



1.有刷电动机的接线方法
如图4-17所示,有刷电动机一般有正、负两根引线:红线是电动机正极,黑线是电动机负极。如果将正、负极交换接线,只会使电动机反转,一般不会损坏电动机。如果电动机反转,也只需将正、负极线对换一下即可。
2.无刷电动机的接线方法
如图4-18所示,无刷电动机的线圈引线有3根(A、B、C相线)、霍尔引线有5根(分别是霍尔元件公共电源正极、公共电源负极、A相霍尔输出、B相霍尔输出和C相霍尔输出),这8根引线必须和控制器相应引线相对应,电动机才能正常转动。

图4-17 有刷电动机正负引线图
切记,不要将电动机的信号线和相线相连,否则会导致传感器损坏。
60°和120°相角的无刷电动机,需要由与之相对应的60°和120°相角的无刷电动机控制器来驱动,两种不同相角的控制器不能直接互换。60°相角的无刷电动机与60°相角控制器相连的8根线的接线有正转和反转两种。
无刷电动机与控制器的接口图分别如图4-19、图4-20所示。
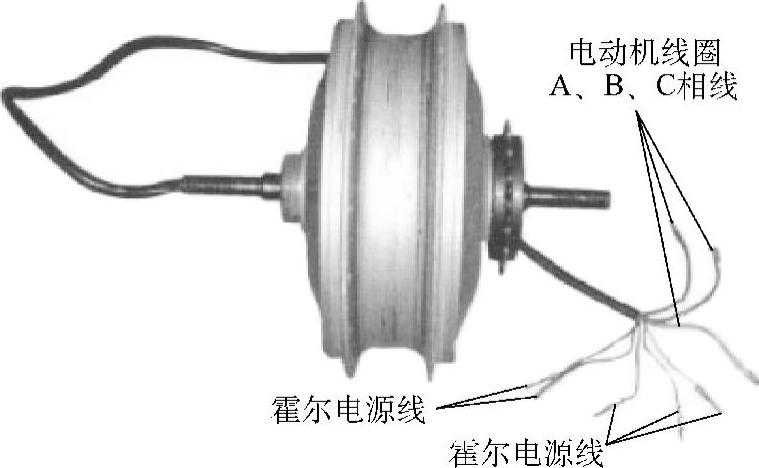
图4-18 无刷电动机接线图
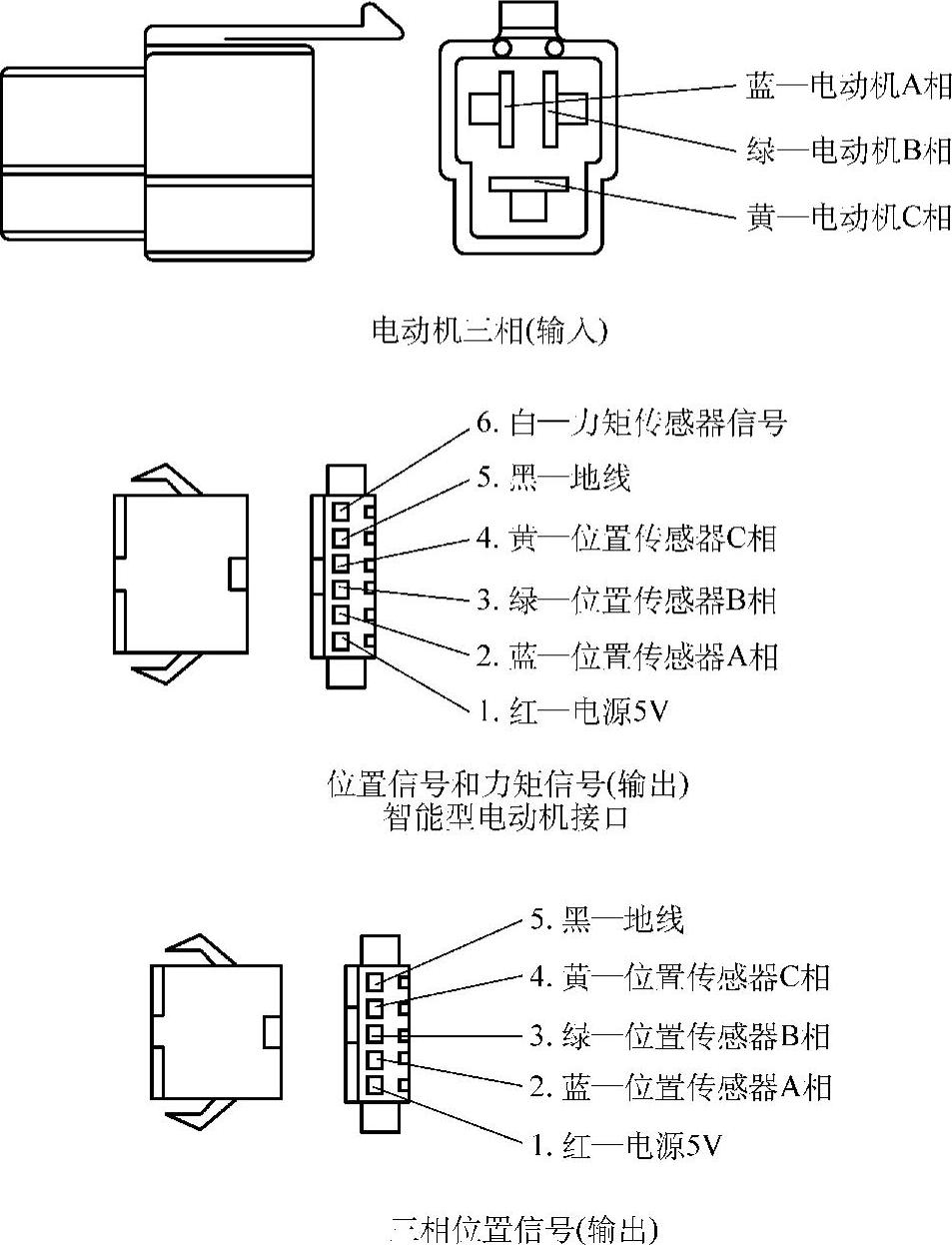
