



1.混合动力系统的工作原理
混合动力系统使用发动机和MG2提供的原动力,并主要将MG1作为发电机使用。该系统根据不同的驾驶条件优化组合这些动力。
混合动力车辆控制ECU持续监视HV蓄电池充电状态(SOC)、HV蓄电池温度、冷却液温度和电气负载状态。如果READY指示灯点亮且变速杆置于P、R、D或B位置时任一监视项目无法满足要求,或者在车辆倒档行驶时,混合动力车辆控制ECU要求起动发动机以驱动MG1,对HV蓄电池充电。
根据不同的驾驶条件,混合动力系统优化组合发动机、MG1和MG2操作以驱动车辆,如图2-37所示。
(1)怎样阅读列线图
下面的列线图对行星轮的旋转方向、转速和转矩平衡作出了直观表示。
在图2-38所示的列线图中,直线用于表示行星轮中3个齿轮的旋转方向、转速之间的关系。转速由距0点的距离表示。由于行星轮的结构,3个齿轮的转速之间的关系总是为一条直线。
以下所示的各车辆驾驶条件下的传动机构的工作情况图和列线图仅为示例。
在混合动力系统中,电机在不同工况下所具有的作用是不同的。了解在不同工况下传动机构的旋转方向和转矩之间的关系,有助于理解电机的作用。表2-3表明了正转矩或负转矩和正向旋转或反向旋转进行不同组合时驱动和发电的关系。
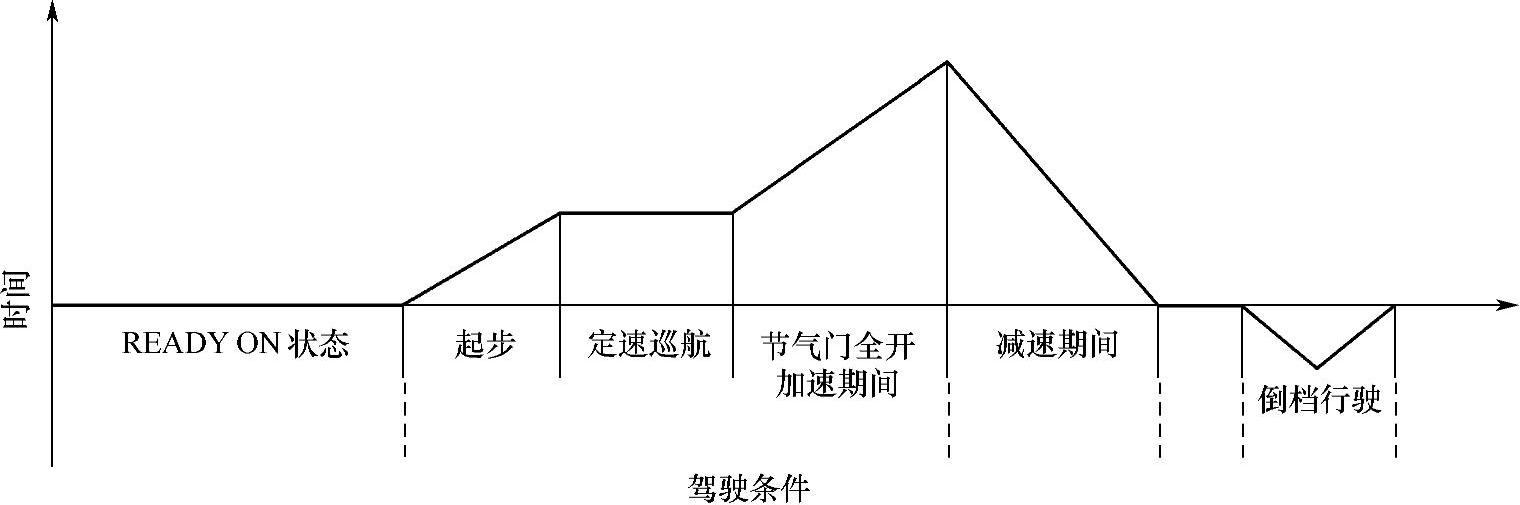
图2-37 驾驶条件与混合动力系统的工作过程
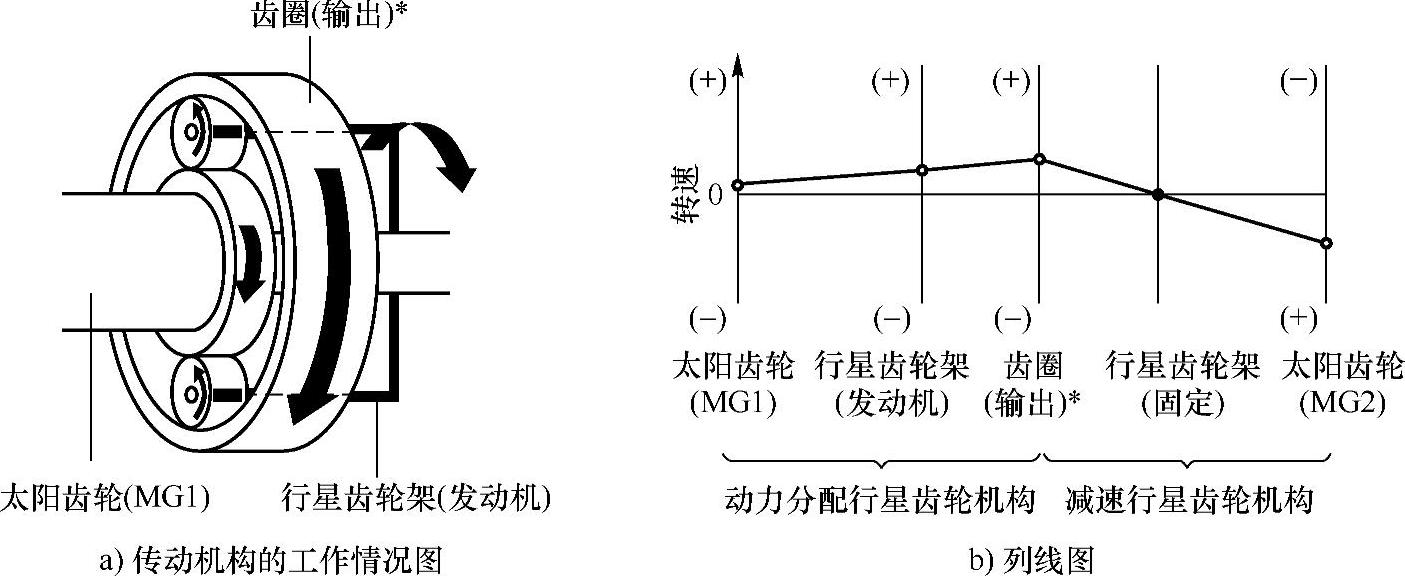
图2-38 传动机构的工作情况图和列线图
表2-3 传动机构的旋转方向和转矩之间的关系

由表可归纳为:
正(正向旋转)正(正转矩)或反(反向旋转)负(负转矩)为驱动;
正(正向旋转)负(负转矩)或反(反向旋转)正(正转矩)为发电。
(2)READY ON状态
①发动机起动。当READY指示灯点亮且变速杆在P位时,由混合动力车辆控制ECU监视发动机冷却液温度、SOC、蓄电池温度和电气负载等指标,如果指示需要起动发动机,则混合动力车辆控制ECU将激活MG1以起动发动机,如图2-39所示。此时的传动机构的工作情况图和列线图如图2-40所示。
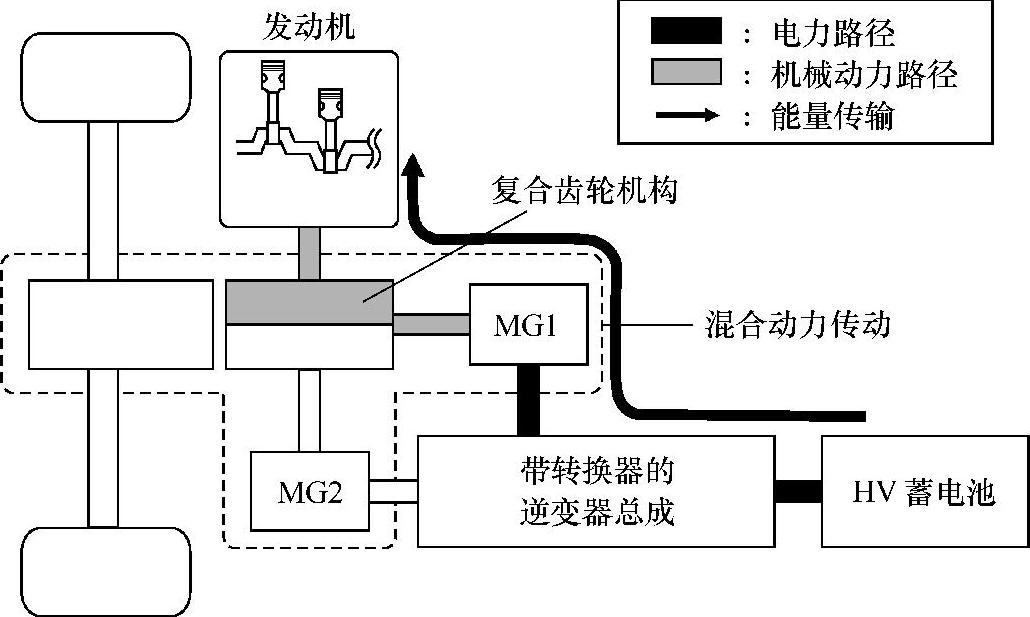
图2-39 MG起动发动机
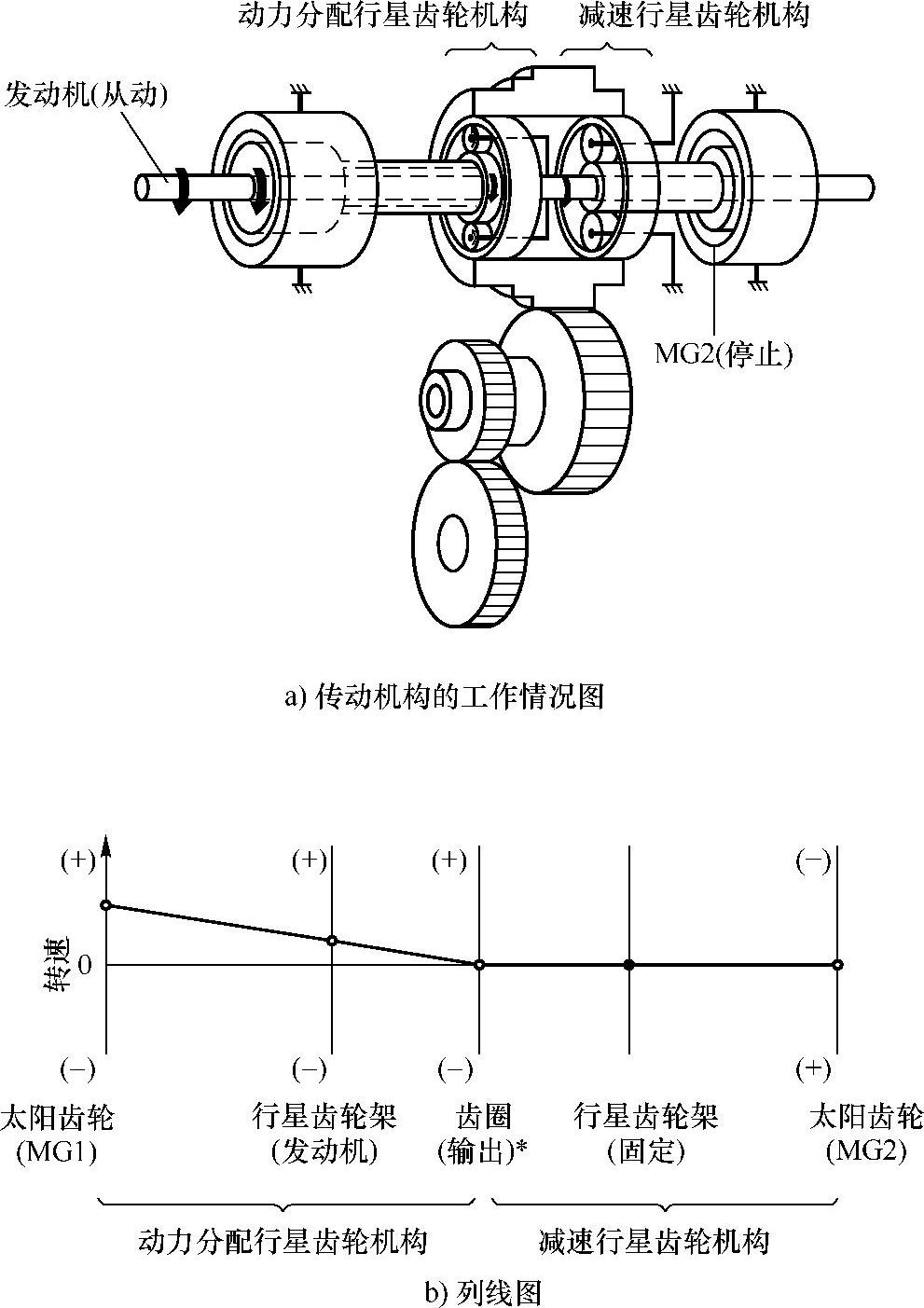
图2-40 传动机构的工作情况图和列线图
