



新型多用途反恐防暴机器人的机械造型采用PRO/E造型软件设计,进行了三维虚拟现实仿真、性能分析、加工制造等诸多工作,使机器人的运动性能有可靠的保证。结构造型设计主要分为机动平台造型、发射器云台造型和防暴弹发射器造型三部分,组装(未加迷彩设计时)后的机器人实物图如图1-2所示。其中轻型履带机动平台减震悬挂装置、履带自动张紧装置、大功率负载云台装置是机器人机械部分的三大亮点。

图1-2 组装后的机器人实物图
1.轻型履带式机动平台减震悬挂装置
履带式移动平台的减震悬挂装置主要用于连接平台负重轮与车体,起到改善平台机动性能和调节履带张紧程度的作用。目前,普通的履带式车辆一般采用液压、气压、扭杆弹簧等悬挂装置,而这些悬挂装置因体积庞大、结构复杂、成本高昂等缺点,不利于直接移植到轻型履带式机动平台上。现有的轻型履带式机动平台悬挂系统往往采用直接的刚性连接或者简易的减震悬挂装置,虽然结构简单、成本低廉,但减震效果较差,不能适应轻型履带式机动平台高速越野机动的实际需要。此外,现有的轻型履带式机动平台悬挂装置功能单一,缺乏冗余度与履带张紧的调节能力,这些都制约了轻型履带机动平台及履带式移动机器人机动性能的发挥。
针对现有悬挂装置在结构、体积、功能及成本等方面的缺点,设计了一种能够适应轻型履带式机动平台高速越野机动要求的可调式减震悬挂装置,其结构示意图如图1-3所示。
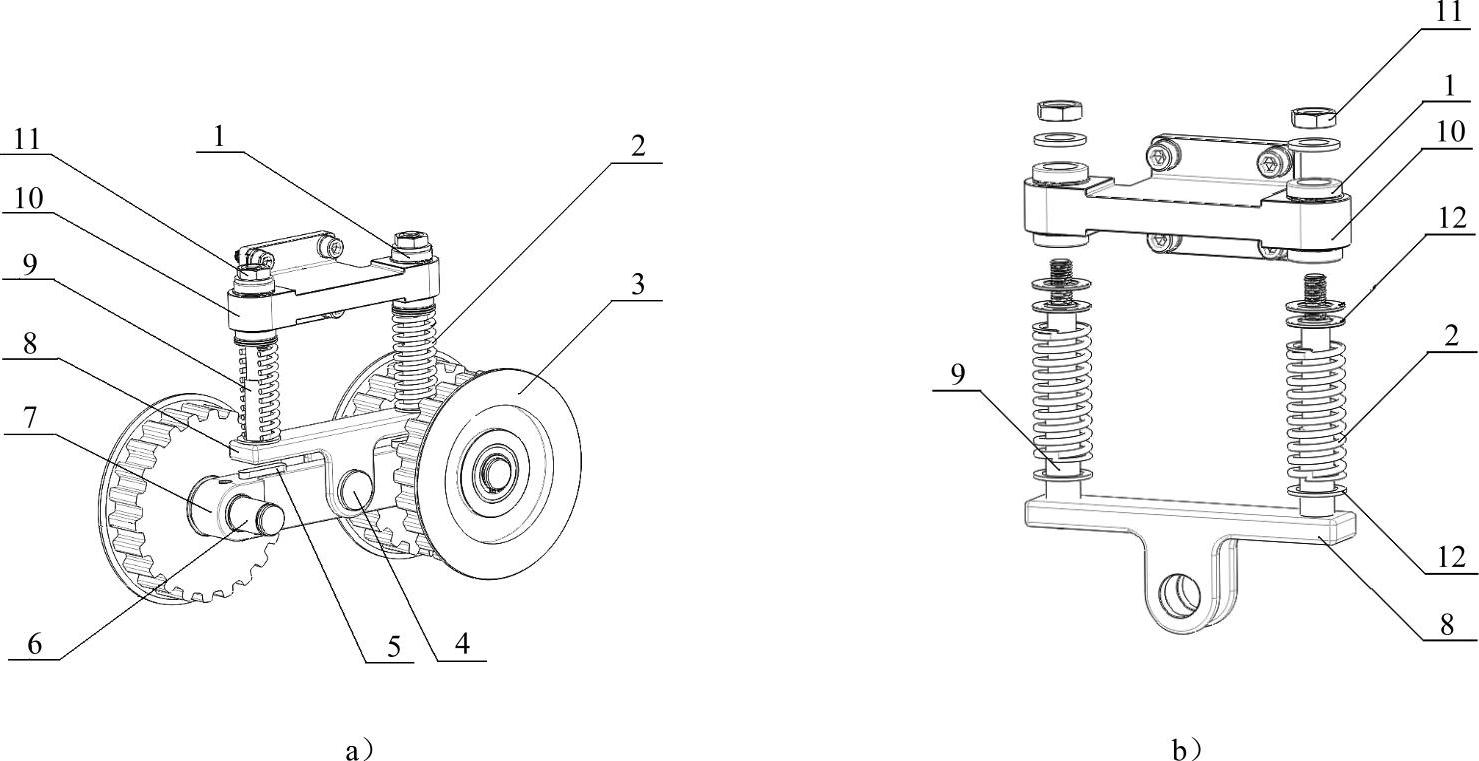
图1-3 减震悬挂装置结构示意图
a)整体结构示意图 b)弹簧减震组件分解结构示意图
