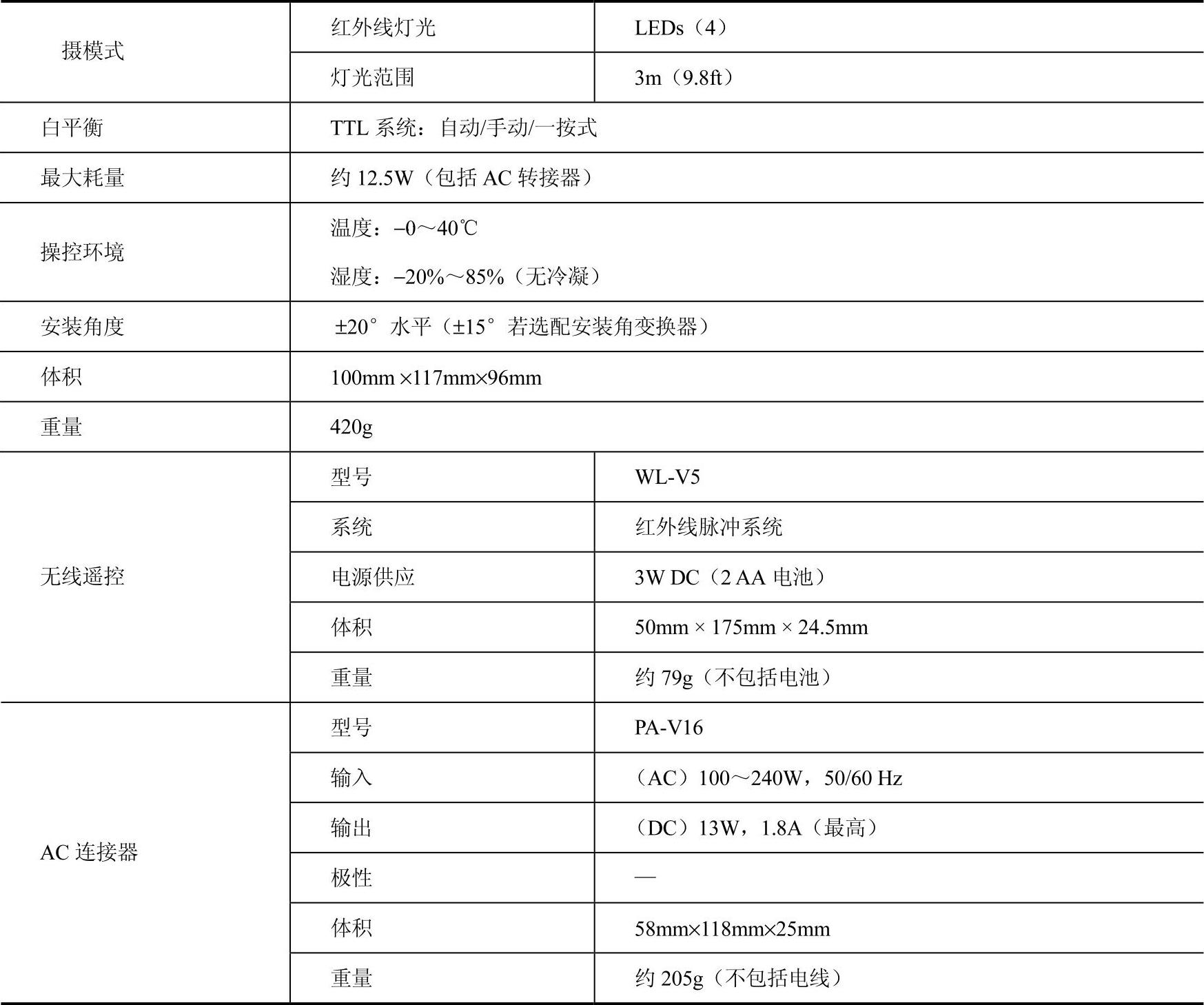
三号摄像头如图1-16所示,选用佳能VC-C50i摄像头,其性能参数见表1-2。

图1-15 一号和二号摄像头

图1-16 三号摄像头佳能VC-C50i
表1-2 佳能VC-C50i摄像头性能参数(https://www.xing528.com)
(续)
(3)无线收发模块的选型 无线收发模块如图1-17所示。
视频无线发射器参数:频率:2.4GHz;频道:4;功率:1000mW;距离:800~1200m;传送:影音同步;电源:(DC)12V/500mA;尺寸:62mm×53mm×35mm;重量:135g。
无线收发机参数:频率:2.4GHz;频道:4;调整:手动拨频;天线接头:FC;尺寸:115mm×80mm×20mm;电源:(DC)12V;重量:150g。
全套设备包含:无线发射器、无线接收机、音视频线、信号线、天线。
(4)视频采集卡的选型 这里所讲的图像采集卡是指将已生成的模拟图像信号转换成数字图像信号输入计算机的设备。无线摄像头基本上都是模拟信号,通常用电视线进行连接,调制模式基本上是调频形式,这样为了便于在PC机上进行观察,所以需要对采集的模拟信号进行转换,采用视频采集卡对其进行处理。
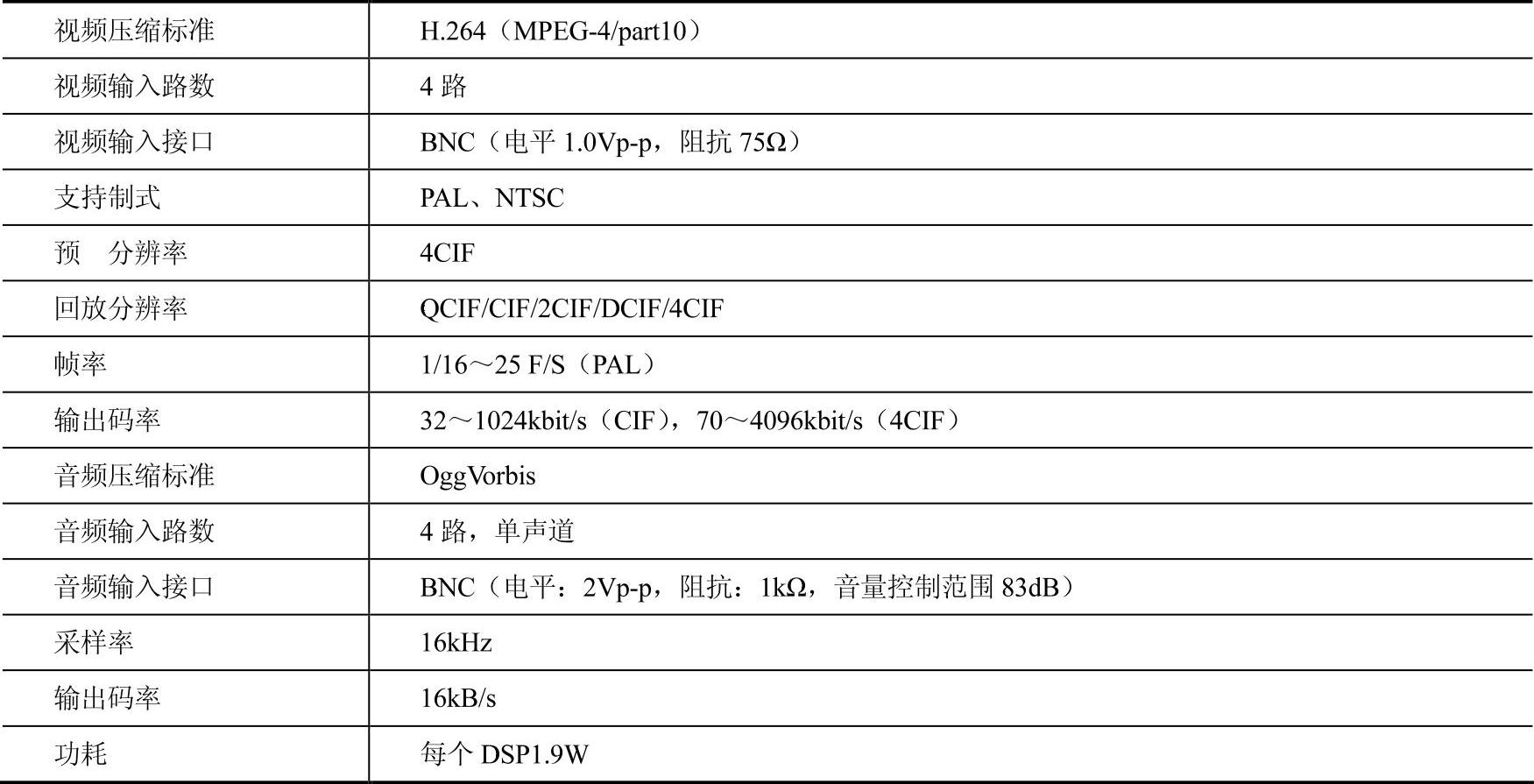