发动机起动时,为防止MG1太阳齿轮的反作用力旋转齿圈和驱动驱动轮,将施加电流至MG2以防止其旋转,该功能被称为“反作用控制”。
②发动机驱动MG1向HV蓄电池充电。当发动机起动后,运转的发动机使MG1作为发电机运行,并开始对HV蓄电池充电,如图2-41所示。此时的传动机构的工作情况图和列线图如图2-42所示。
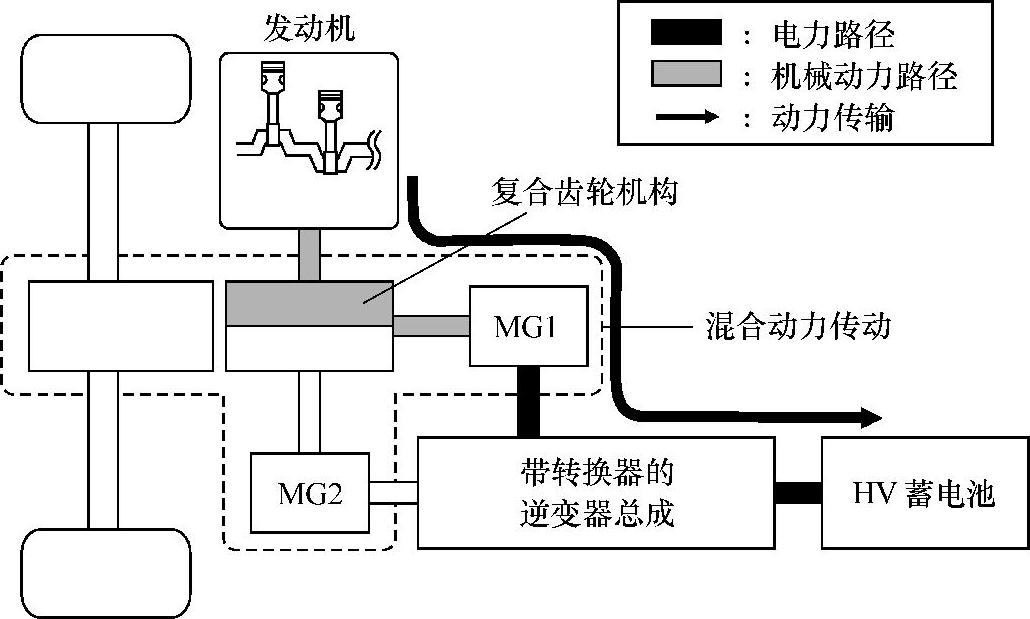
图2-41 发动机驱动MG1向HV蓄电池充电
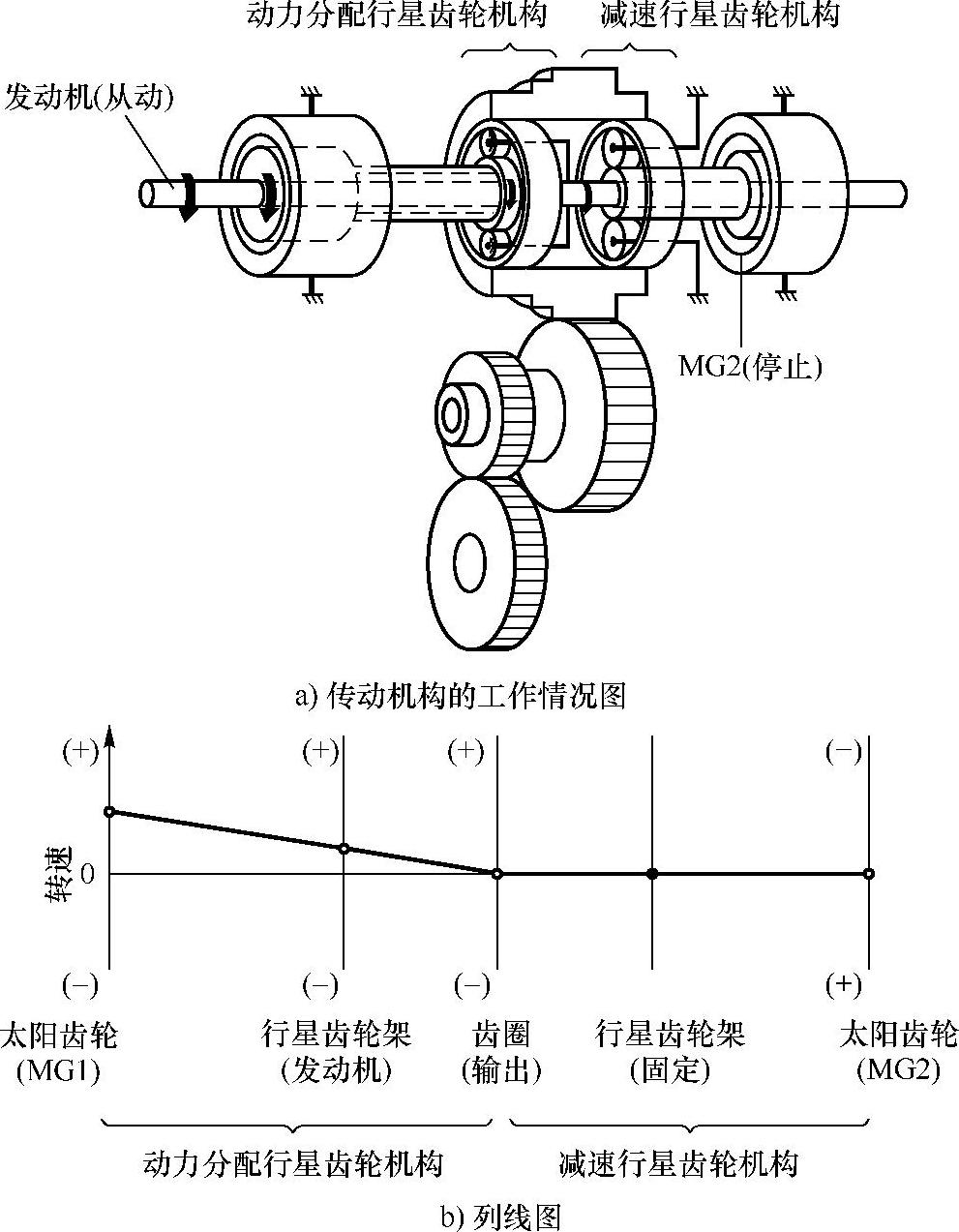
图2-42 传动机构的工作情况图和列线图(发动机驱动MG1向HV蓄电池充电)
(3)车辆起步
当车辆起步时,由MG2为车辆提供动力,如图2-43a所示。在正常情况下单独由MG2提供动力,即完全可以满足车辆起步所需动力;在非正常情况下,车辆驱动转矩需要增加时,混合动力车辆控制ECU激活MG1以起动发动机为车辆增加转矩,如图2-43b所示。
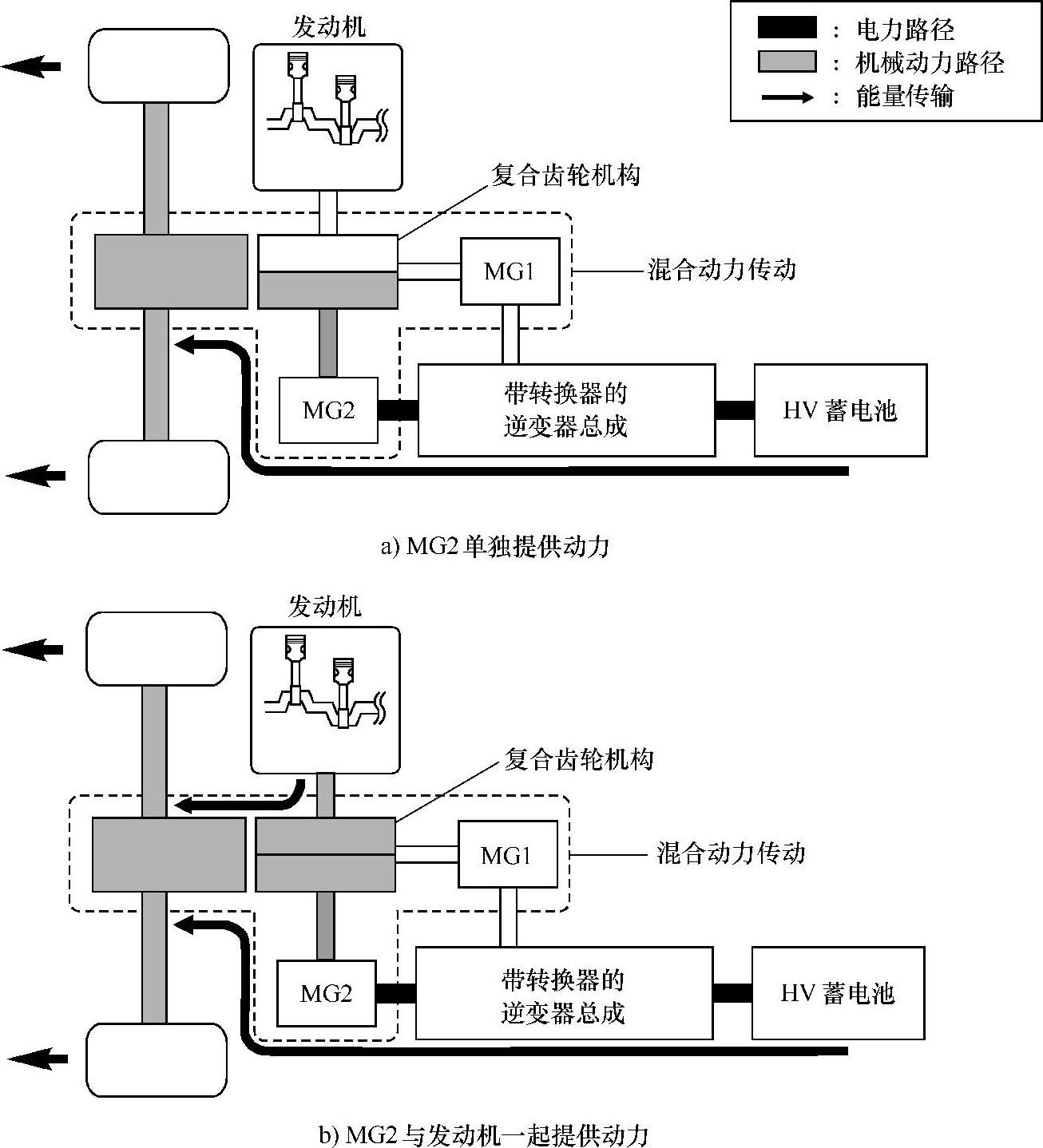
图2-43 车辆起步的工作状态
车辆在正常情况下起步时使用MG2的原动力行驶,此时传动机构的工作情况图和列线图如图2-44所示。在这一情况下行驶时,由于发动机停止,行星齿轮架(发动机)的转速为0。此外,由于MG1未产生任何转矩,因此没有转矩作用于太阳齿轮(MG1)。然而,太阳齿轮沿(-)方向自由旋转以平衡旋转的齿圈。
(4)定速巡航
车辆在低负载和定速巡航状态下行驶时,动力分配行星齿轮机构传输发动机原动力:一部分原动力将直接输出;其余部分将通过MG1发电,如图2-45所示。通过使用逆变器的电力路径,将该电力传输至MG2,并作为MG2的原动力输出。如果HV蓄电池的SOC水平低,则发动机驱动MG1对其充电。
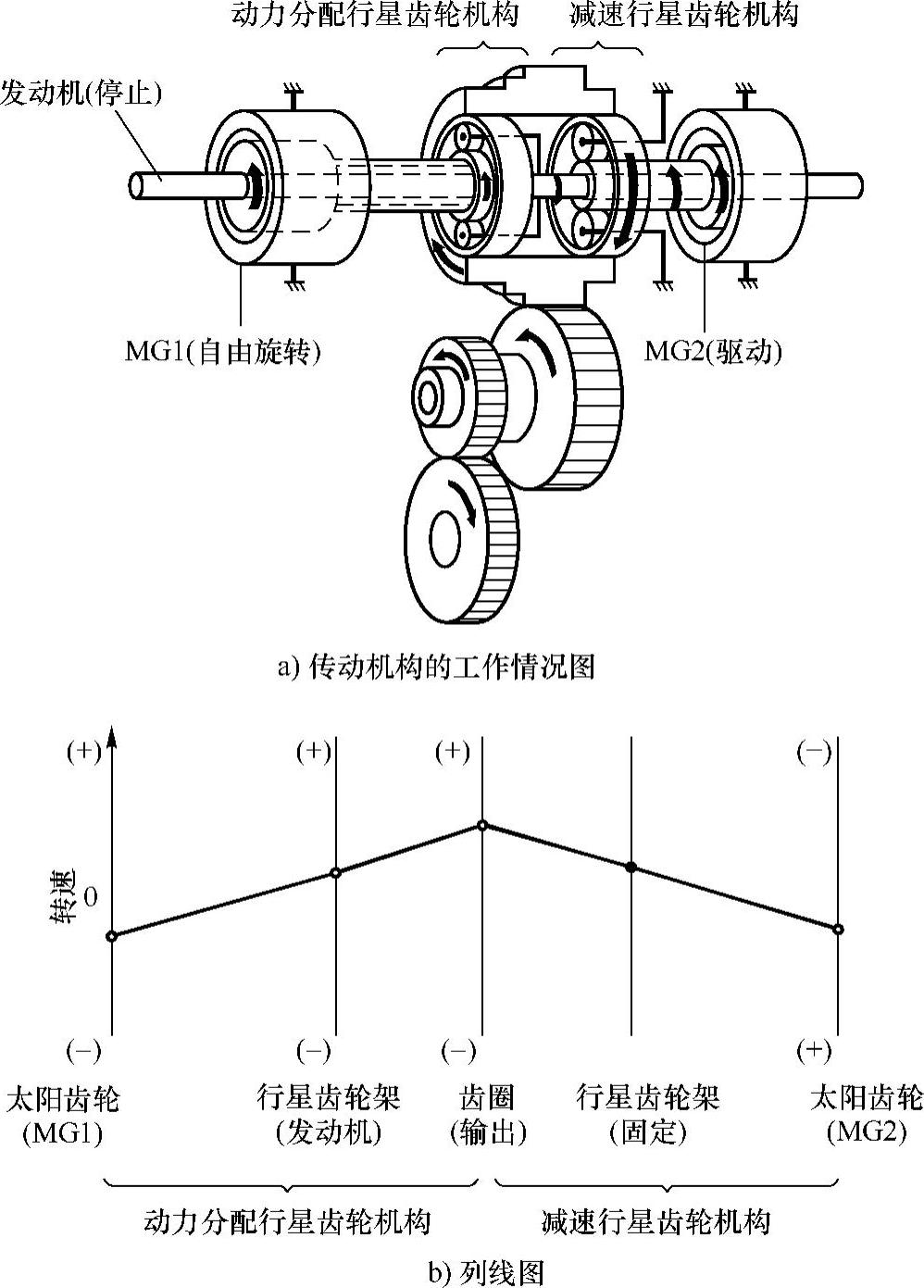
图2-44 传动机构的工作情况图和列线图(车辆起步)
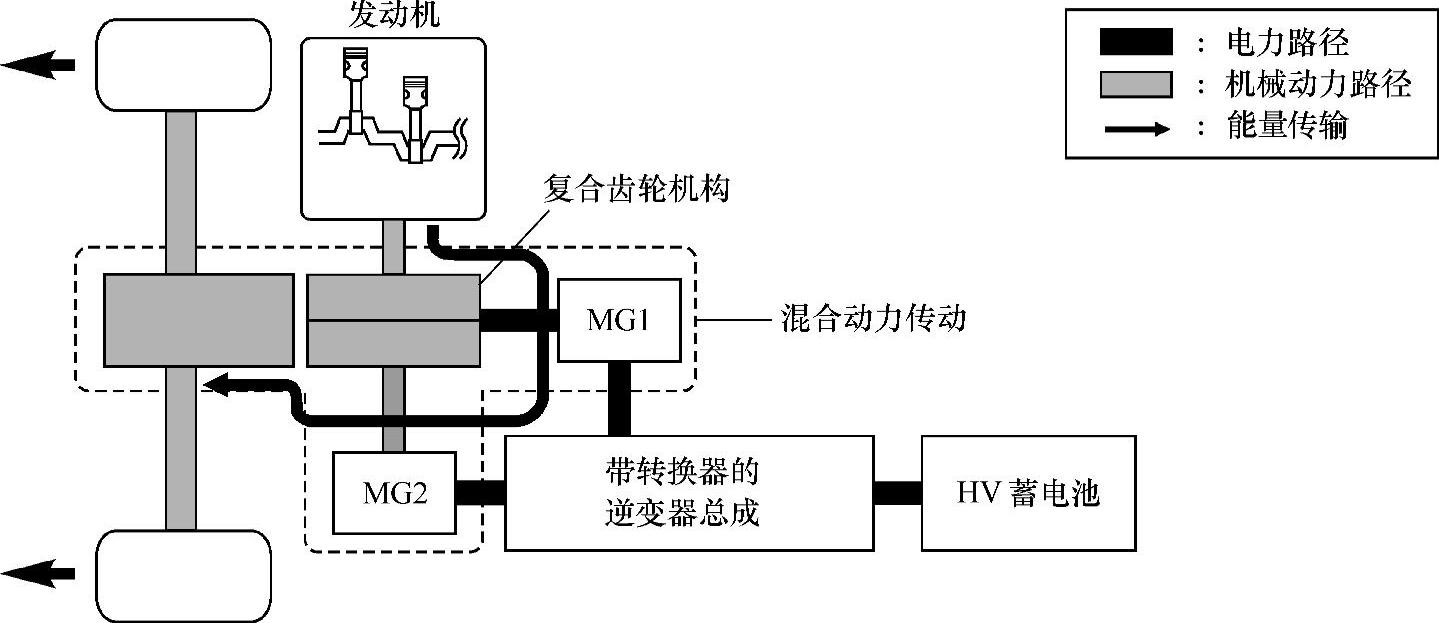
图2-45 定速巡航的工作状态
车辆定速巡航时的传动机构的工作情况图和列线图如图2-46所示。来自发动机的转矩沿(+)方向作用在行星齿轮架(发动机)上,使太阳齿轮(MG1)以负转矩作出反应。MG1通过利用作用于太阳齿轮(MG1)上的负转矩来发电。