图4-19 无刷电动机接口图
对于120°相角的无刷电动机,通过调整线圈引线的相序和霍尔引线的相序,电动机与控制器相连的8根线的接线有正转和反转两种。
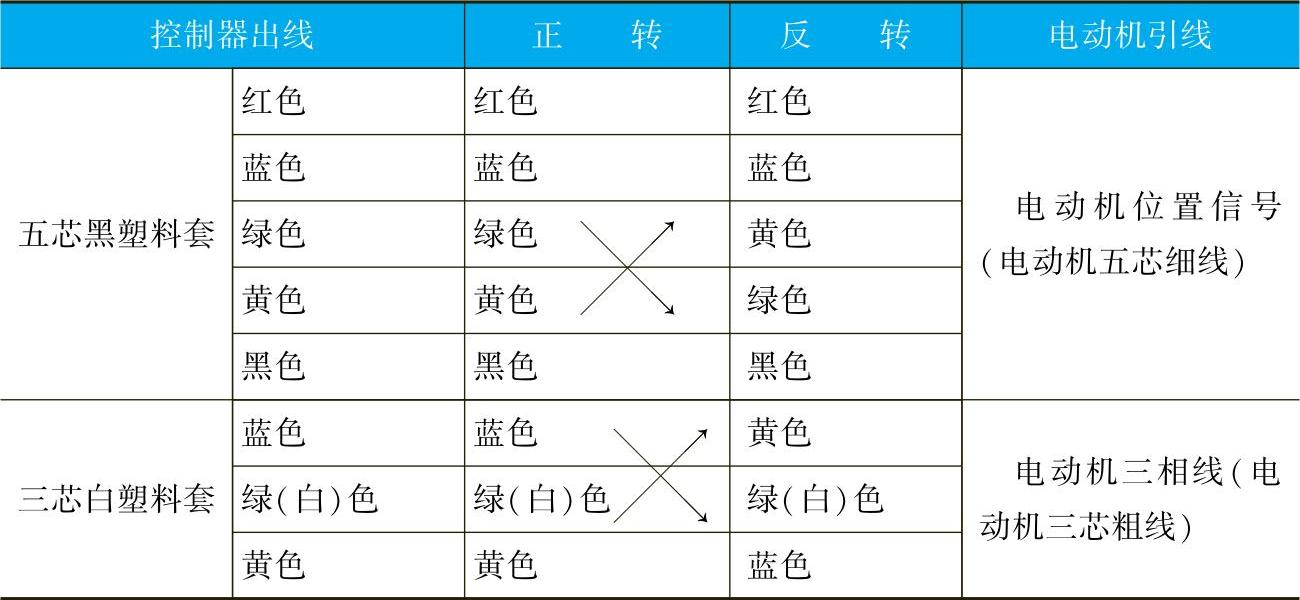
如果无刷电动机反转,表明无刷控制器与无刷电动机的相角是匹配的,只要调整电动机的转向,即将无刷电动机与无刷控制器的霍尔引线的绿色线与黄色线交换接线,同时将无刷电动机与无刷控制器的主相线蓝色线与黄色线交换接线就可以了,见表4-2。
因为无刷电动机的换相是由控制器来实现的,所以它的反转需要对调2组线,见表4-2箭头(注意,需要反转时,绝对不可通过反接电源来实现,这样会损坏控制器)。
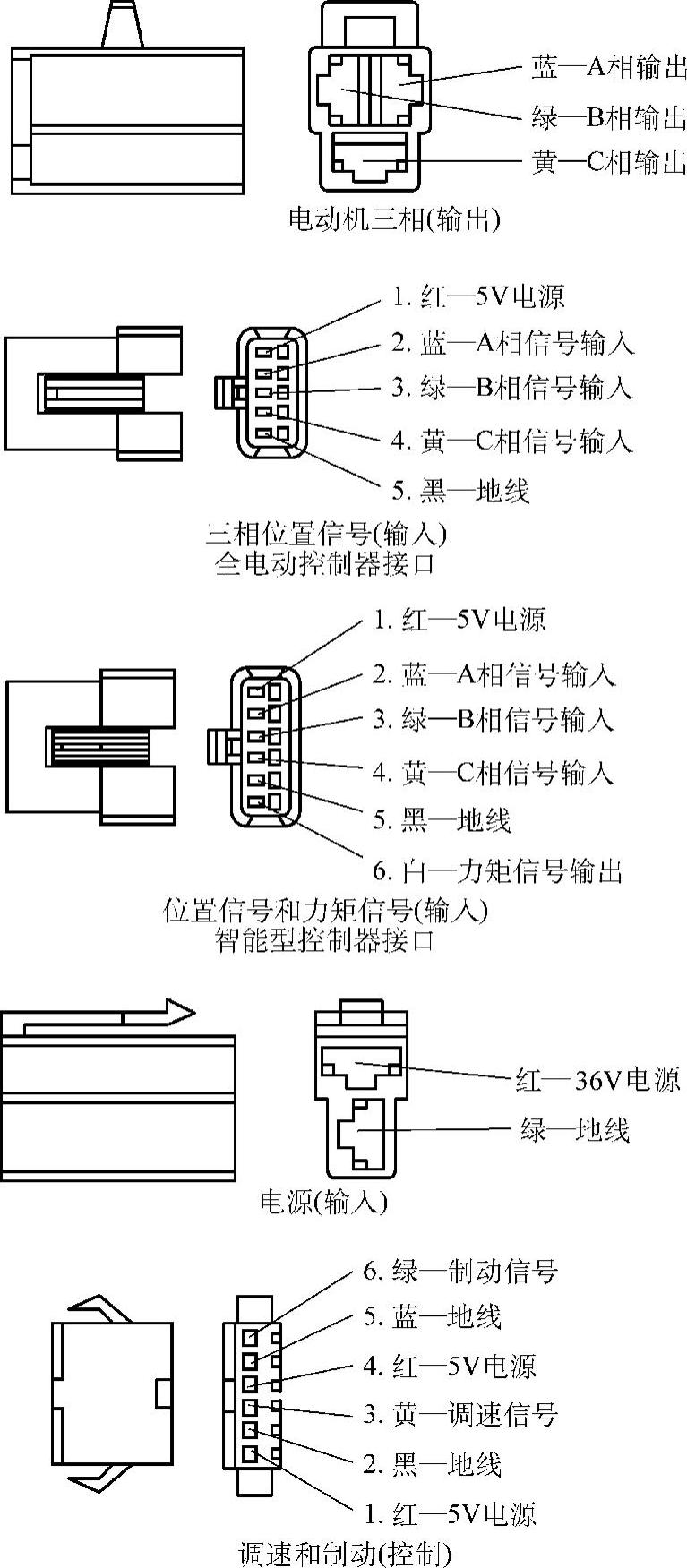
图4-20 无刷控制器接口图
表4-2 无刷电动机引线换向调整表
智能无刷电动机控制器具有自动识别电动机相角的功能,能同时实现60°与120°相角两种无刷电动机的驱动。(https://www.xing528.com)
部分厂家控制器与无刷电动机的接线见表4-3。
表4-3 部分厂家控制器与新、老无刷电动机的接线

3.无刷直流电动机相角的判断