采集卡分为硬件压缩型和软件压缩型两种。硬件压缩型采集卡能节约系统资源,性能较为稳定,但价格较高;软件压缩型采集卡占用较多系统资源,但价格便宜。考虑到控制端因受体积和操作方便性等要求的影响,系统资源有限,并且以后会需要对机器进行图像处理功能的进一步开发,因此采用硬件压缩型卡。选用的视频采集卡如图1-18所示,性能参数见表1-3。

图1-17 无线收发模块
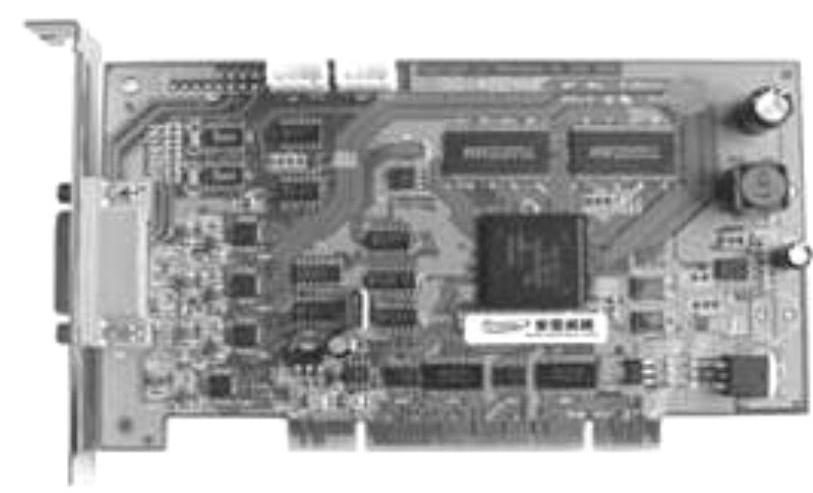
图1-18 海康威视DS-4004HC视频采集卡
表1-3 海康威视DS-4004HC性能参数
2.图像处理基础
图像经过采样,模拟图像已在时间、空间上离散化为像素。但采样结果所得像素的值仍是连续量。把采样后所得的这些连续量表示的像素值离散化为整数值的操作称为量化。若连续浓淡值用z来表示,则对于满足zi≤z≤zi+1的z值都量化为整数值qi。qi称为像素的灰度值。z与qi的差称为量化误差。一般每个像素的灰度值量化后用一个字节来表示。把由白到灰到黑的连续变化的灰度值,量化为0~255共256个灰度级。量化后的灰度值,代表了相应的浓度程度。灰度值与浓淡程度的关系有两种表示方法,一种是由0~255对应于由黑到白,另一种是由0~255对应于由白到黑。对只有黑白二值的二值图像,一般用0表示白,用1表示黑。