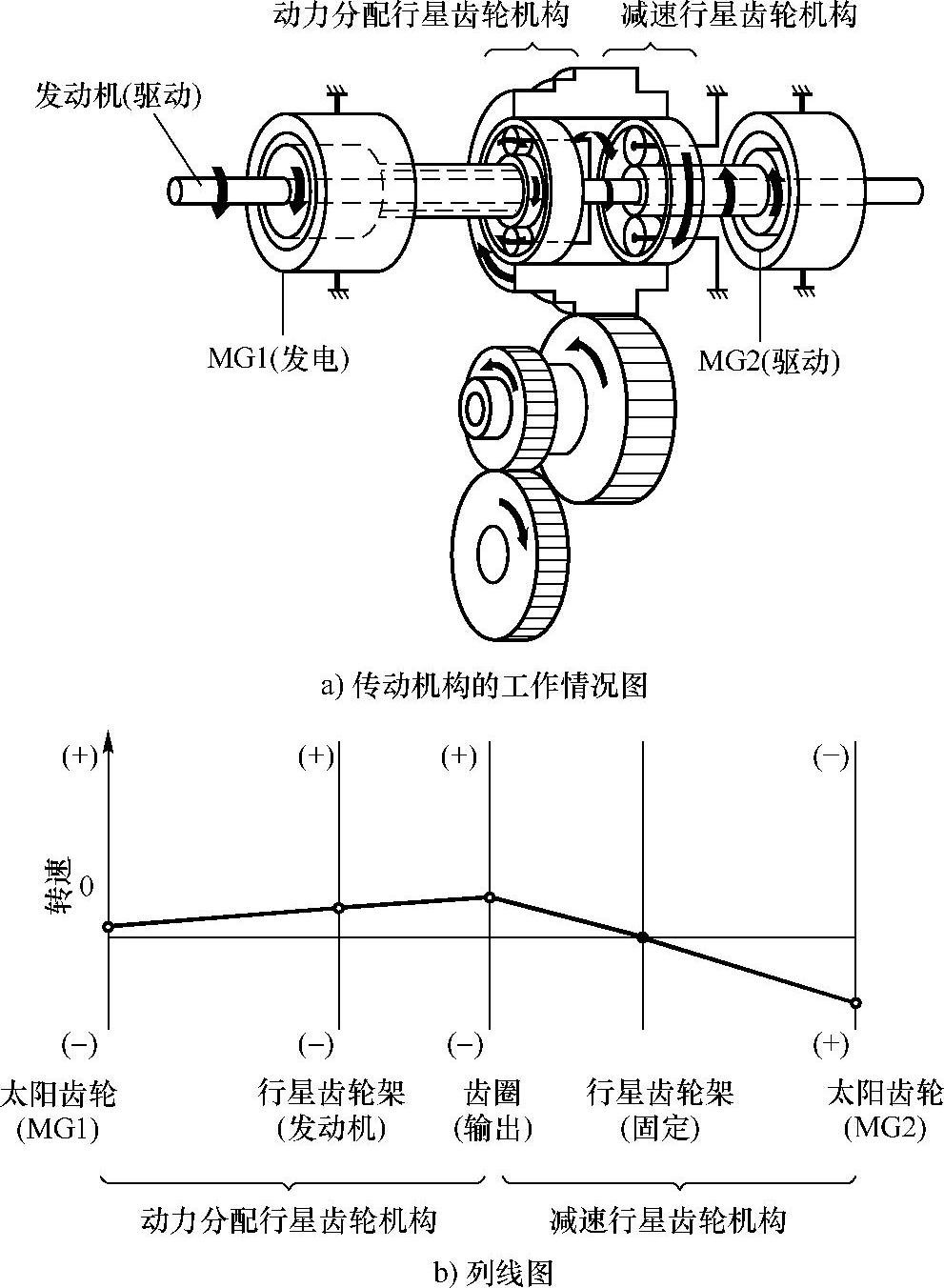
图2-46 传动机构的工作情况图和列线图(定速巡航)
(5)节气门全开加速期间
车辆行驶状态从低负载巡航变为节气门全开加速时,系统用来自HV蓄电池的电力为MG2补充原动力,如图2-47所示。
节气门全开加速期间传动机构的工作情况图和列线图如图2-48所示。来自发动机的转矩沿(+)方向作用在行星齿轮架(发动机)上,使太阳齿轮(MG1)以负转矩作出反应。MG1通过利用作用于太阳齿轮(MG1)上的负转矩来发电。
(6)减速期间
车辆在变速杆置于D位的状态下减速时,发动机停止且原动力变为零。这时,车轮驱动MG2,使MG2作为发电机运行并对HV蓄电池充电,如图2-49所示。如果车辆在较高车速时减速,则发动机将不停止且保持预定转速,以保护行星轮。
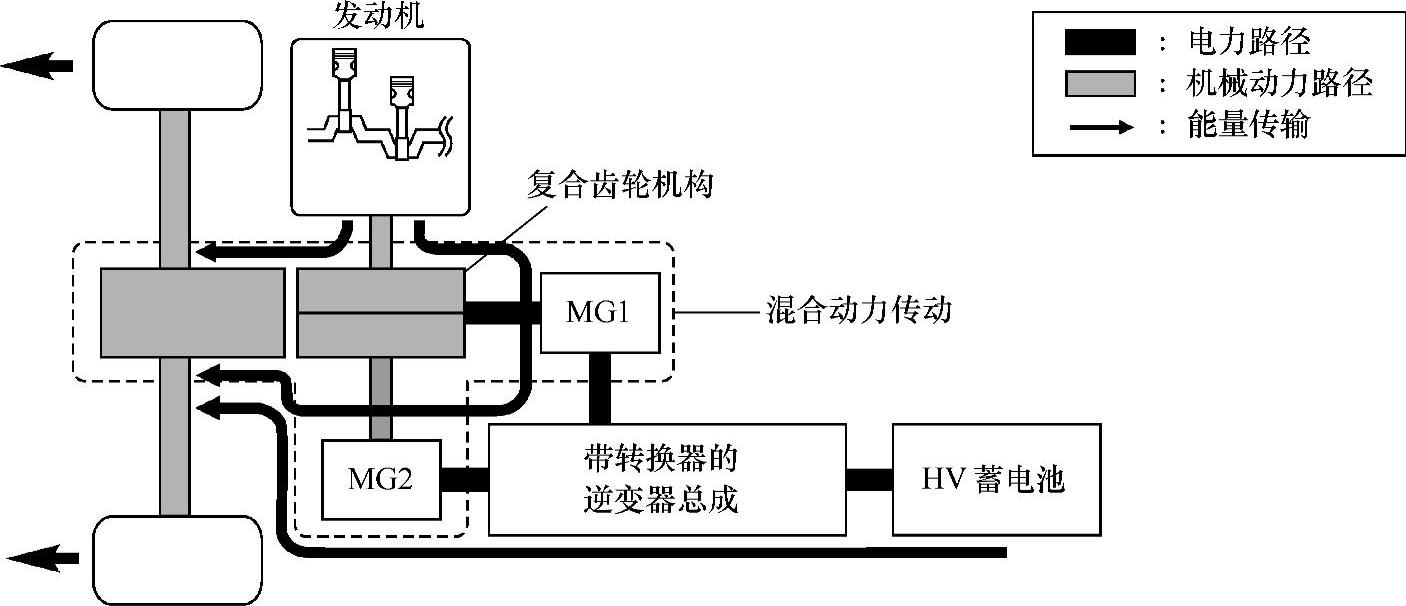
图2-47 节气门全开加速期间的工作状态
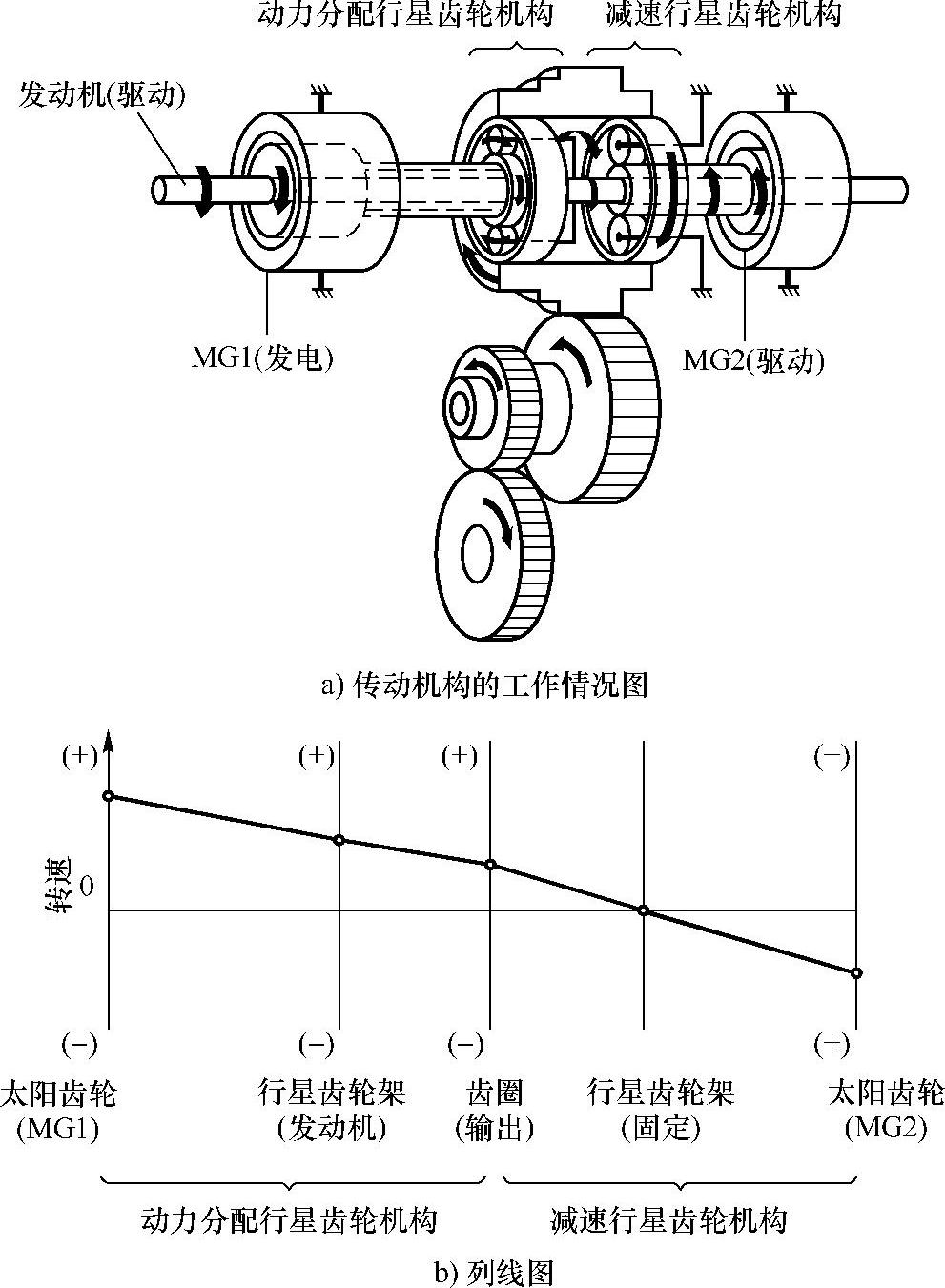
图2-48 传动机构的工作情况图和列线图(节气门全开加速)
减速期间,齿圈由车轮带动旋转,此时的传动机构的工作情况图和列线图如图2-50所示。在此情况下,由于发动机停止,行星齿轮架(发动机)的转速为0。此外,由于MG1未产生任何转矩,因此没有转矩作用于太阳齿轮(MG1)。然而,太阳齿轮(MG1)沿(-)方向自由旋转以平衡旋转的齿圈。
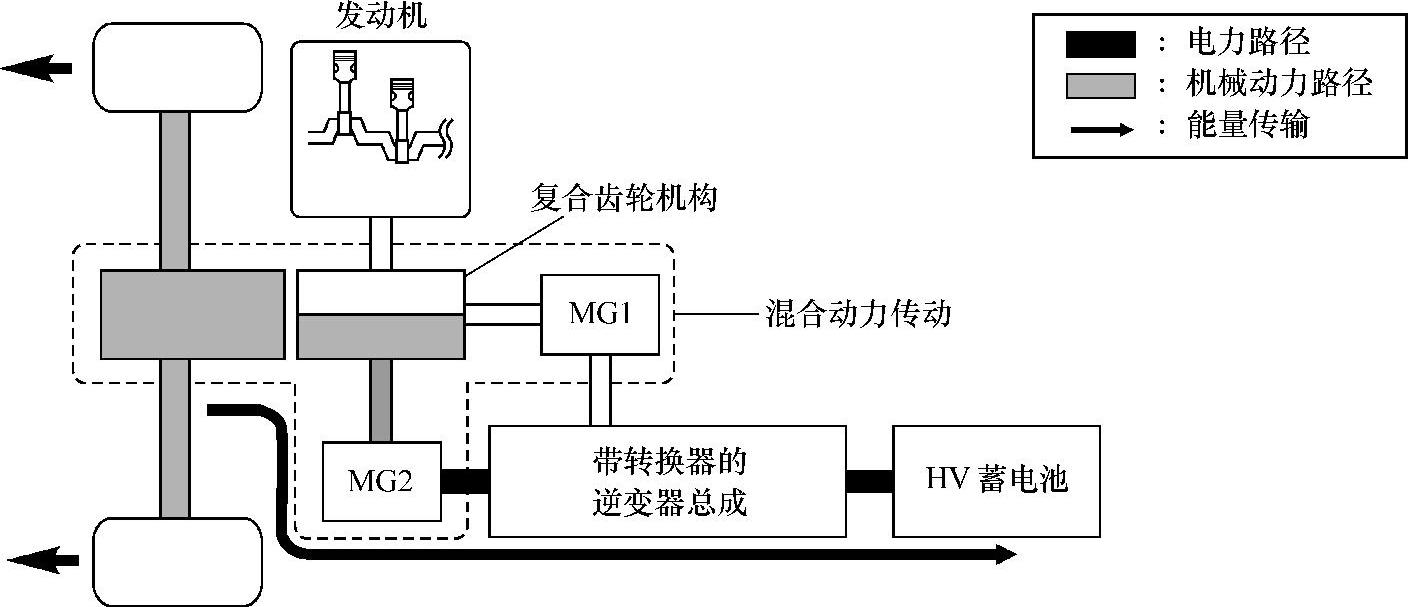
图2-49 减速期间的工作状态
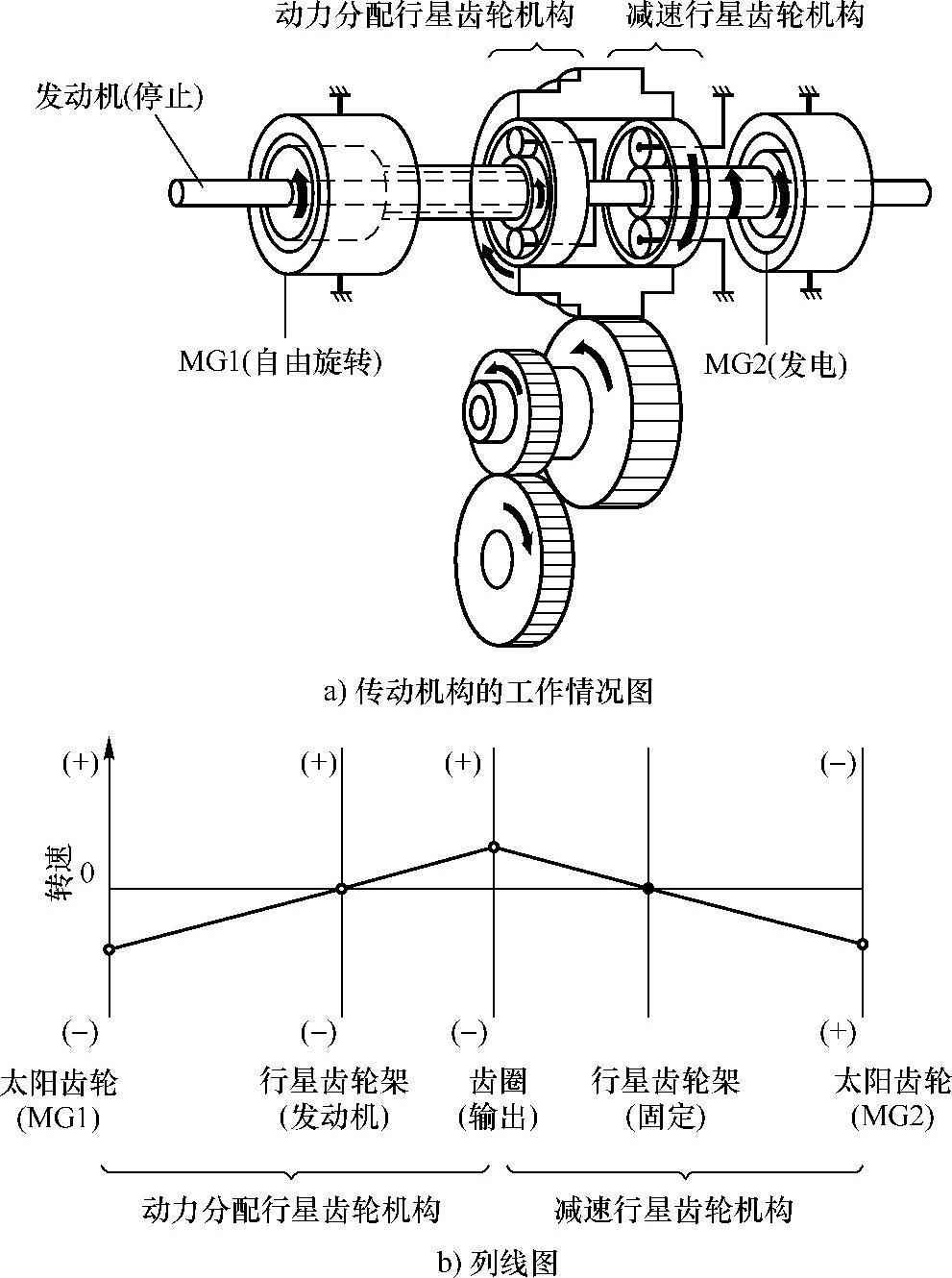
图2-50 传动机构的工作情况图和列线图(减速期间)
(7)倒档期间
车辆倒档行驶时,由MG2提供所需动力,如图2-51所示。此时,MG2沿相反方向旋转,发动机保持停止,而MG1则沿正常方向旋转但不发电。
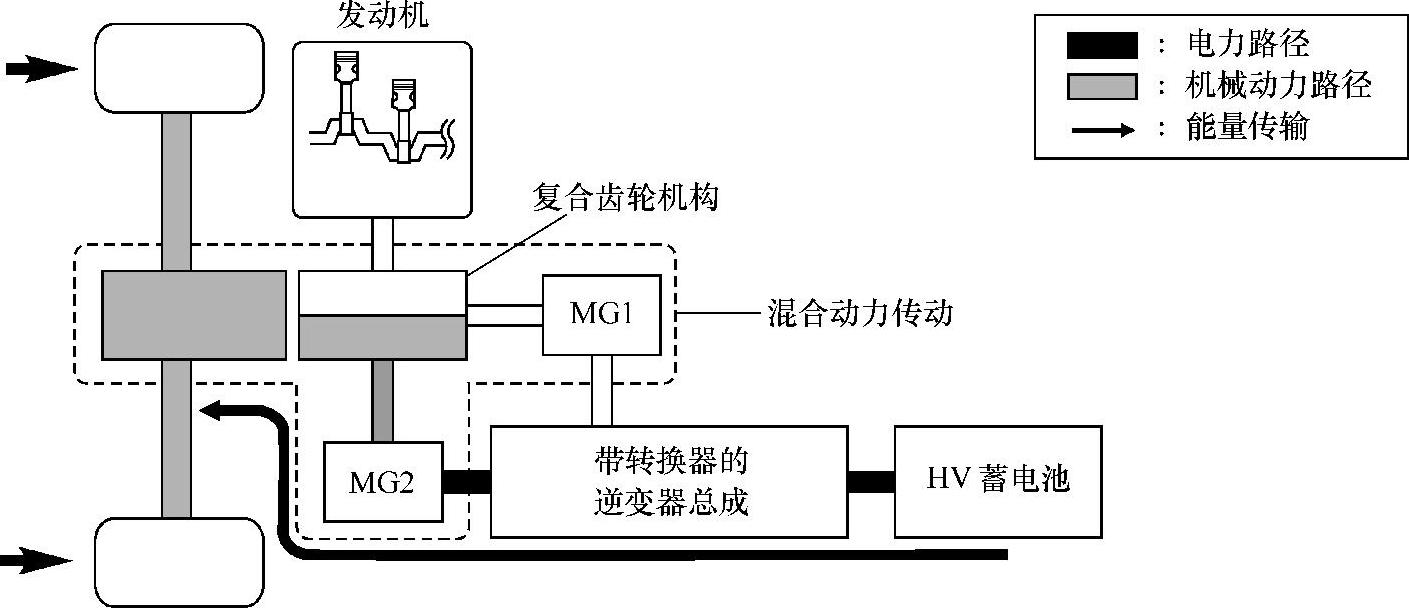
图2-51 倒档期间的工作状态
倒档期间的传动机构的工作情况图和列线图如图2-52所示。行星齿轮的状态与“起步”中描述的相反。由于发动机停止,行星齿轮架(发动机)的转速为0,但太阳齿轮(MG1)沿(+)方向自由旋转以平衡齿圈的旋转。