1—直线运动球轴承 2—螺旋弹簧 3—承重轮 4—销轴 5—橡胶垫 6—承重轮轴 7—承重轮连杆 8—T形转动支架 9—导向移动轴 10—悬挂装置固定座 11—限位调节螺母 12—调节垫圈
两根承重轮轴6穿过承重轮连杆7两端的通孔,承重轮3对称安装在承重轮轴6的两端,承重轮连杆7与T形转动支架8通过销轴4在连杆中点铰接,使得纵向布置的承重轮组件在通过崎岖路面时可以根据地形起伏发生偏转,从而均匀分配地面对悬挂系统的冲击;T形转动支架8的上部两端竖直插入贯穿螺旋弹簧中心线的两根导向移动轴9,导向移动轴9的上端穿过悬挂装置固定座10,并在顶端装有限位调节螺母11,导向移动轴9和悬挂装置固定座10之间装有直线运动球轴承1,该轴承在确保轴向相对运动精度的同时,可降低零件的摩擦损耗;悬挂装置固定座10与T形转动支架8共同限制了螺旋弹簧2的轴向位置,构成了悬挂系统的弹簧减震组件。当机动平台通过崎岖路面时,导向移动轴9与悬挂装置固定座10产生相对位移,螺旋弹簧2受压变形,吸纳能量,实现减震;悬挂装置固定座10通过四个螺栓固定在机动平台底盘侧壁上,实现了悬挂装置的模块化配置,便于整体装卸,且定位牢固可靠。螺旋弹簧2与转动支架8之间及限位调节螺母11与悬挂装置固定座10之间装有若干调节垫圈12,通过增减垫圈的数量与厚度,可以调节悬挂系统刚度和履带张紧程度。
该减震悬挂装置具有以下优点:
1)在轻型履带式机动平台通过崎岖路面时,悬挂装置通过弹簧变形与转动支架摆动实现双重减震,可有效提高轻型履带式机动平台的越障能力与行驶稳定性。
2)悬挂装置具有良好的调节功能,可根据需要调整悬挂系统的刚度和履带的张紧程度,且操作方便,机动灵活。
3)使用直线运动球轴承,在确保轴向相对运动精度的同时,降低了零件的摩擦损耗。
