



通过能量公式只能得出在力作用位置上沿着作用力方向上的位移。能量表达式更重要的意义在于[CZE 67],通过概括可以在任意位置上确定位移。下面通过在两个支座上的横梁为例(图15-2)来进一步说明做功原理。
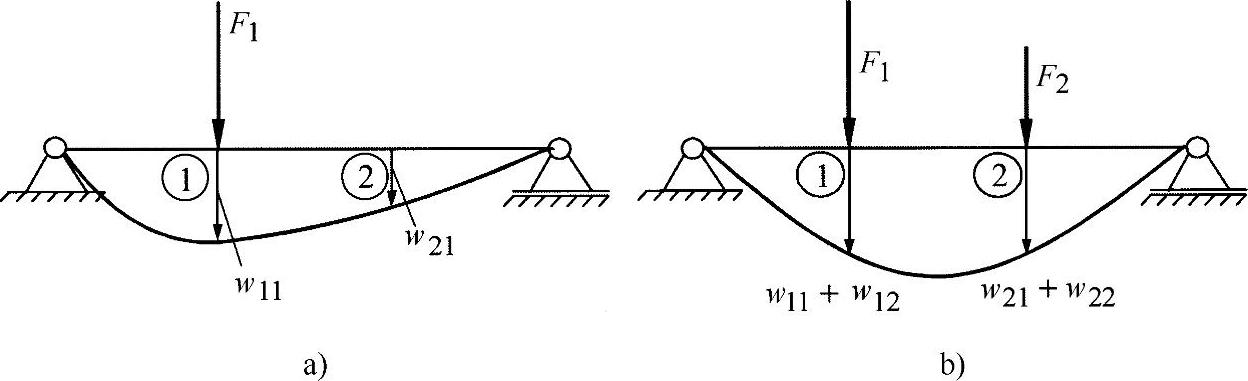
图15-2 梁的挠曲
a)单一力F1作用 b)载荷F1与F2作用
首先,横梁只受力F1载荷。在力作用点①发生了位移w11。在任意位置②可确定位移w21。如果假定在力与位移之间存在一个线性关系,则有:
w11=F1·δ11
与 (15.6)
w21=F1·δ21
这里用δik(i=位置,k=成因)引入位移值或者挠性值。
由力与位移可得出按比例分配的功:

如在已经承受载荷的桁梁的位置②处施加另外一个力F2,则会出现附加的做功分量,即有:
●带有自身位移的力F2的功:

●附加的功:
πa(3)=F1·w12=F1·F2·δ12 (15.9)
通过力F1产生的位移w12,是由力F2在位置①引起的。这里没有预因子1/2,因为在位移w12开始时F1就已经达到最大值了。
由此,梁的总功为

按照“Betti定理”,功的大小与力的顺序无关。
如进一步用力矩线将导致力矩变化的力分开,则有:
与 (15.11)
与方程式(15.6)等效,力矩Mi描述了针对力Fi=1的力矩线。
为了重新确定变形,可由能量平衡公式πa=πi出发。对以上表达式进行相应地计算,可得出:(https://www.xing528.com)
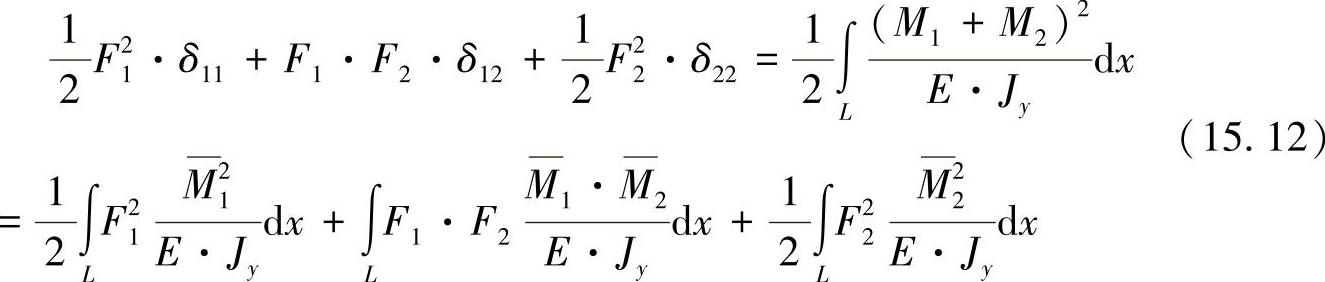
由于计算一般是以小位移作为前提条件,载荷导入的顺序并不重要。因此,也可以对力矩运用叠加原理。如果对方程式(15.12)中的右边与左边进行对比,可以看出广义的关系为

根据wik=Fk·δik与方程式(15.11)可得出:
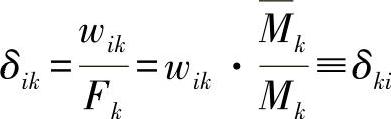 (Mawxell定理/可逆定理)
(Mawxell定理/可逆定理)
以及