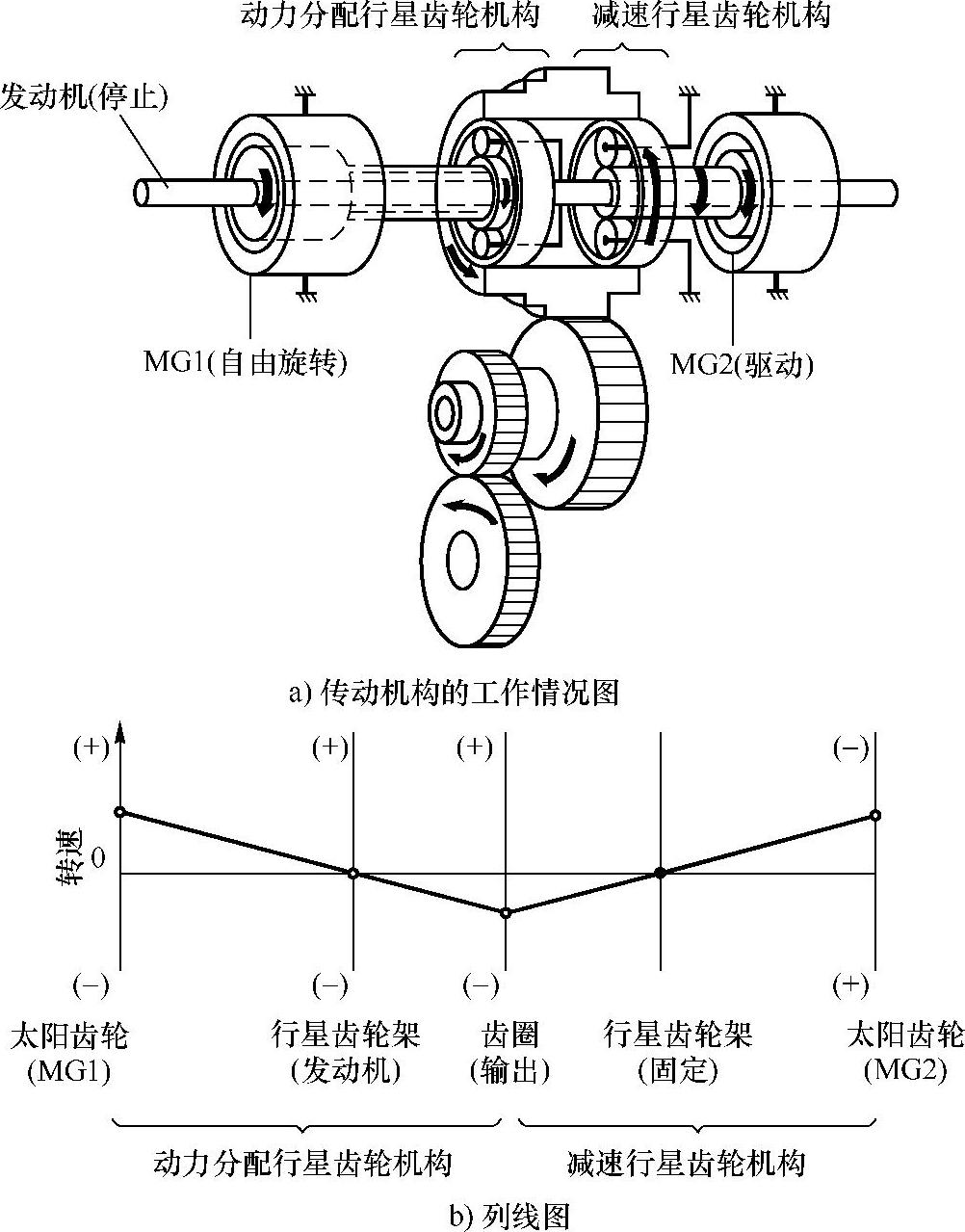
图2-52 传动机构的工作情况图和列线图(倒档)
2.混合动力系统的控制原理
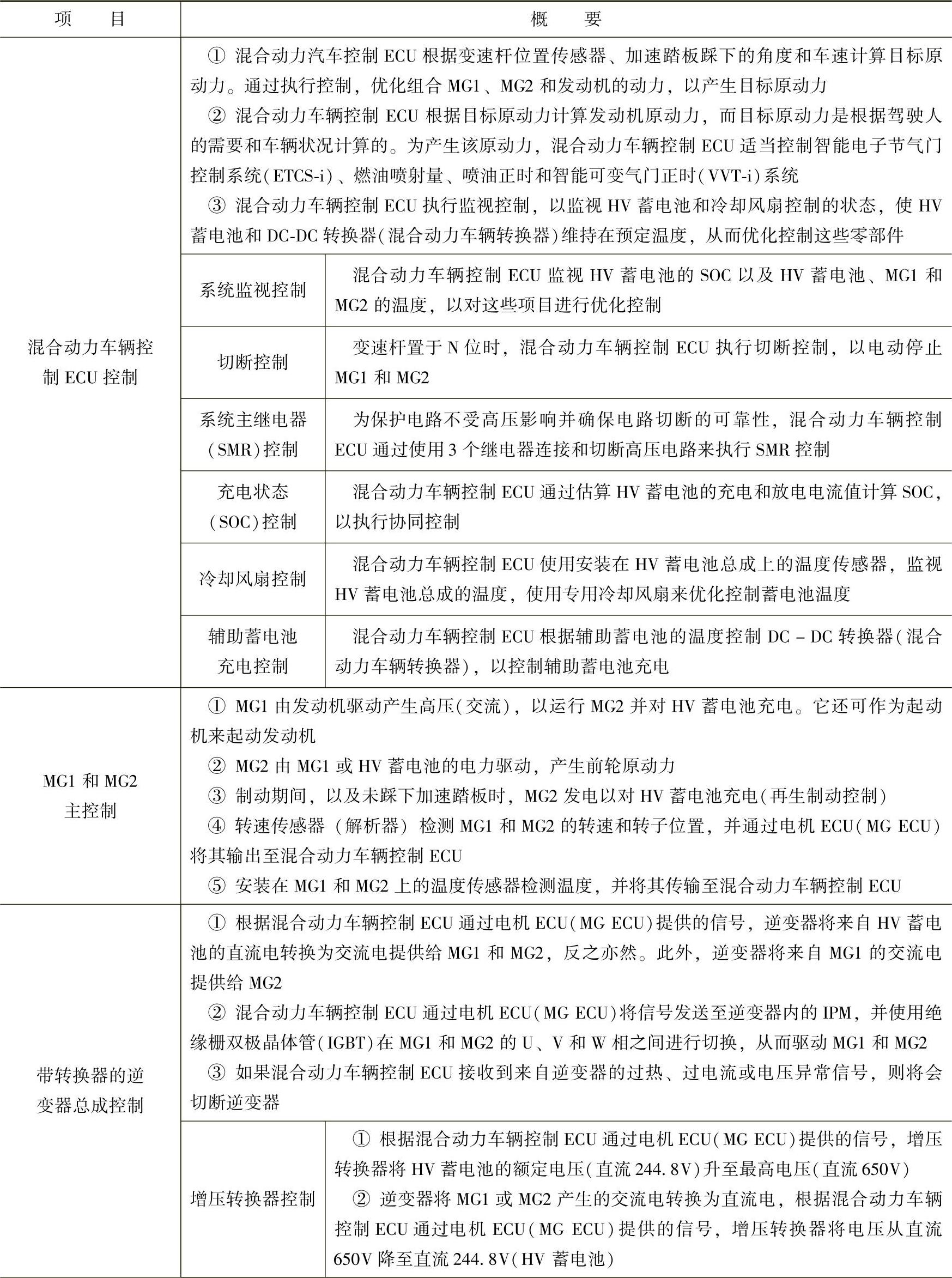
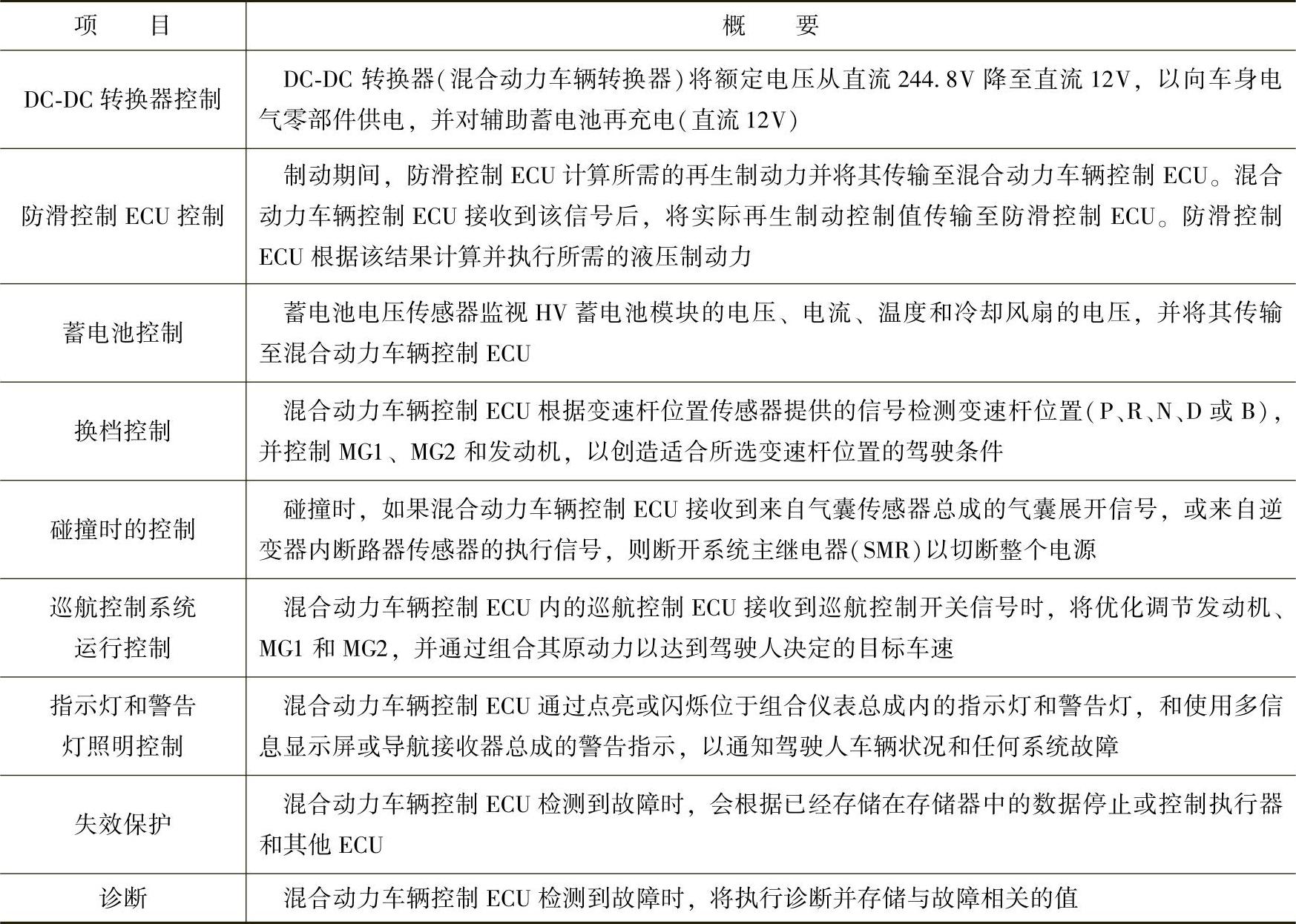
凯美瑞混合动力系统可以完成的控制内容,见表2-4。
表2-4 凯美瑞混合动力系统的控制内容
(续)
(1)凯美瑞混合动力系统控制原理框图
车内丰田混合动力系统-Ⅱ(THS-Ⅱ)的配置情况如图2-53所示。
(2)混合动力车辆控制ECU
混合动力车辆控制ECU根据来自加速踏板位置传感器的信号计算踩下加速踏板的量,接收来自MG2解析器的车速信号,并检测来自变速杆位置传感器的信号,确定变速杆位置。混合动力车辆控制ECU根据这些信息判断车辆的工作情况,并对MG1、MG2和发动机的原动力进行优化控制。此外,混合动力车辆控制ECU对MG1、MG2和发动机的输出功率和转矩进行优化控制,从而实现更低的燃油消耗和更清洁的废气排放。
混合动力车辆控制ECU根据计算出的目标原动力以及HV蓄电池的SOC和温度计算发动机原动力,其计算流程如图2-54所示。目标原动力减去发动机原动力所得的值即为MG2原动力。
混合动力车辆控制ECU通过执行ETCS-i控制、燃油喷射量控制、喷油正时控制和VVT-i系统控制,达到所需的发动机原动力。(https://www.xing528.com)
①混合动力车辆控制ECU控制系统框图。混合动力车辆控制ECU控制系统框图如图2-55所示。
②系统监视控制。混合动力车辆控制ECU持续监视HV蓄电池的充电状态(SOC)。当SOC过低时,混合动力车辆控制ECU提高发动机的输出功率,使MG1运行以对HV蓄电池充电。发动机停止时,MG1运行以起动发动机,然后发动机使MG1运行以对HV蓄电池充电。
如果SOC低或HV蓄电池模块、MG1或MG2的温度高于规定值,则混合动力车辆控制ECU限制施加到驱动轮的原动力大小,直至温度或SOC恢复到正常值。
③切断控制。变速杆在N位时,切断MG1和MG2的机械连接。这是由于MG2与前轮机械相连,因此必须电动停止MG1和MG2来切断原动力。
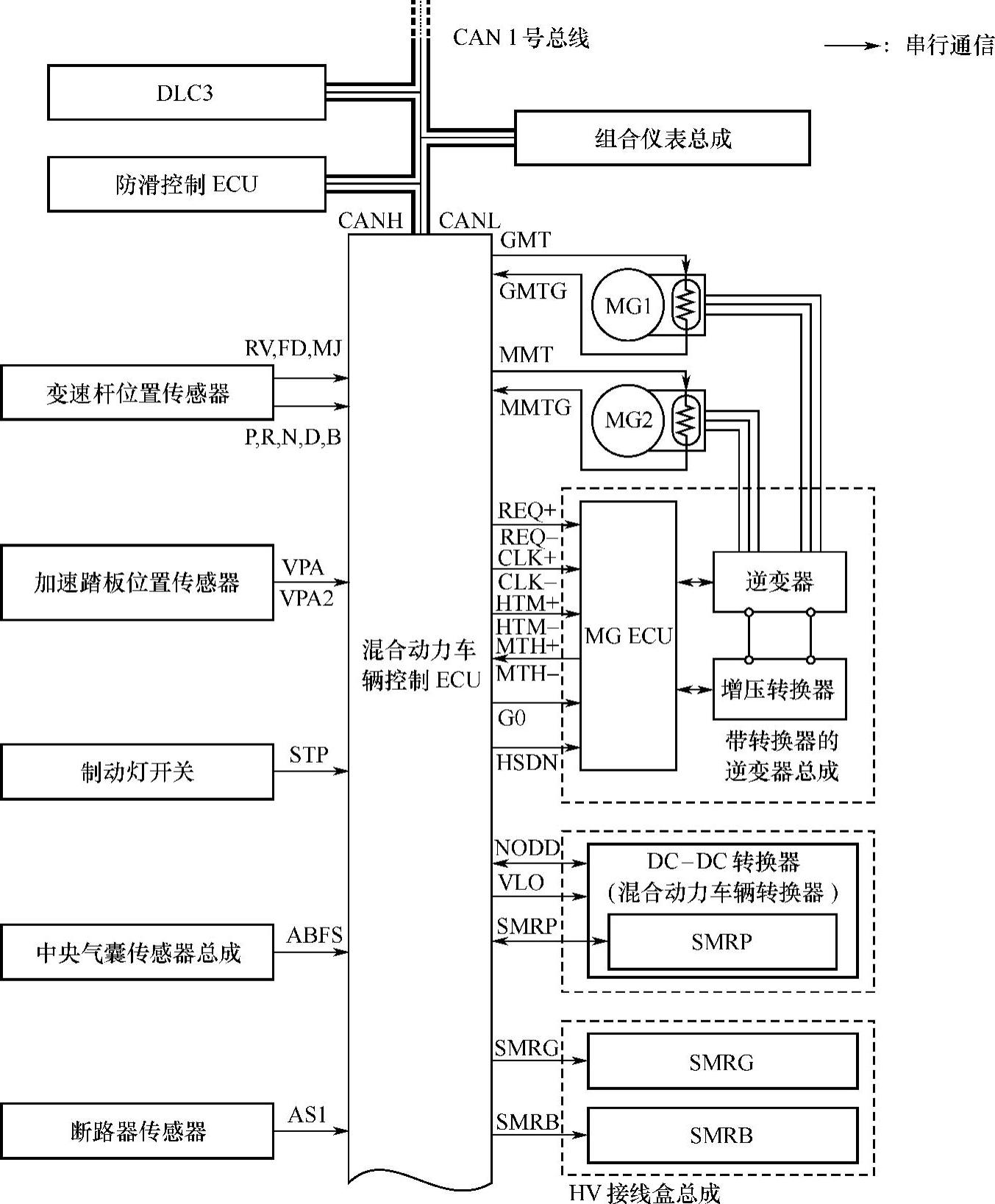
图2-53 车内丰田混合动力系统-Ⅱ(THS-Ⅱ)的配置情况(1)