4)悬挂装置与机动平台的连接方式简单、牢固,实现了悬挂系统的模块化设计,可广泛应用于各种轻型履带式机动平台和履带式移动机器人。
2.履带自动张紧装置
履带式机动平台或履带式车辆多在全天候和全路况条件下使用,作业环境的恶劣性和作业任务的艰巨性,使得履带容易发生弹性伸长甚至一定的塑性伸长,为了适应上述伸长,保持履带的驱动力,一般都必须设置履带张紧装置。履带张紧装置具有可在履带上实现调节并保持适当张紧力的功能。作者所设计的履带自动张紧装置结构示意图如图1-4所示,它在机动平台上的安装位置如图1-5所示。该装置是一种适用于轻型履带式机动平台或微小型履带式车辆的履带自动张紧装置,结构简单、功能可靠、性能稳定,不但能够方便地调节履带的张紧程度,而且在履带弹性伸长范围内还具有一定的自动张紧功能。
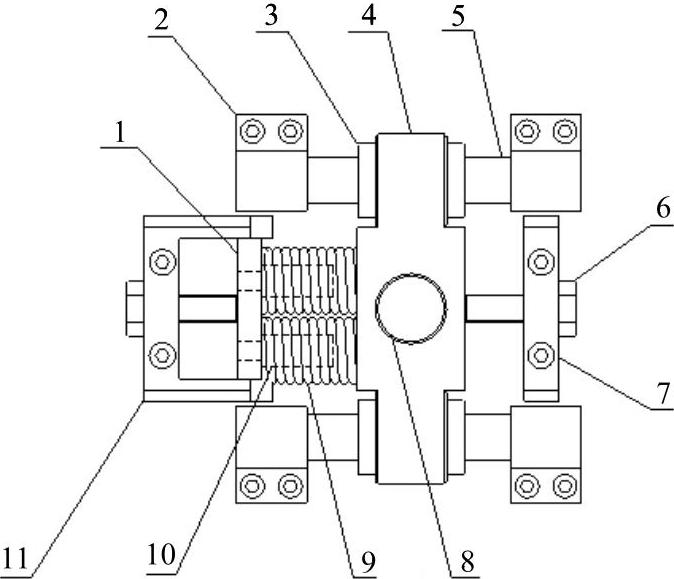
图1-4 履带自动张紧装置结构示意图
1—弹簧导轴座 2—导向轴座 3—直线运动球轴承 4—支撑轴座 5—导向轴 6—螺栓 7—预紧座 8—支撑轴 9—弹簧 10—弹簧导轴 11—弹簧调节座
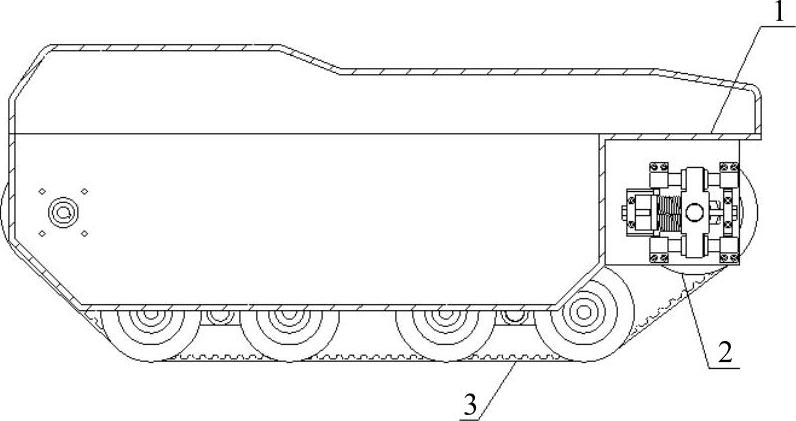
图1-5 轻型履带式机动平台整体布局示意图
1—车体 2—从动轮 3—履带
履带张紧装置由预张紧组件和自适应张紧组件构成。预张紧组件主要包括导向轴座2、直线运动球轴承3、支撑轴座4、导向轴5、预紧座7、弹簧调节座11等。