无刷电动机的相角是指无刷电动机各线圈在一个通电周期里线圈内部电流方向改变的角度,常见的相位代数角有120°与60°两种。直流电动机相角的判断方法有如下两种。
1)根据霍尔元件安装空间位置判断。120°和60°两种相角电动机的霍尔元件安装位置不一样,一般60°相角电动机的三个霍尔元件摆放位置是平行的,120°相角电动机的三个霍尔元件中间的一个霍尔元件是呈翻转180°摆放的,如图4-21所示。
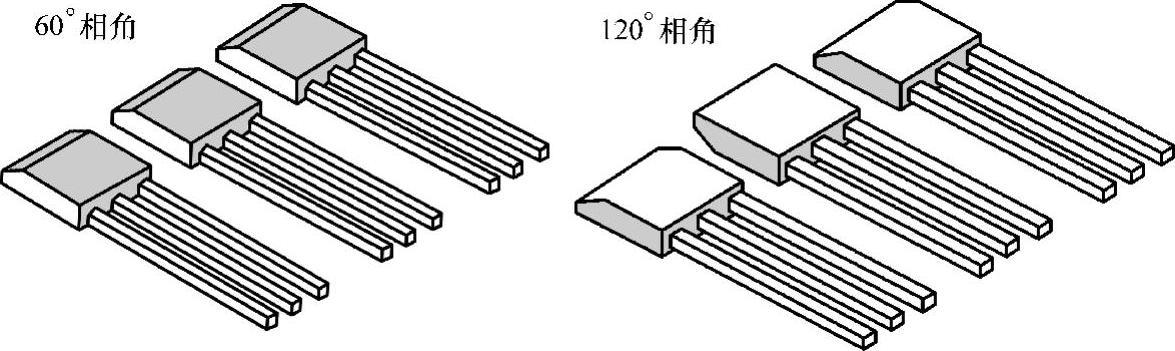
图4-21 无刷电动机霍尔元件安装图
2)根据无刷电动机相序的判断。电动机在静止状态时,转子磁钢所停顿的位置恰好为定子槽凸极的位置,磁钢一般不会停在定子槽心的位置。无刷电动机的磁钢数量一般为12、16、18片,对应的定子槽数为36、48、54槽,则最小磁拉力角分别为360°/36、360°/48、360°/54,如图4-22所示。
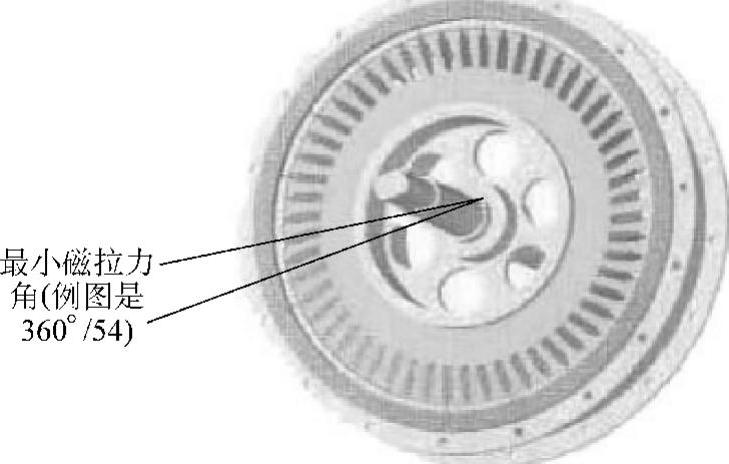
图4-22 无刷电动机相角测量图
利用无刷控制器(60°或120°)的5根霍尔引线,将无刷电动机霍尔元件引线的正负电源接好,将其余A、B、C三个相位传感器的引线任意接在控制器霍尔信号引线上。具体检测方法如下:
接通控制器电源,由控制器给霍尔元件供电,将万用表设置在+20V直流电压档,并将黑表笔接地线,红表笔分别检测三个引线的电压情况,记录下3根引线的高低电压。轻微转动电动机,让电动机转过一个最小磁拉力角度,再次检测并记录下3根引线的高低电压,如此检测记录6次(用1表示高电位,0表示低电位)。
检测出的霍尔真值信号序列是:
100、110、111、011、001、000为60°无刷电动机。
100、110、010、011、001、101为120°无刷电动机。
调整三个霍尔元件引线的顺序,让真值的信号严格按照上面的真值顺序变化,无刷电动机的A1B1C1三个相位就可以判断了。
从60°与120°无刷电动机霍尔真值信号序列中发现,第一个状态都是100,第二个状态都是110。假设100状态的1代表电动机的A相线,110状态中第二个1代表B相线,剩下的一个引线就是C相霍尔引线。
注意:这时的判定是无刷电动机的相序,而电动机的相位可能是ABC、BCA或CAB。在维修中,只需要知道无刷电动机的相序就够了。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。