④系统主继电器(SMR)控制。接收到来自混合动力车辆控制ECU的指令后,SMR继电器连接并断开高压电路电源。它共使用3个继电器:1个(SMRB)用于正极侧,2个(SMRP和SMRG)用于负极侧。负极侧的1个继电器(SMRP)是集成于DC-DC转换器(混合动力车辆转换器)内的半导体继电器。其他2个是安装在HV蓄电池总成内HV接线盒总成上的触点型继电器。系统主继电器(SMR)控制系统原理框图如图2-56所示。
a.电源接通:首先,混合动力车辆控制ECU接通SMRB,然后接通SMRP。混合动力车辆控制ECU在接通SMRG后,断开SMRP。电流首先经过电阻器,以这种方式对其进行控制,从而保护了电路中的触点,避免其因浪涌电流而受损。继电器(SMR)电源接通原理如图2-57所示。
b.电源切断:首先,混合动力车辆控制ECU断开SMRG,判定SMRG的触点是否烧结后,断开SMRB;然后,混合动力车辆控制ECU接通,SMRP用来判定SMRB的触点是否烧结,接着断开SMRP。继电器(SMR)电源切断原理如图2-58所示。
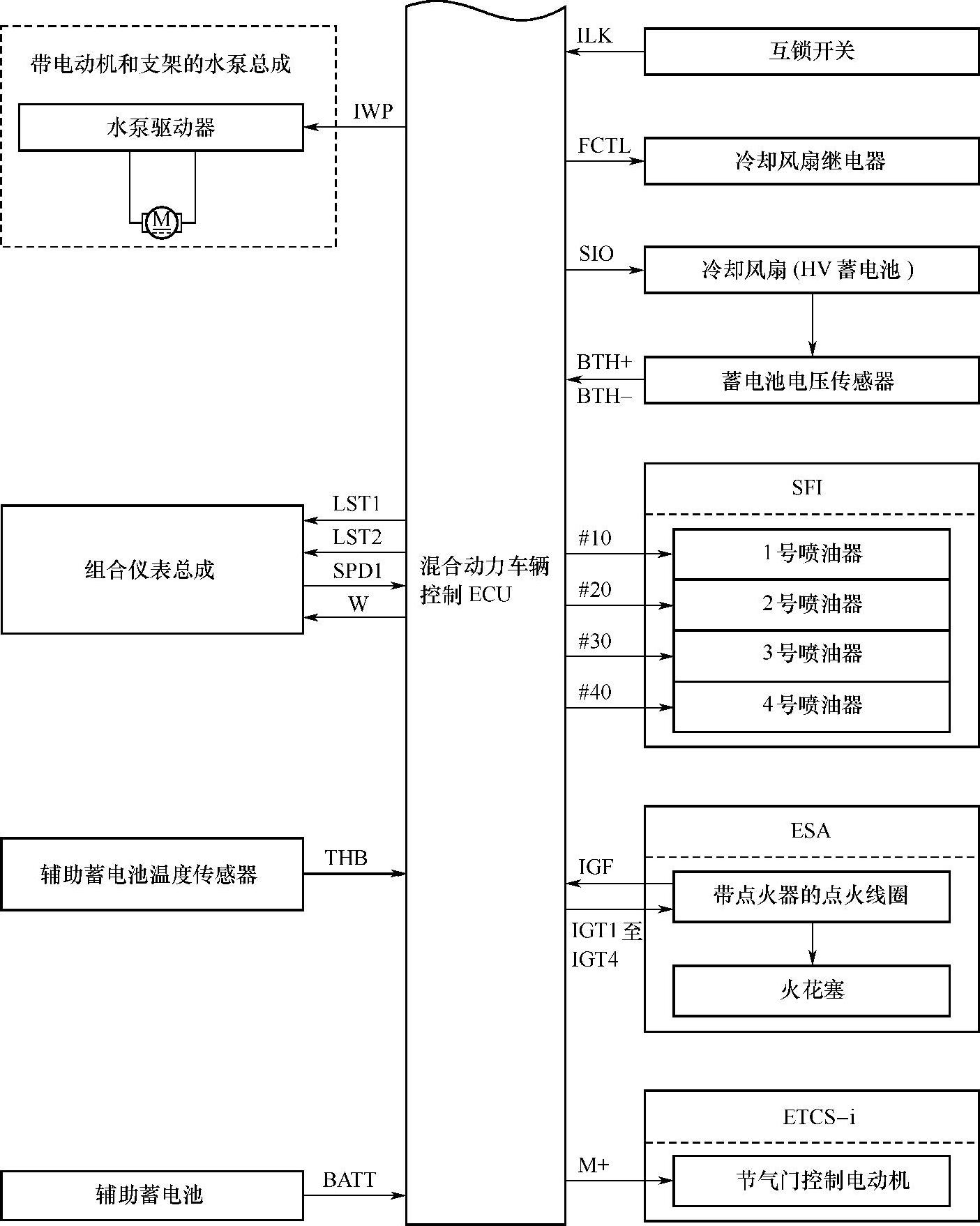
图2-53 车内丰田混合动力系统-Ⅱ(THS-Ⅱ)的配置情况(2)
如果混合动力车辆控制ECU检测到触点烧结,则点亮主警告灯,并在多信息显示屏上显示警告信息,然后将诊断故障码(DTC)存储在存储器中。
⑤充电状态(SOC)控制。混合动力车辆控制ECU通过估算HV蓄电池的充电和放电电流值计算其充电状态(SOC),以控制SOC,如图2-59所示。混合动力车辆控制ECU根据蓄电池内存储的电力作出控制决定。
车辆行驶过程中,HV蓄电池重复进行充电/放电循环,因为加速过程中对MG2供电,减速过程中再生制动对其充电。混合动力车辆控制ECU根据电流传感器检测的HV蓄电池充电量/放电量计算SOC。混合动力车辆控制ECU根据计算出的SOC值持续执行充电/放电控制,以使SOC保持在目标范围内。
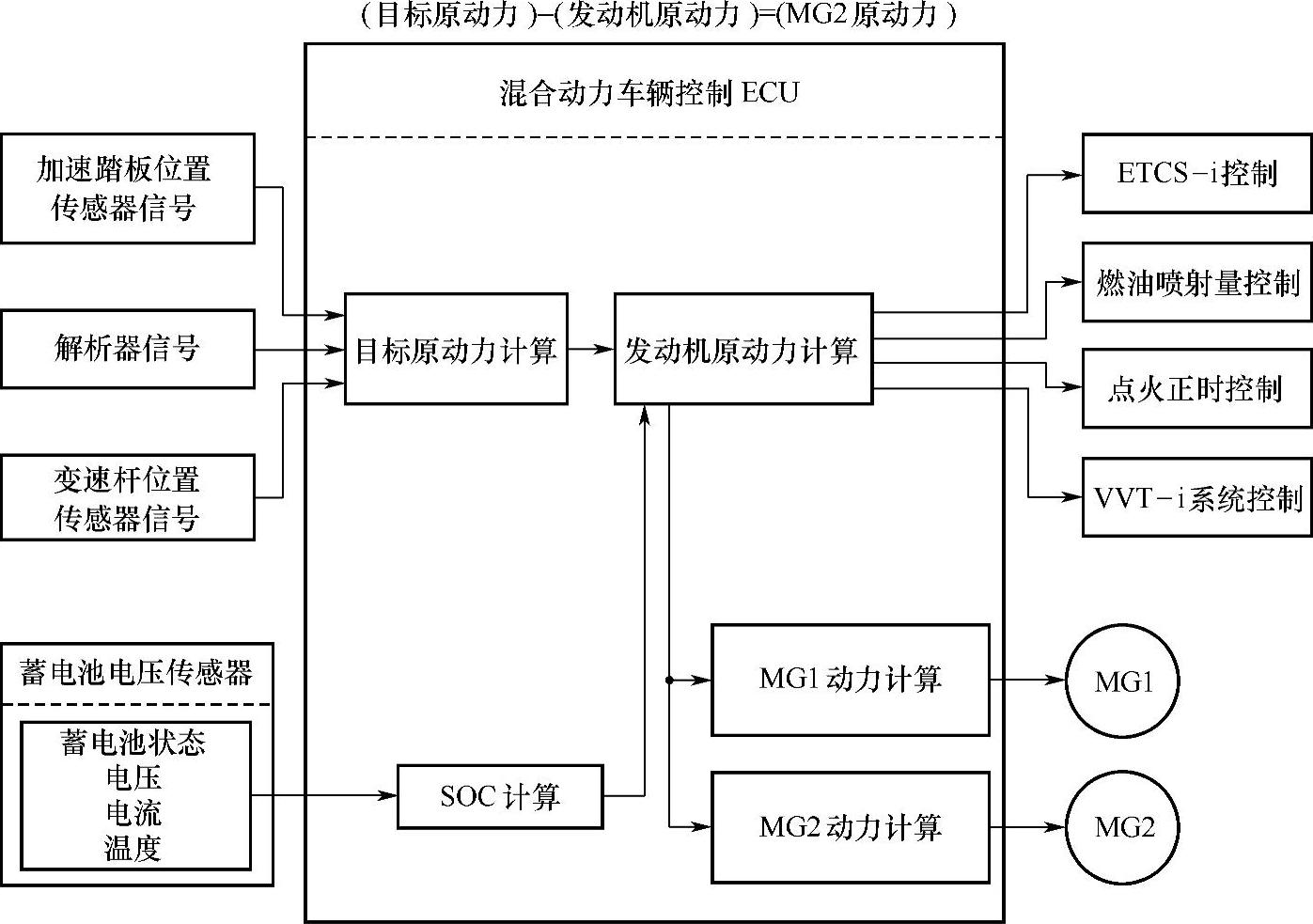
图2-54 原动力计算流程
⑥HV蓄电池的冷却风扇控制。混合动力车辆控制ECU通过HV蓄电池总成内的4个温度传感器来监视蓄电池温度是否升高,然后使用占空比控制对冷却风扇进行无级驱动,从而使HV蓄电池总成的温度保持在规定范围内。HV蓄电池冷却风扇控制原理框图如图2-60所示。