直线运动球轴承3分别插入支撑轴座4两端的圆孔中,并用弹簧挡圈固定,两个导向轴5穿入两个直线运动球轴承3的内座圈,直线运动球轴承3在导向轴5上活动自如,在导向轴5的两端各装上导向轴座2,并用内六角螺钉把导向轴座2固定在车体1上从动轮安装位置处的后面,弹簧调节座11位于支撑轴座4的左侧,预紧座7位于支撑轴座4的右侧,二者均用内六角螺钉固定在车体1上。自适应张紧装置包括弹簧9、弹簧导轴10和弹簧导轴座1,弹簧9套在弹簧导轴10的外部,弹簧导轴10固定在弹簧导轴座1上。
通过调节螺栓6旋入弹簧调节座11和预紧座7的深度可确定一个预张紧区间,使支撑轴座4在这个区间内运动,而弹簧9和弹簧导轴座1可以使整个装置在此区间内具有一定的自适应张紧力调节功能。当有外力迫使履带伸缩时,支撑轴座4就会压缩弹簧9,从而改变从动轮2的位置确保履带3的张紧值;当外力消失后,弹簧9将支撑轴座4推回原来的位置,使履带3恢复到原有的状态,这样履带3的张紧程度将维持在合适范围内,保证轻型履带式机动平台或微小型履带式车辆的正常行驶。(https://www.xing528.com)
3.大功率负载云台装置
大功率负载云台装置是由两个电动机组成的运动平台,可以实现水平方向和垂直方向的全方位运动。内部的两个电动机分别负责云台的上下和左右各方向的转动。当上、下动作装置通电时,垂直电动机转动,经减速装置带动垂直传动轮盘转动;当左、右动作装置通电时,水平电动机转动并经减速器带动云台底部的水平转动盘转动。
结合新型多用途反恐防暴机器人的设计意图与功能要求,首先制定云台的设计性能指标,主要包括:云台的转动速度(包含水平转速和垂直转速)、云台的转动角度、云台的载重量、回差、可靠性及使用环境指标。明确云台的功能和造型任务后,运用Por/E和Autodesk Inventor进行机械造型设计。首先,确定几个关键的轴系:承重和定位回转中心的下主轴、负责水平回转动力的下蜗轮轴、负责垂直回转动力的上蜗轮轴及上蜗轮连接的毂轴。整套机构在水平回转上采用蜗轮蜗杆侧置,在垂直俯仰上采用蜗杆下置式。
