



1.转向系角传动比iw
转向系角传动比是指转向器角传动比i1与转向传动机构的角传动比i2的乘积,可以用方向盘转角增量与同侧转向车轮转角增量之比来表示。
转向系角传动比越大,转向时加在方向盘上的力矩越小,驾驶人的操纵力越小。但为了使车轮偏转一定角度,方向盘需转过的角度就较大,因此转向操纵机构就不够灵敏。据此,选取角传动比时应兼顾转向省力和转向灵敏的要求。机械式转向系要满足此要求比较困难,故普遍采用动力转向系。
2.实现正常转向的条件及转弯半径
为了实现汽车正常转向,避免汽车在转向时产生路面对汽车行驶的附加阻力和轮胎过快磨损,要求转向系能保证在汽车转向时所有车轮均作纯滚动。显然,这只有在所有车轮的轴线都交于一点,且此点为转向中心才能实现。由图9-3可见,设内偏转轮偏转角为β,外偏转轮偏转角为α,在不考虑车轮变形的条件下,前轴左右两车轮的偏转角应该不相等,而且必须是内侧转向车轮的偏转角β,大于外侧转向车轮的偏转角α,其理想关系式为:
式中,B为两侧主销轴线与地面交点之间的距离;L为汽车轴距。转向时,外偏转轮和地面的接触点距转向中心O的距离称为转弯半径。转弯半径越小,汽车转弯时所需的场地越小,机动性越好。当外偏转轮偏转角达到最大值αmax时,转弯半径R最小。最小转弯半径Rmin与αmax的关系为
 (https://www.xing528.com)
(https://www.xing528.com)
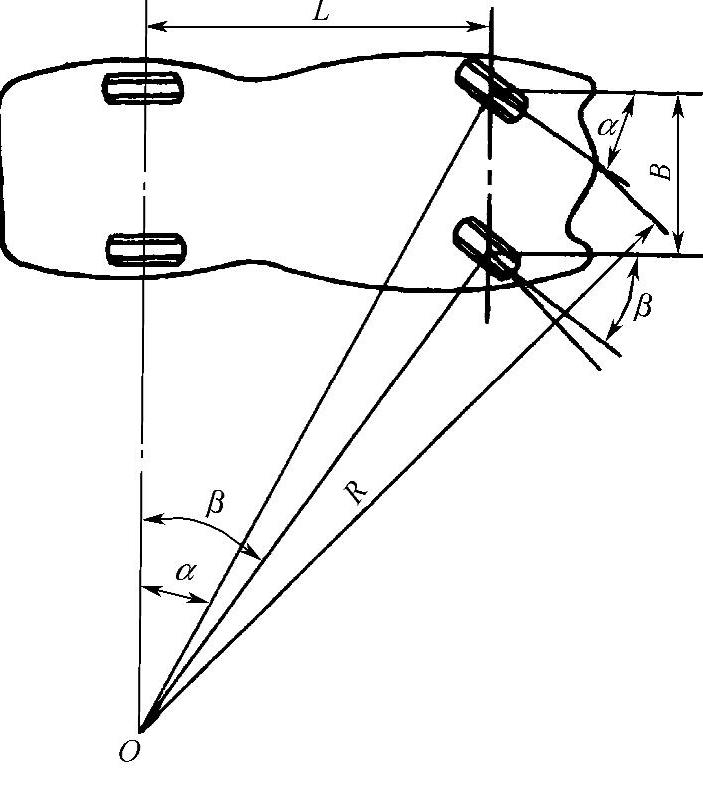
图9-3 汽车转向时理想的两侧转向轮偏转角关系图
3.转向器的传动效率
转向器是转向系的减速传动装置,一般有1~2级减速传动副。转向器的传动效率为转向器的输出功率与输入功率之比。当功率由转向轴输入,由转向摇臂输出时,求得的效率称为正效率。而在传动方向相反时求得的效率为逆效率。逆效率高的转向器称为可逆式转向器。这种转向器有利于汽车转向后的自动回正,但也很容易将坏路面反力经转向传动机构传到方向盘上,发生“打手”情况。逆效率很低的转向器称为不可逆式转向器。不平路面对转向轮的冲击载荷输入到这种转向器中,即由各传动零件承受,而传不到方向盘上。同样,路面作用于车轮的回正力矩也不能传动方向盘上,转向轮不能自动回正。此外,驾驶人不能得到路面的反馈信息,丧失所谓“路感”,无法调节转向力矩。
4.方向盘的自由行程
方向盘在空转阶段的角行程称为方向盘的自由行程。从转向灵敏的角度来说,最好是方向盘和转向节的运动同步进行。然而,这实际上是不可能的。因为在整个转向系中,各传动件之间必然存在装配间隙,而且这些间隙随零件磨损逐渐增大。在开始转动方向盘时,须先消除各传动件间的间隙,所以驾驶人对方向盘施加的力矩很小,方向盘处于空转阶段。方向盘的自由行程对于缓解路面冲击和避免驾驶人的过度紧张有利,但不宜过大,以免影响转向系的灵敏性。一般方向盘从汽车直行的巾间位置向任意方向的自由行程最好不超过10°-15°。当零件磨损严重到方向盘自由行程超过25°-30°时,必须进行调整。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。