空调系统运行以降低车厢温度时,如果HV蓄电池温度在正常范围内,则混合动力车辆控制ECU将关闭蓄电池冷却风扇或将风扇转切换为低速。该控制的目的是优先降低车厢温度,同时也通过位于后窗台板后装饰板中央的进气管冷却蓄电池模块。
⑦辅助蓄电池充电控制。混合动力车辆控制ECU根据来自辅助蓄电池的蓄电池温度传感器信号控制DC-DC转换器(混合动力车辆转换器),以控制辅助蓄电池的充电电压。辅助蓄电池充电控制系统图如图2-61所示。
蓄电池吸收充电电流的特性(蓄电池内部电阻)随蓄电池电解液温度的变化而变化。如果蓄电池电解液温度过低或过高,则蓄电池将衰退得更快,导致其过早失效。为避免这种情况,蓄电池温度传感器电阻按图2-62所示变化,使混合动力车辆控制ECU可以检测辅助蓄电池温度。
⑧MG1和MG2主控制。MG1由发动机驱动产生高压(交流),为MG2提供动力并对HV蓄电池充电,同时还可作为起动机来起动发动机。MG2由来自MG1或HV蓄电池的电力驱动,产生前轮动力。
制动期间,或未踩下加速踏板时,MG2发电以对HV蓄电池充电(再生制动控制)。
电机ECU(MG ECU)按照混合动力车辆控制ECU的指令,通过智能电源模块(IPM)控制MG1和MG2以驱动车辆。6个绝缘栅双极晶体管(IGBT)在ON和OFF之间切换,并根据驱动操作或发电操作控制各电机。
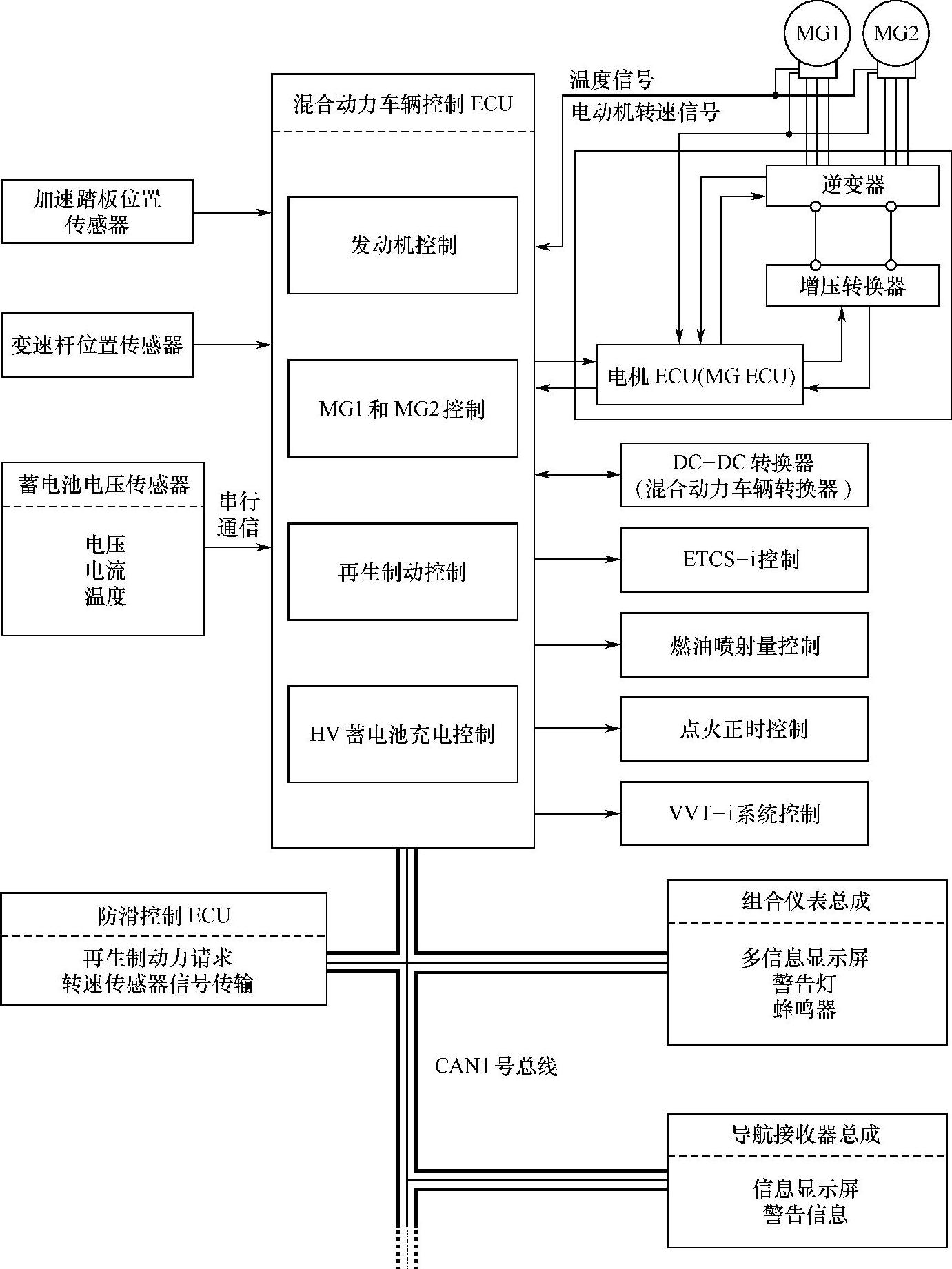
图2-55 混合动力车辆控制ECU控制系统框图
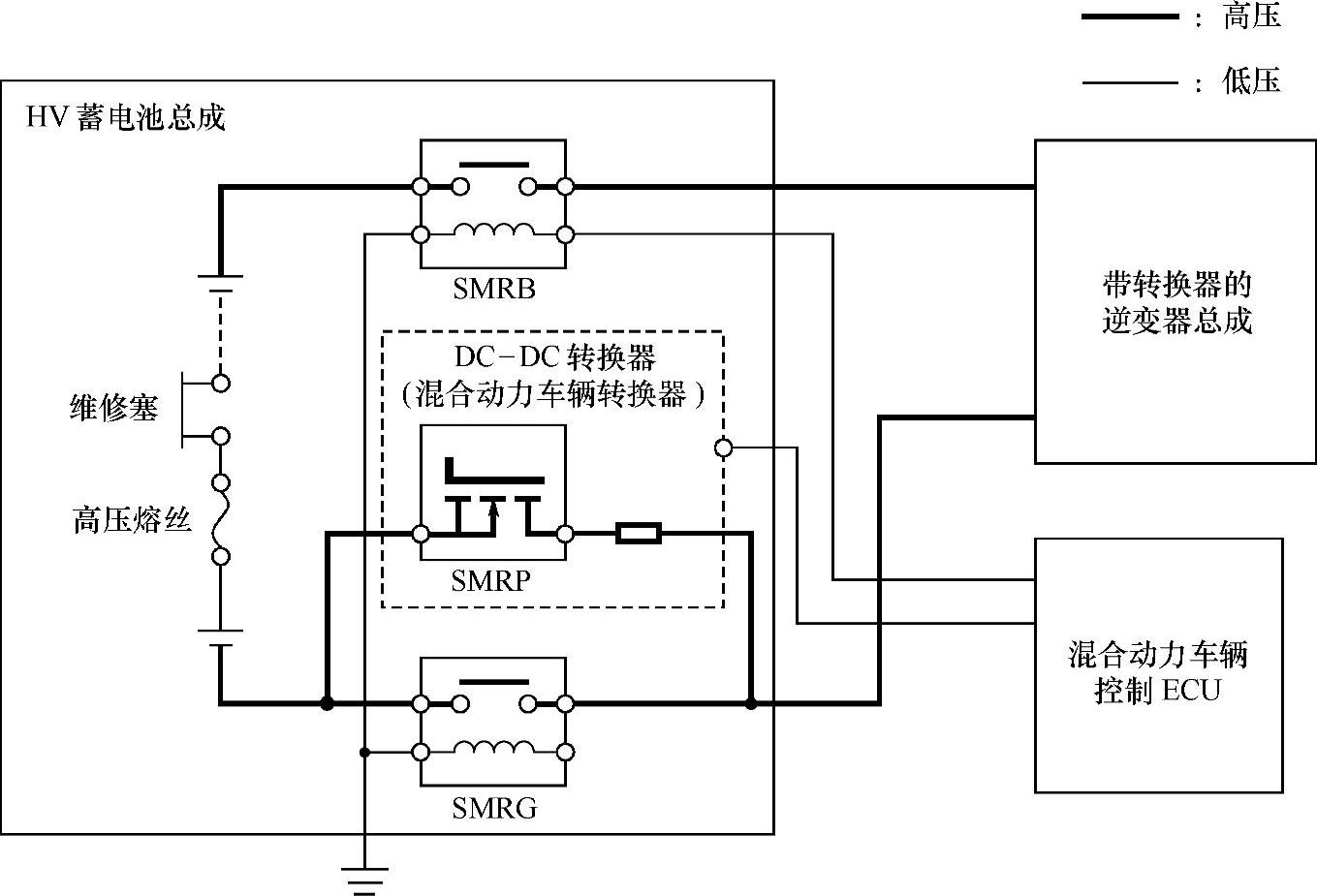
图2-56 系统主继电器(SMR)控制系统原理框图
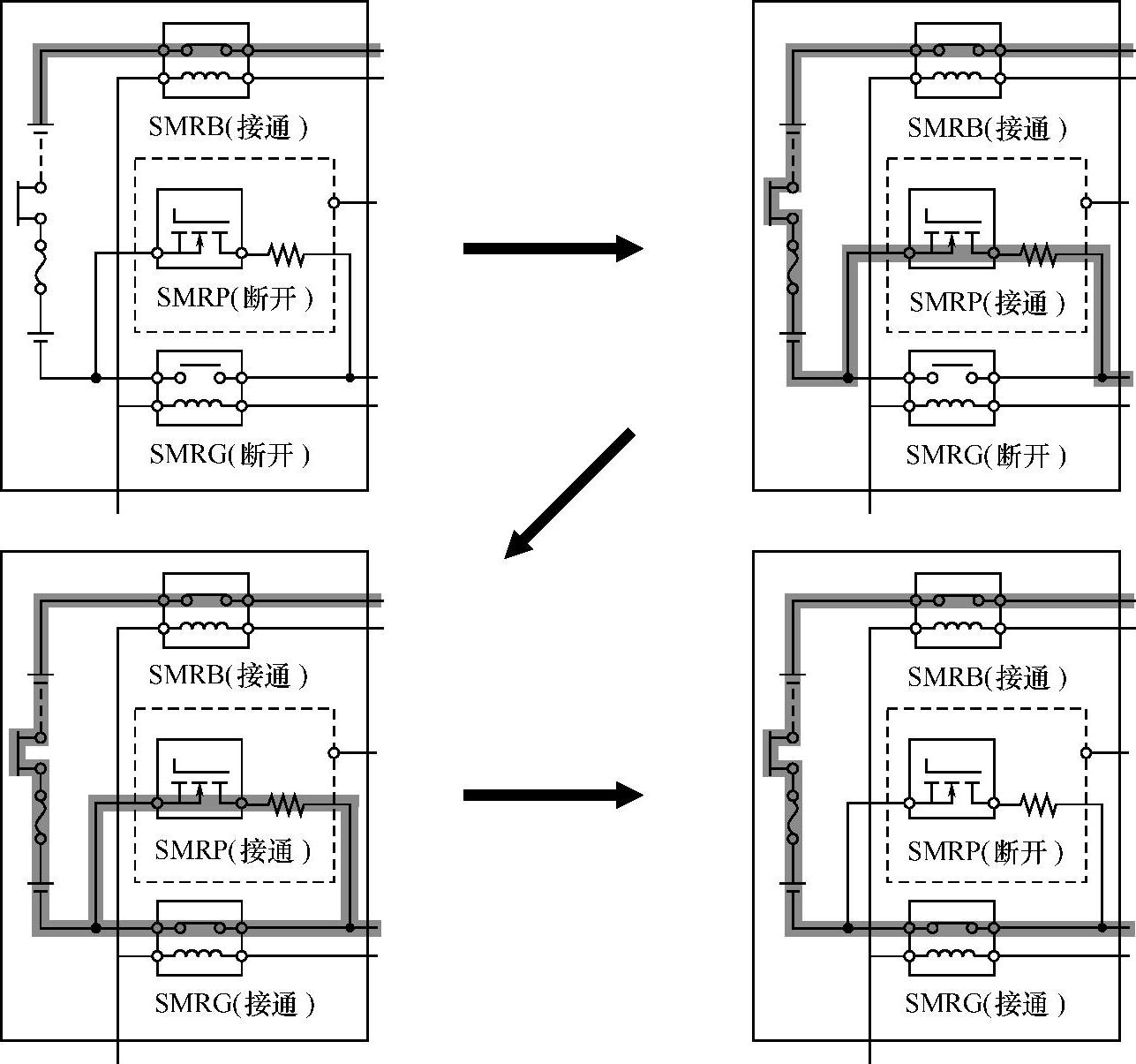
图2-57 继电器(SMR)电源接通原理
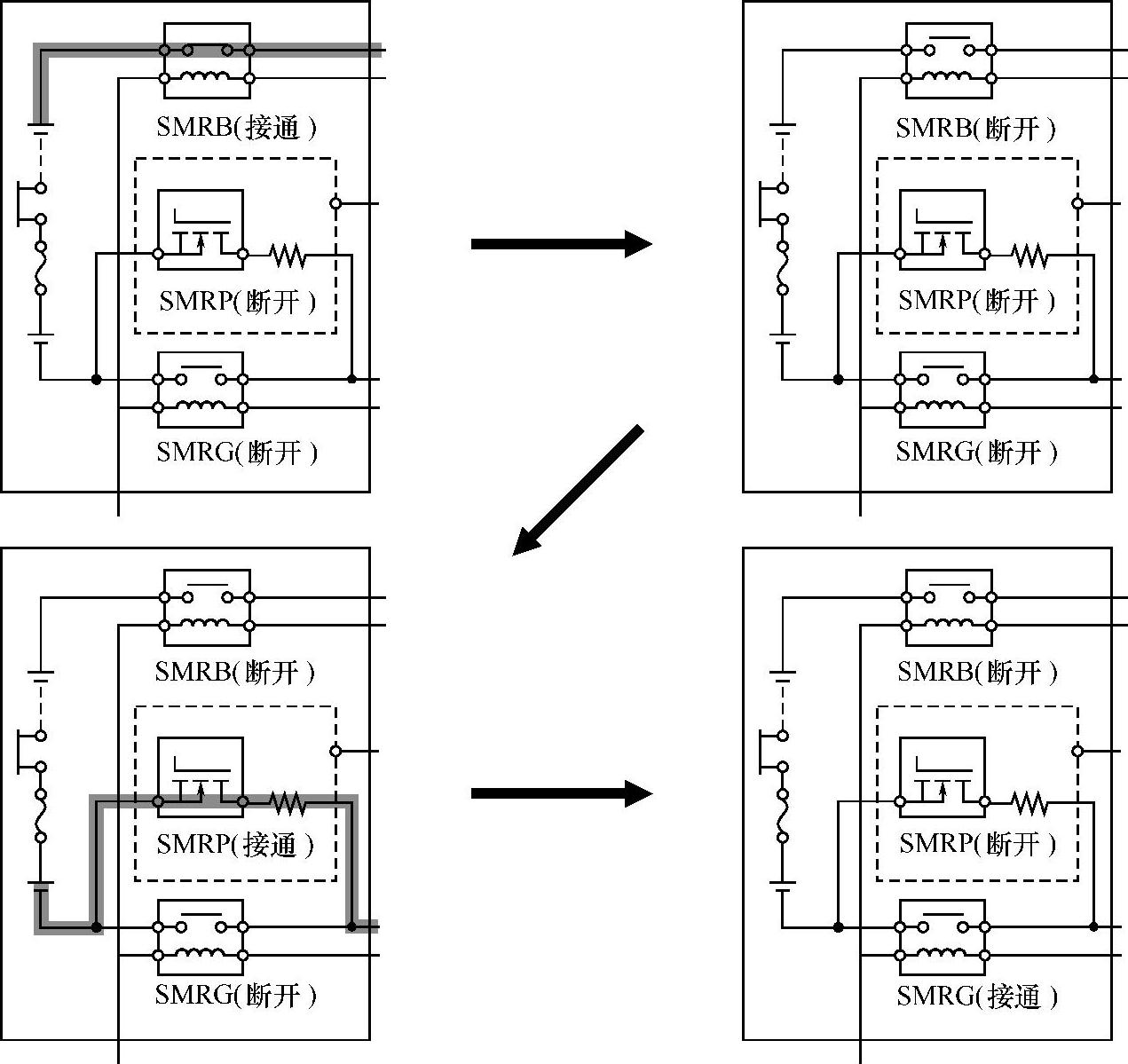
图2-58 继电器(SMR)电源切断原理
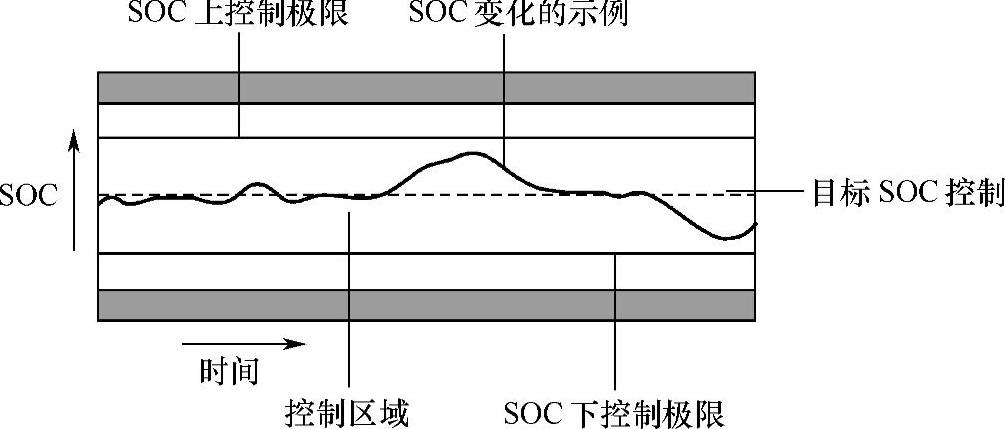
图2-59 充电状态控制
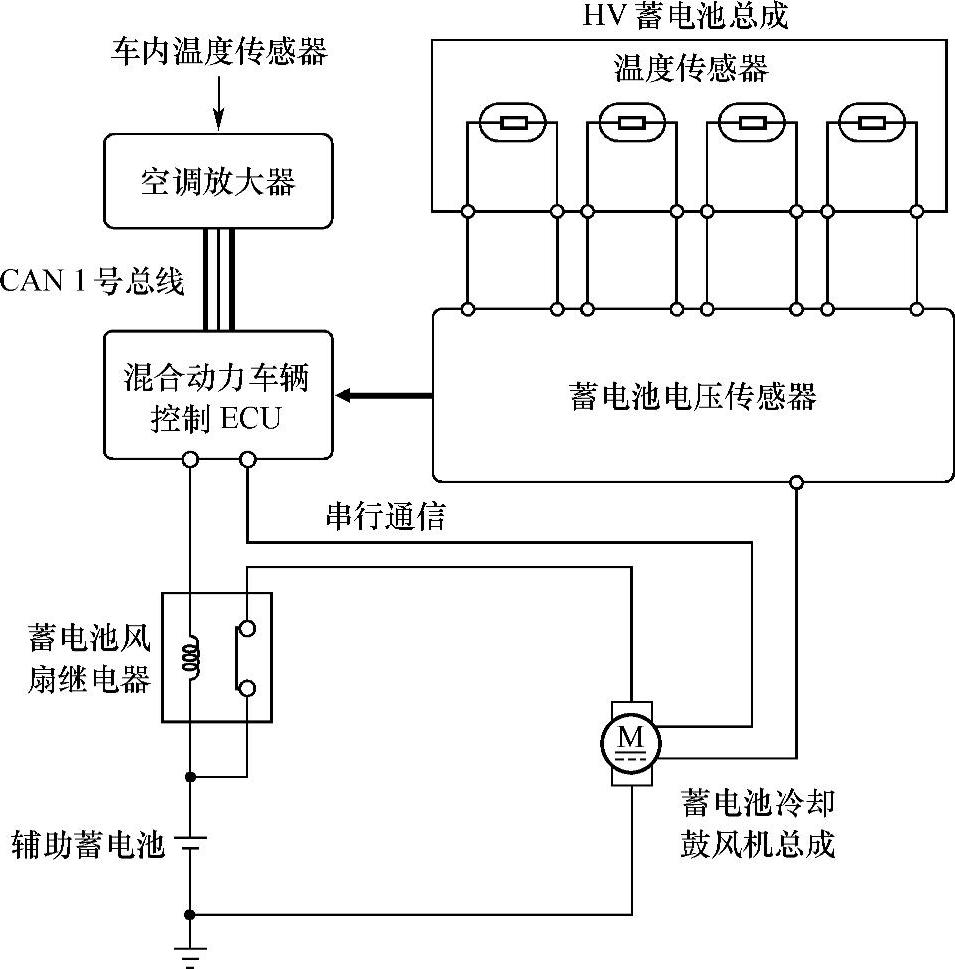
图2-60 HV蓄电池冷却风扇控制原理框图
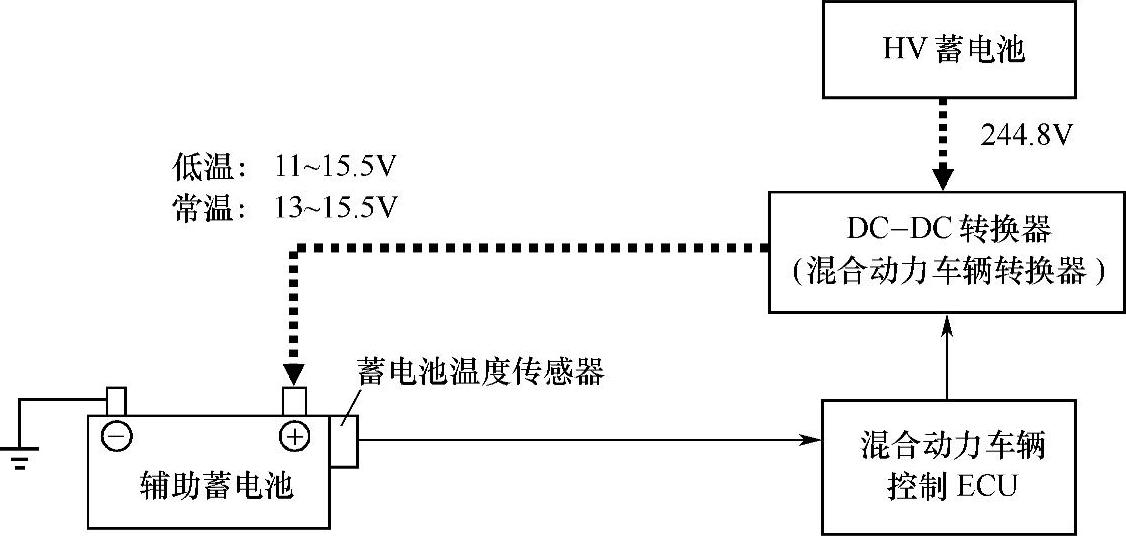
图2-61 辅助蓄电池充电控制系统图