下主轴在整个系统中最为关键,装上蜗轮的下主轴整体结构如图1-6所示。在下主轴的上端设计有M50的大螺纹,用一个垫圈置于深沟球轴承内圈,满足轴承支撑条件,再用一个大螺母锁紧达到固定整个下转动机件相对位置关系的目的。
在车体上盖纵深方向上,安置蜗杆及电动机部件。电动机支座和下转动部件的三维装配图如图1-7所示。电动机支座与蜗杆的后端支撑整合成一个零件。这样既减少了转动部件的零件个数,又保证了蜗杆与电动机输出轴的同轴度,提高了传动精度。
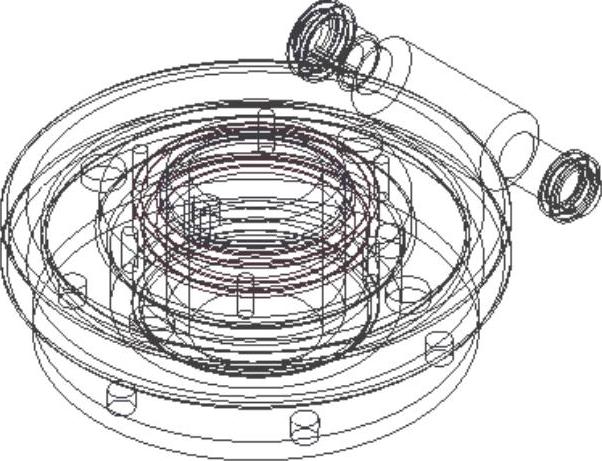
图1-6 下主轴整体结构
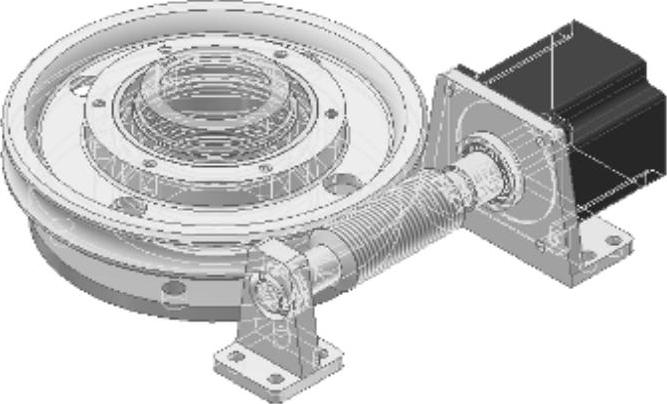
图1-7 电动机支座和下转动部件的三维装配图
整个上俯仰部件是构建在一块与下转动部件连接的基板之上的。采用与下蜗杆后端的支撑处理相似的电动机支座,为了加工方便,在电动机选型上优先考虑俯仰部件带动的负载的起动转矩,将上下电动机及电动机支座统一成一种型号,这样可降低控制电动机的难度。上俯仰部件的三维装配图如图1-8所示。
上蜗轮选用扇形蜗轮,并根据云台的俯仰角度确定扇形的大小。由于蜗轮上置,蜗杆的另一端和上蜗轮轴的支撑就成为了上俯仰部件设计的关键。在上蜗轮轴对应链接的负载是通过两个支撑耳与发射架实现的,因此还要涉及两端轴承的安装和固定。蜗轮轴两端加工成六棱形,如图1-9所示。与发射架支撑耳组装,既使其安装方便,又保证了蜗轮轴与支撑耳所连接的负载运动一致。