由做功原理导出的规则如下:
如果一个桁梁在位置k受载,而要研究位置i处的位移,则可以在位置i处,在所研究的位移方向上引入一个虚拟力值“1”:根据虚拟力值来确定实际的力矩作用过程Mk和力矩变化 ,由乘积的积分可得出要计算的位移wik。
,由乘积的积分可得出要计算的位移wik。
在应用这一关系时必须要注意,功是由力的值乘以位移得出的。因此,存在如下关系:
力×位移
弯曲力矩×角
扭转力矩×转角
在实际应用中已经证明了,方程式(15.14)的积分可用于求解最重要的载荷情形。图15-3列出了一些常用的数值,它们出现在两个力矩线的乘法以及最后的积分中。在方程中用数值因子c乘在前面,可得到要求的值wik:
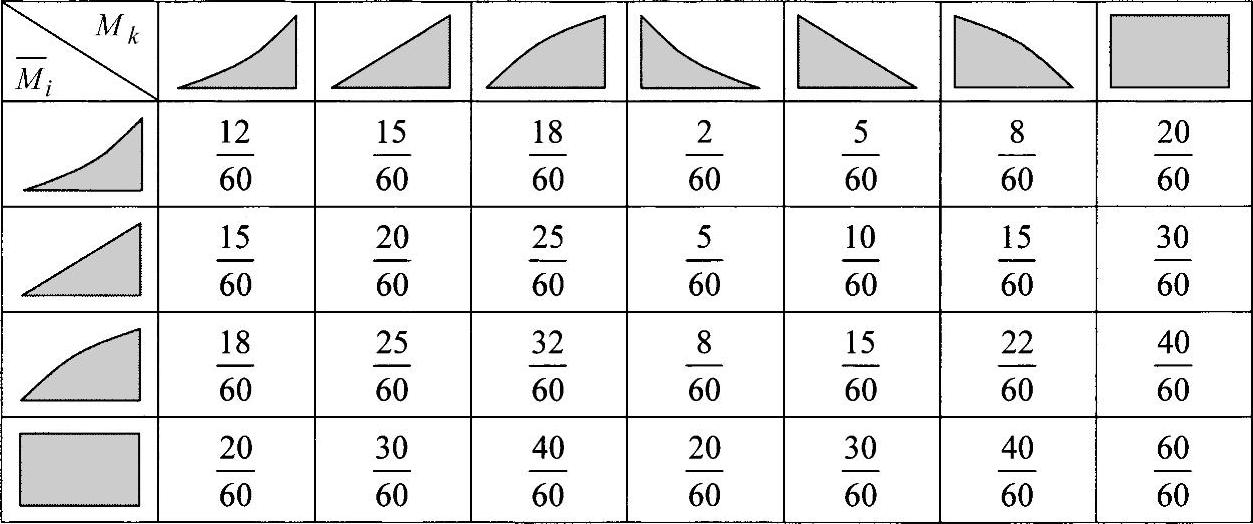
图15-3 数值因子c的表格

这里,Mi和Mk为力矩面积相应的边界值,L为桁梁的长度,E·J为假设的抗弯刚度。
图15-4简短示例了上表在悬臂桁梁上的应用。
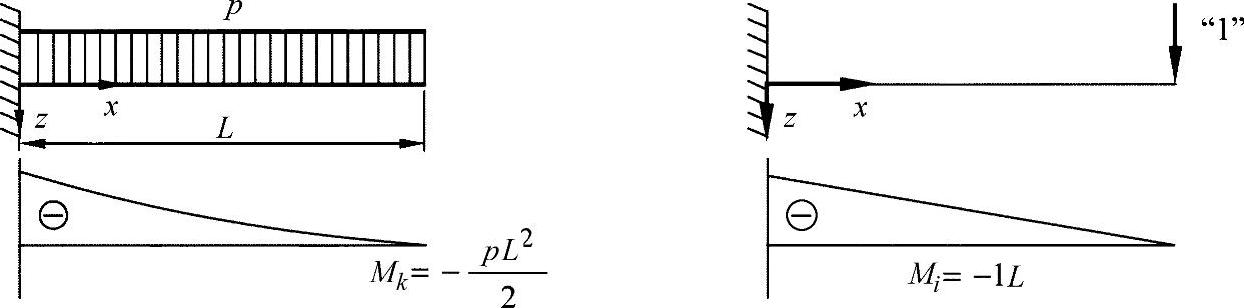
图15-4 分布载荷作用下的悬臂桁梁
根据方程式(15.15),可得出承受载荷的情形下最终的挠曲为

其中,预因子c=15/60可从表中找到。相应地,可确定每个中间位置w(x)。
以上说明了一个简单方法,即如何确定任意结构的挠曲。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。