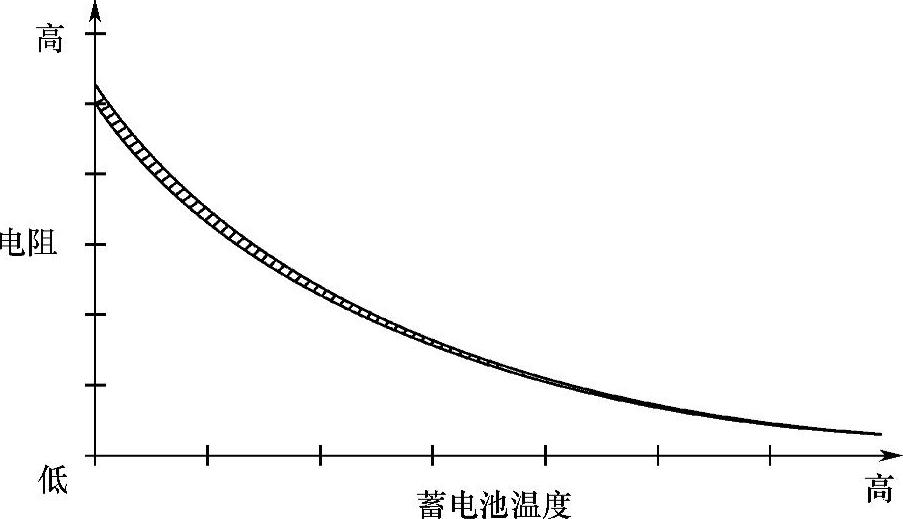
图2-62 蓄电池温度传感器电阻的变化
⑨带转换器的逆变器总成控制。逆变器根据混合动力车辆控制ECU通过电机ECU(MG ECU)提供的信号,将来自HV蓄电池的直流电转换为交流电提供给MG1和MG2,反之亦然。此外,逆变器将来自MG1的交流电提供给MG2。但是,MG1产生的电流在逆变器内转换为直流电后,再提供给MG2。
混合动力车辆控制ECU根据MG1和MG2发送的转子位置信息以及蓄电池电压传感器发送的HV蓄电池的SOC,通过MG ECU将信号传输至逆变器内的IGBT,以使MG1和MG2定子线圈在U、V和W相之间切换。
变速杆置于N位或混合动力车辆控制ECU接收到来自逆变器的过热、过电流或电压异常信号时,混合动力车辆控制ECU将切断控制信号传输至逆变器,以断开MG1和MG2的电气连接。
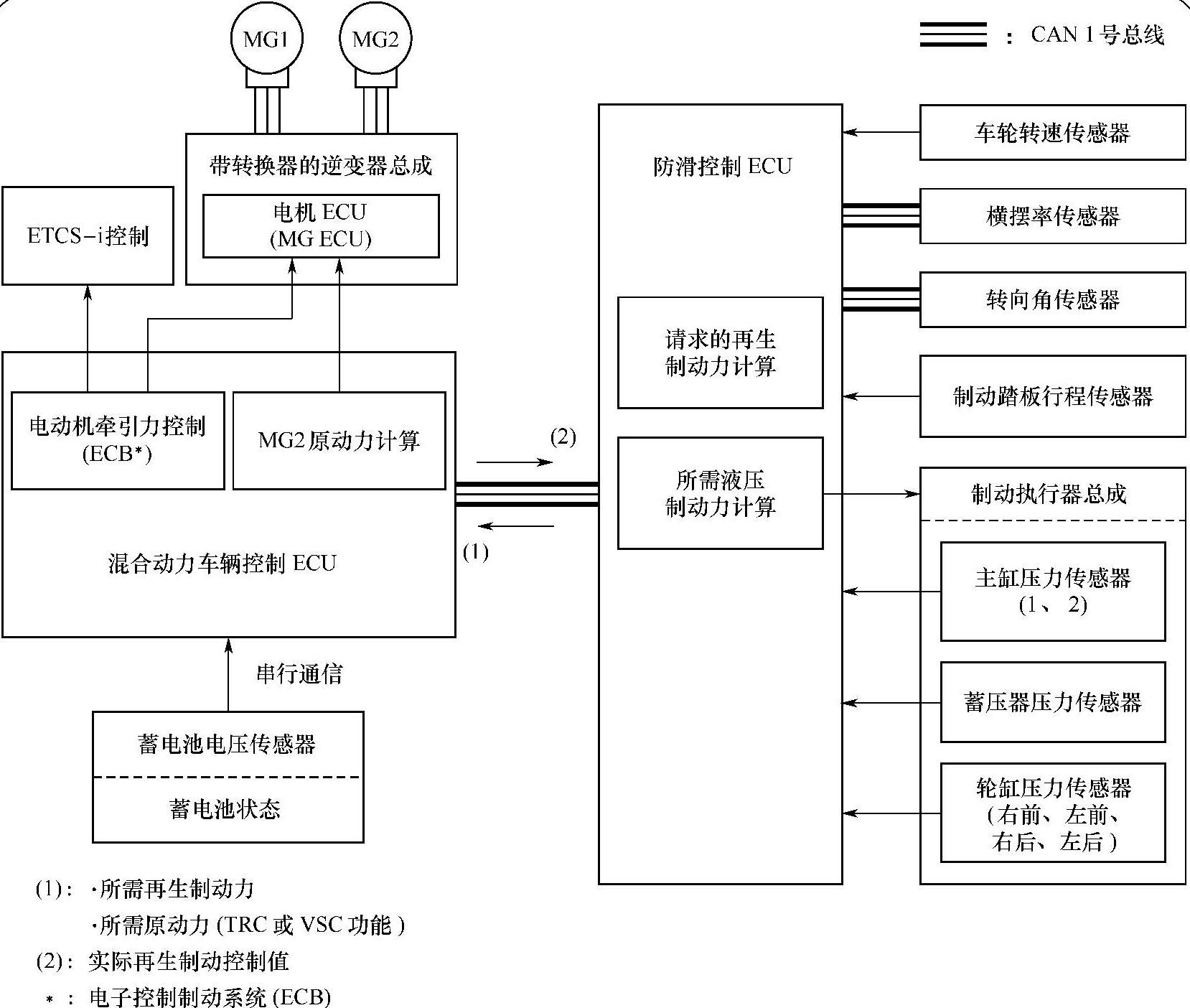
图2-63 防滑控制ECU控制系统原理图
⑩防滑控制ECU控制。防滑控制ECU控制系统原理图如图2-63所示。防滑控制ECU根据制动执行器内的主缸压力和驾驶人踩下制动踏板时产生的制动踏板行程传感器信号计算所需的总制动力。防滑控制ECU从总制动力中算出部分所需的再生制动力,并将结果发送至混合动力车辆控制ECU。
混合动力车辆控制ECU用MG2执行负转矩,并执行再生制动功能。防滑控制ECU控制制动执行器电磁阀并产生轮缸压力,该压力是总制动力减去实际再生制动控制值后的剩余量。
防滑控制ECU将请求输出至混合动力车辆控制ECU,使车辆在TRC或VSC功能控制下行驶时执行电机牵引力控制。混合动力车辆控制ECU根据当前驾驶条件控制发动机、MG1和MG2,以控制原动力。
⑪蓄电池控制。蓄电池电压传感器检测用来判定充电或放电值的HV蓄电池状态信号(电压、电流和温度),并将其传输至混合动力车辆控制ECU。蓄电池电压传感器也检测执行冷却风扇控制操作所需的冷却风扇电压信号,并将其传输至混合动力车辆控制ECU。蓄电池电压传感器配备泄漏检测电路,以检测HV蓄电池是否有过大电流泄漏。蓄电池控制工作系统图如图2-64所示。
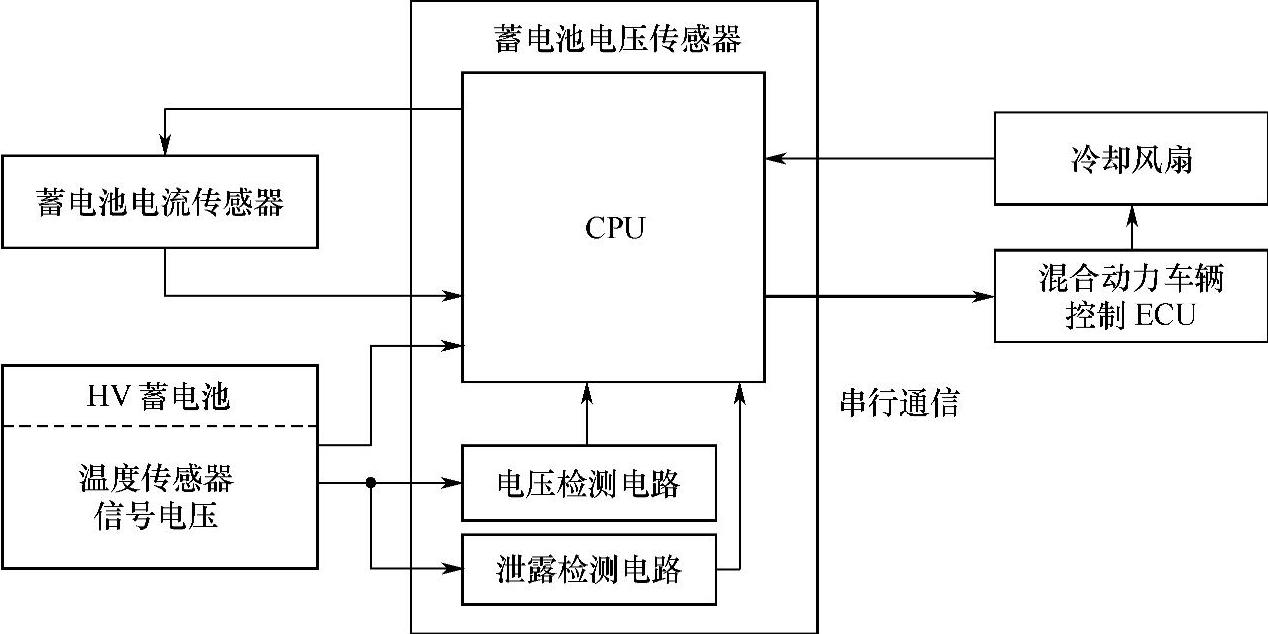
图2-64 蓄电池控制工作系统图
