



挖掘机电子控制系统的特征主要表现为目的性、相关性、层次性和随机性四个方面。
(1)目的性 挖掘机电子控制系统的目的是解决与挖掘机性能相关的问题,而这些问题仅依靠通常的机械系统是难以解决的。例如:ABS是为了保证挖掘机行驶时的安全性;悬架控制用来改善挖掘机的平顺性、操纵性和稳定性;而动力转向的目的是为了改善停车或低速行驶时的转向力以及保证在高速行驶时的路感。
具体而言,挖掘机电子控制系统主要是为了改善以下基本功能:
①改善乘坐舒适性。良好的乘坐舒适性应该是挖掘机在任何路面行驶时,无论法向和侧向运动,颠簸和冲击都较小,理想的情况是希望获得像乘坐喷气式客机在天空飞行一样舒适。
②挖掘机行驶时的姿态控制。控制挖掘机在转向、制动和加速时的侧倾、纵倾等运动,以保证驾驶员有最舒适的挖掘机水平位置。
③保证有高的操纵性和稳定性。依靠电子控制系统,挖掘机能对驾驶员的操纵及时而正确地给予响应,无论在何种速度下都能保证挖掘机的操纵性和稳定性。此外,挖掘机应不受侧向风或路面不平度的干扰。
④提高行驶能力极限。挖掘机电子控制系统应在任何路面和任何行驶工况下实现最大的轮胎与路面间的牵引力。(https://www.xing528.com)
⑤自适应操纵系统。当作用在挖掘机上的惯性力超过轮胎与路面间的牵引力极限时,控制系统应能自动地给予转向、制动和加速,以避免挖掘机进入危险状态。
(2)相关性 挖掘机上各种电子控制系统往往是相互关联的,如果不考虑这种相关性,任何控制系统都会出现与预期不同的结果。例如挖掘机上的主动悬架,如果不考虑防滑制动系统的行为,就有可能在紧急制动时导致挖掘机的上下起伏和纵向摇摆。这是因为主动悬架对防滑制动系统的波动产生的响应。又如主动悬架可以减小挖掘机侧倾,可是却破坏了四轮转向系统(4WS)的横摆响应。与此同时,若依靠4WS改善横摆响应,则主动悬架的侧倾收敛效果将减弱。
(3)层次性 挖掘机电子控制系统是有层次的,一般可以分成三个层次,如图4-2-4所示。第一层次是车辆综合控制系统。第二层次是各个子系统,如制动控制、转向控制、悬架控制和动力传动控制系统等。而控制系统对前、后、左、右四个车轮制动和悬架装置的控制,发动机控制系统对燃料和空气供给系统的控制等则属于第三层次。如将人—车—环境控制系统看作一个单独的控制层次,这样就成了四个层次。
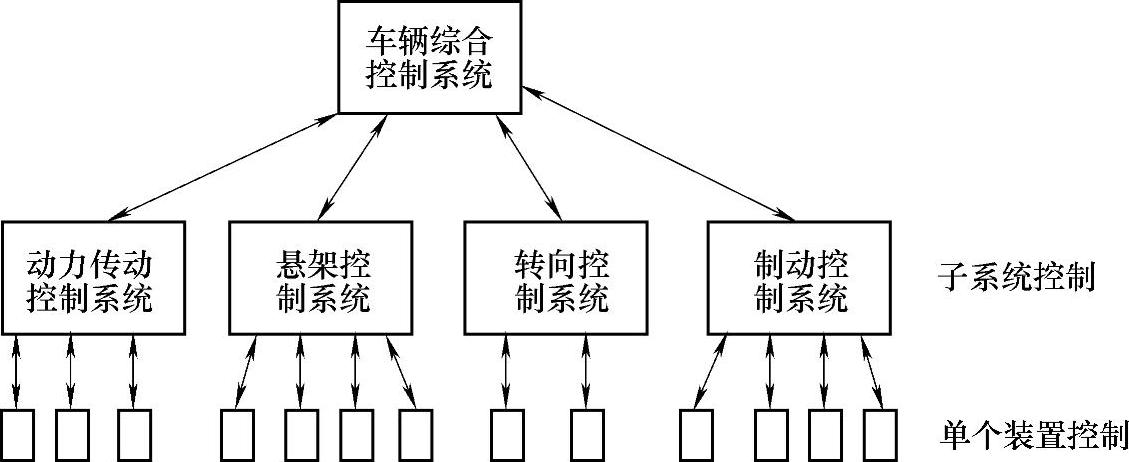
图4-2-4 挖掘机电子控制系统的三个层次
(4)随机性 由于挖掘机在不同的气候环境和道路条件下行驶,而其行驶工况又是动态变化的,因而作为一个系统,是动态的、不确定的或随机的。例如:若某一控制系统是为特定的载荷工况和道路条件设计的,那么在动负荷和路面不平度变化时,该悬架控制系统就不能保证挖掘机获得良好性能。因此,挖掘机电子控制系统必须能适应外界条件的随机变化。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。