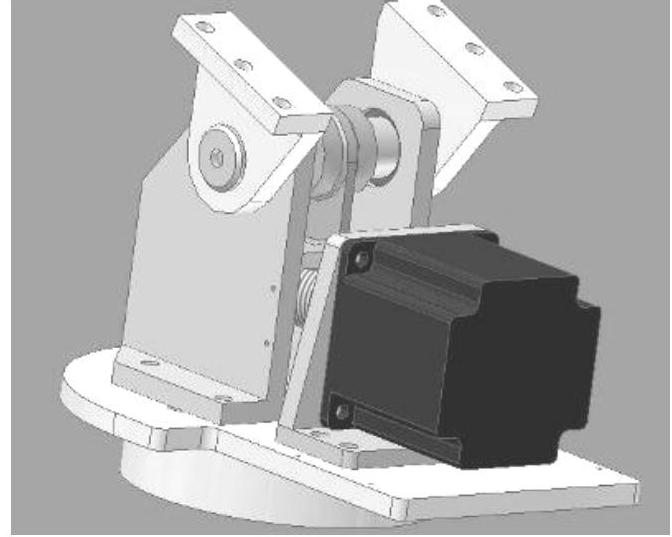
图1-8 上俯仰部件的三维装配图
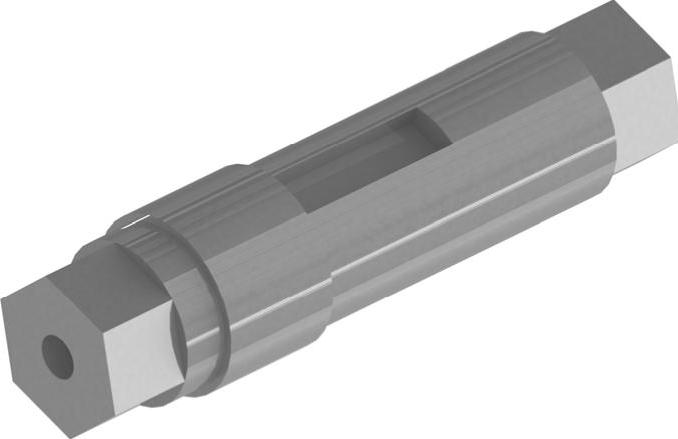
图1-9 蜗轮轴
对于整套机械结构的密封,鉴于机器人的工作环境较为复杂,采用钣金件外壳,这样既为作品增加了美感,又能满足相应的密封要求。从工学美感的角度出发,将下转动部件的钣金罩设计成“前圆后方”,并以下主轴中线分开,便于拆装和加工,下转动部件的钣金件外壳如图1-10所示。对于上俯仰部件,依照部件的形状设计上俯仰部件的壳体,所设计的上俯仰部件的钣金件外壳如图1-11所示。
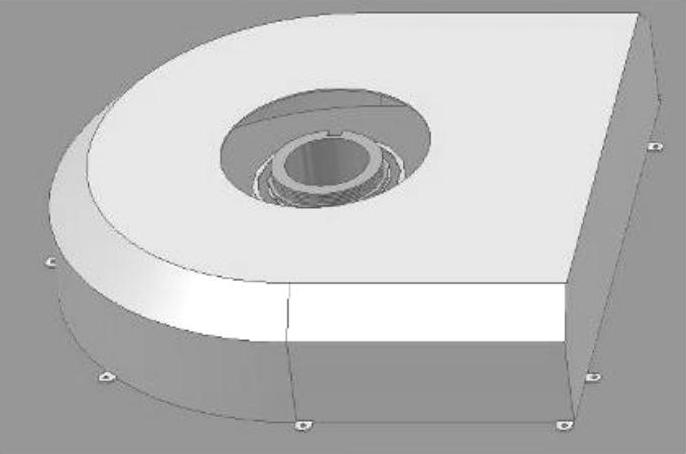
图1-10 下转动部件的钣金件外壳
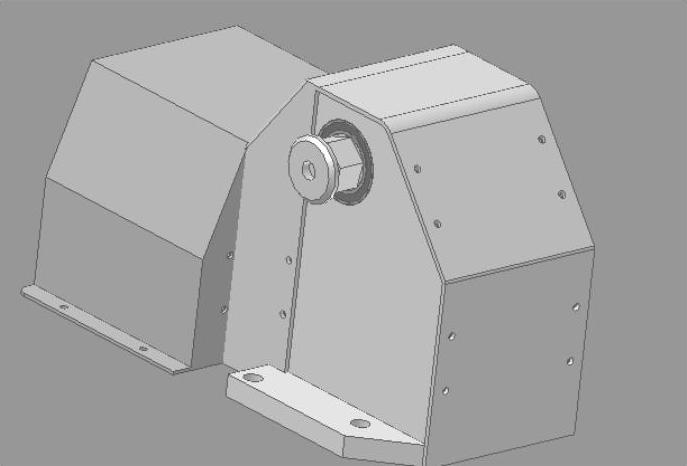
图1-11 上俯仰部件的钣金件外壳
4.负载发射器造型
防暴弹发射器和防暴弹模型的设计、造型与仿真均按有关军用标准进行,采用Pro/E等实体造型软件完成了三维建模和图样绘制工作。图1-12所示为防暴弹发射器的三维造型图。该结构造型不但可以实现相应功能,而且威武雄壮,具有很强的震慑力。集成的发射系统为电触发,后部有电触发装置,前部人工装填,一系列控制指令及电路为成熟技术可直接采用。
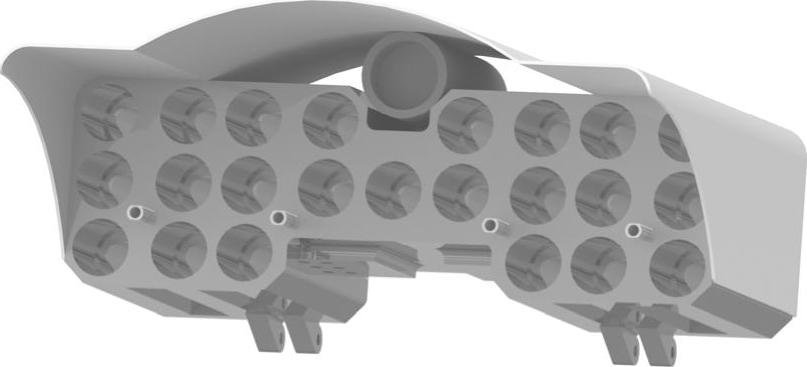
图1-12 防暴弹发射器三维造型图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。