⑫碰撞时的控制。如果车辆遇到以下描述的任一情况,则混合动力车辆控制ECU将通过断开系统主继电器(SMR)来切断整个电源以确保安全。当发生正面碰撞或侧面碰撞时,混合动力车辆控制ECU会接收到来自气囊传感器总成的气囊展开信号;当发生正面碰撞时,混合动力车辆控制ECU会接收到来自安装在带转换器的逆变器总成上断路器传感器的执行信号。碰撞时的控制工作系统图如图2-65所示。
⑬指示灯和警告灯照明控制
●能量监视器
多信息显示屏配备能量监视器。能量监视器具有显示能量流的功能,使驾驶人可以监视车辆的行驶状况。能量监视器以箭头形式显示能量流,也可以8个等级显示HV蓄电池的充电状态(SOC),如图2-66所示。
●指示灯和警告灯
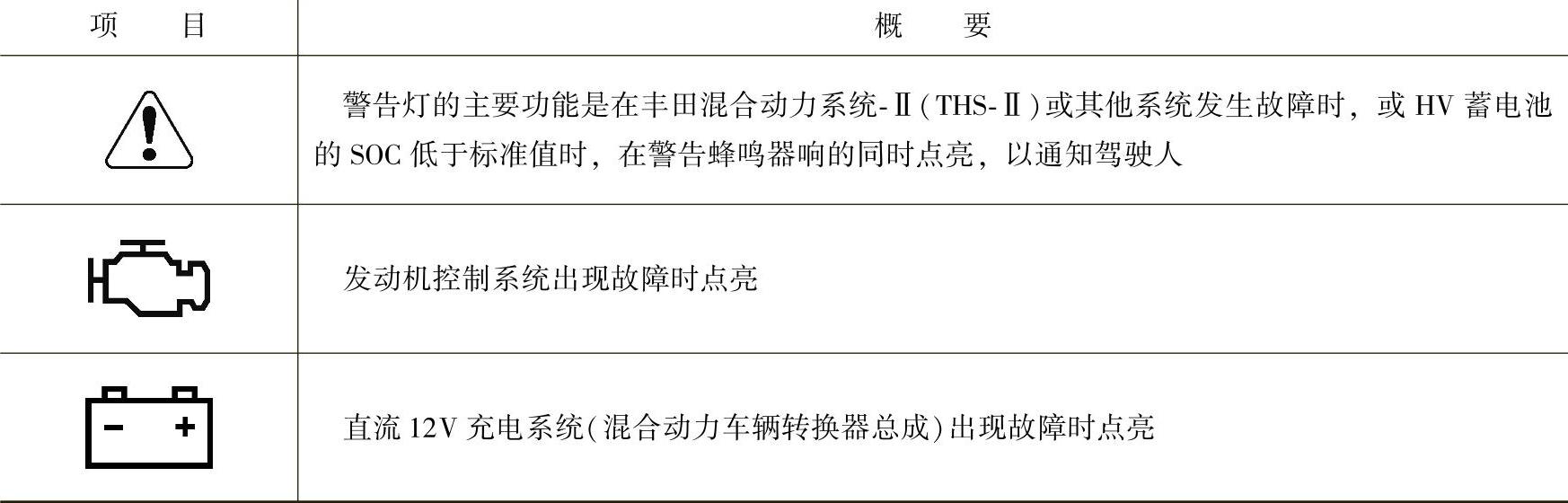
组合仪表总成内的指示灯和警告灯及描述如图2-67和表2-5所示。
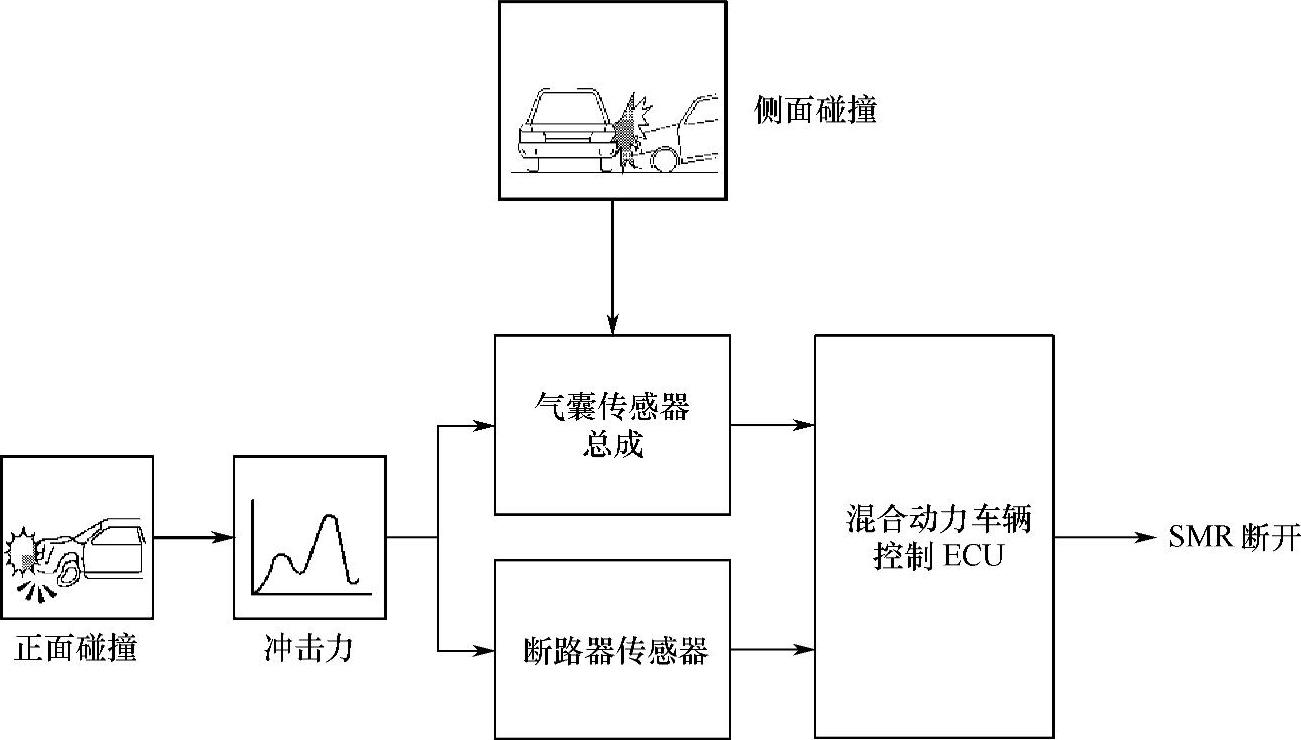
图2-65 碰撞时的控制工作系统图
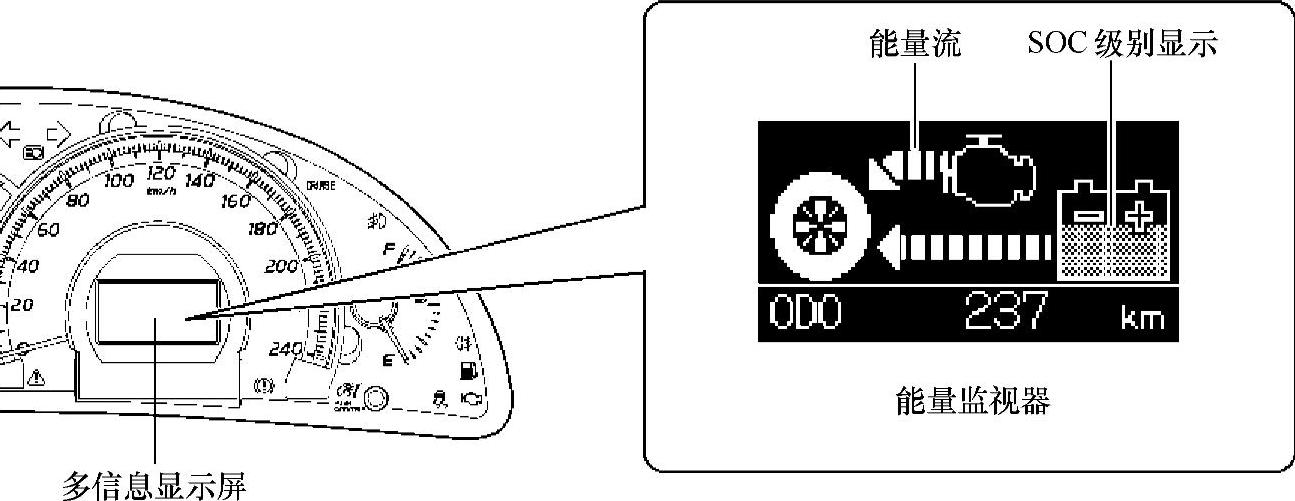
图2-66 能量监视器
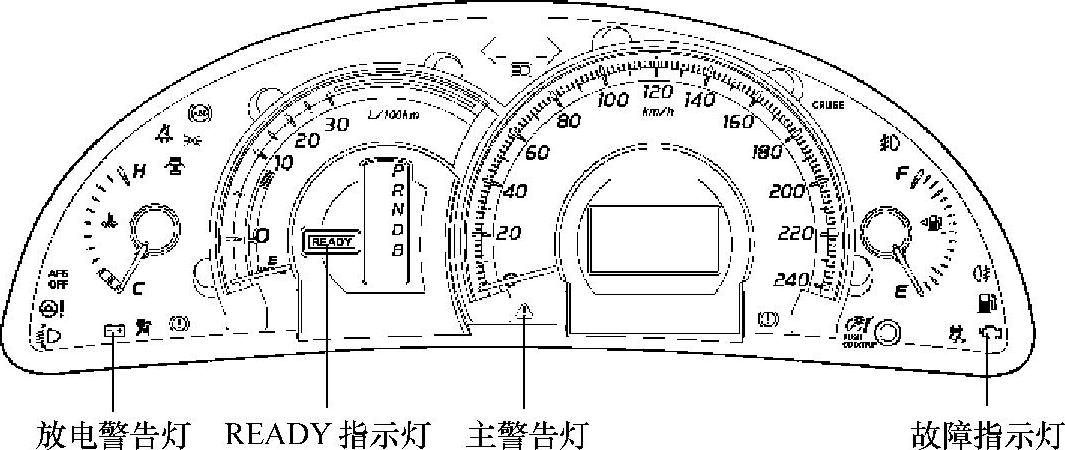
图2-67 组合仪表总成内的指示灯和警告灯
表2-5 组合仪表总成内的指示灯和警告灯及描述

(续)
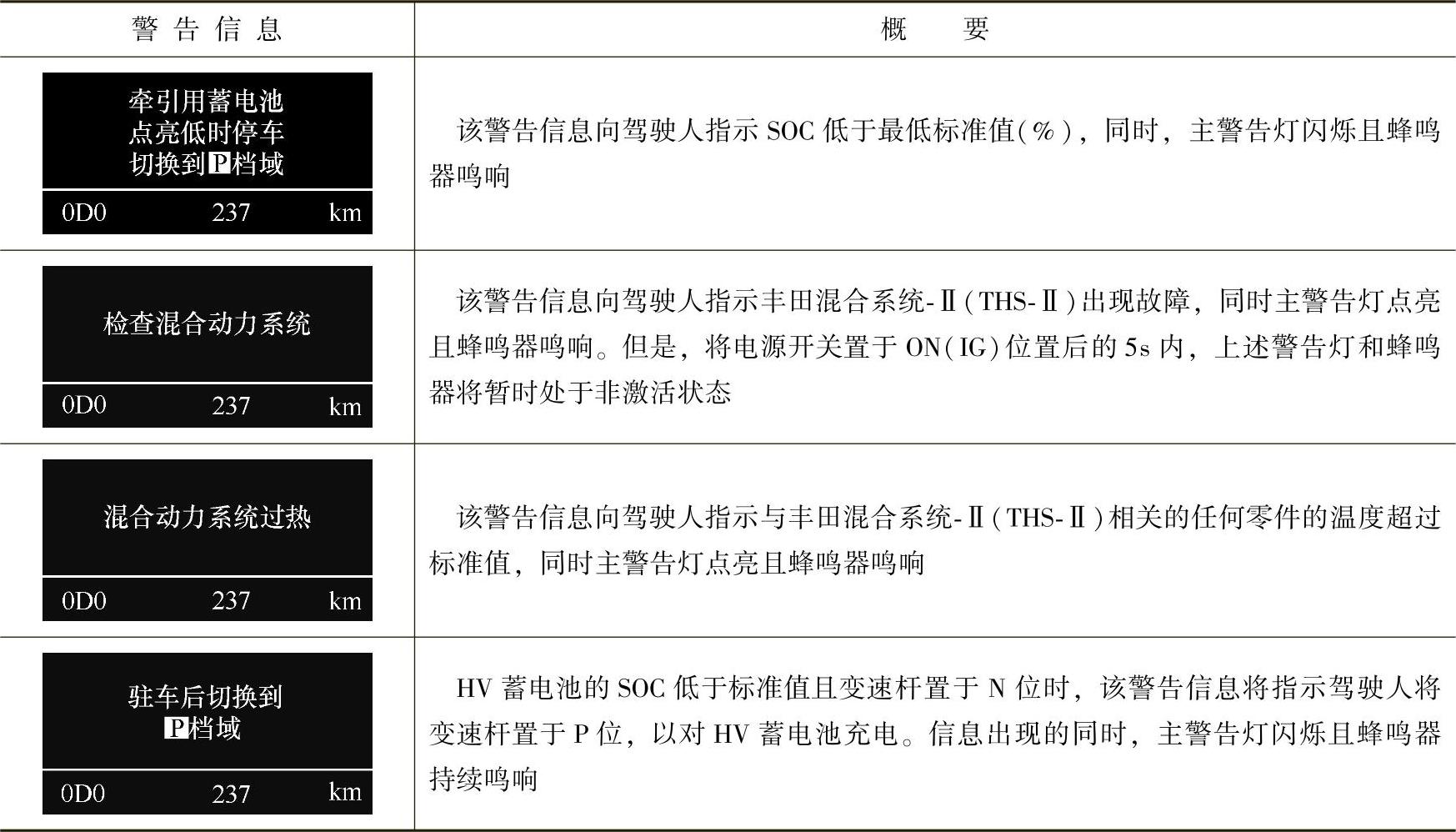
多信息显示屏用来显示以下4种丰田混合动力系统-Ⅱ(THS-Ⅱ)警告信息,见表2-6。
表2-6 多信息显示屏警告信息
⑭失效保护。如果混合动力车辆控制ECU检测到丰田混合动力系统-Ⅱ(THS-Ⅱ)存在故障,则将根据存储在存储器中的数据控制系统。
⑮诊断。如果混合动力车辆控制ECU检测到丰田混合动力系统-Ⅱ(THS-Ⅱ)存在故障,则ECU将执行诊断并存储与故障相关的信息。此外,ECU将点亮或闪烁故障指示灯(MIL)以及与ECU相关的主警告灯,以告知驾驶人出现故障。
混合动力车辆控制ECU将存储相应故障的诊断故障码(DTC)。
常规故障码提供3位信息代码(INF代码),作为5位主要代码的子集。这样可进一步缩小故障范围以确认故障。
可通过查看与混合动力系统故障码相关的定格数据读取INF代码。
使用智能检测仪可以读取故障码。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。