一幅图像在采样时行、列的采样点数与量化时,每个像素量化的级数既影响到数字图像的质量,也影响到该数字图像数据量的大小。量化级数一定时,采样点数不同对图像质量有影响:当每行的采样点数减少时,图像上的块状效应就逐渐明显。人眼每度视角内像素点对越少,则图像上的块状效应越明显,随图像量化级数的减少,图像会逐渐失去灰度平滑变化的特点。原来灰度平滑变化的部分,由于量化级数的减少而使灰度产生较大的差别,导致图上出现假轮廓。假轮廓随量化级数的减少而越来越明显,量化级数最小的极端情况就是二值图像。
在数字图像处理中,灰度直方图是最简单、最有用的工具。可以说,对图像的分析与观察直到形成一个有效的处理方法,都离不开直方图。灰度直方图是灰度级的函数,描述的是图像中该灰度级的像素的个数,即横坐标表示灰度级,纵坐标表示图像中该灰度级出现的个数。通过修正图像直方图进行图像增强是一种有效的图像增强方法。直方图修正增强技术是以直方图作为变换的依据,使变换后的图像直方图成为期望的形状。直方图均衡化也称为直方图均匀化,就是把给定图像的直方图分布改变成均匀分布的直方图,它是一种常用的灰度增强算法。
新型多用途反恐防暴机器人以上述理论基础来进行相关图像的处理,为目标识别、大场景观测等作战任务服务。总之,机器人为完成作战任务,配备了上述高性能视觉监测装置,使机器人的各项性能有了大幅度的提升,为今后军用机器人多路视觉监测设备的研制积累了经验。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。