



1.主要部件功能
左侧和右侧盲区监视传感器:将盲区监视传感器发出的毫米波输出到盲区传感器检测区域,使用反射的毫米波检测车辆、车距和相对速度,然后将此信息传输至内置信号处理电路;信号处理电路判定是否有车辆,并相应点亮或闪烁车外后视镜指示灯;使车外后视镜总成上的车外后视镜指示灯变暗。
盲区监视器主开关(警告取消开关总成):按下盲区监视器主开关将打开或关闭盲区监视系统。盲区监视系统打开时,盲区监视器ON/OFF指示灯将点亮。
左侧和右侧车外后视镜总成:车外后视镜指示灯点亮以告知驾驶人在盲区检测区域内检测到车辆。操作转向信号灯控制杆时,若在盲区检测区域内检测到车辆,则闪烁以告知驾驶人。
组合仪表总成(主警告灯、多信息显示屏):检测到盲区监视传感器故障或盲区监视传感器判定无法控制时主警告灯将点亮且多信息显示屏上显示信息以警告驾驶人。
组合仪表总成:将转向灯信号传输至左侧和右侧盲区监视传感器。
转向传感器:将转向角信号传输至左侧和右侧盲区监视传感器。
ECM:将倒档信号传输至左侧和右侧盲区监视传感器。
网络网关ECU:在CAN V总线和CAN分总线2之间传输数据。
制动执行器总成-防滑控制ECU:将车速信号传输至左侧和右侧盲区监视传感器。
主车身ECU(多路网络车身ECU):将目的地信号传输至左侧和右侧盲区监视传感器;将照明信号传输至左侧和右侧盲区监视传感器;将变光信号传输至左侧和右侧盲区监视传感器。
左侧和右侧车外后视镜控制ECU总成:将指示灯信号传输至车外后视镜总成。
2.工作条件
满足下列两个条件时,盲区监视系统工作:盲区监视器主开关(警告取消开关总成)打开;车速高于约16km/h。
盲区监视系统可以检测到检测区域中的车辆。左侧和右侧盲区监视传感器形成的检测区域如图1-48~图1-50所示。
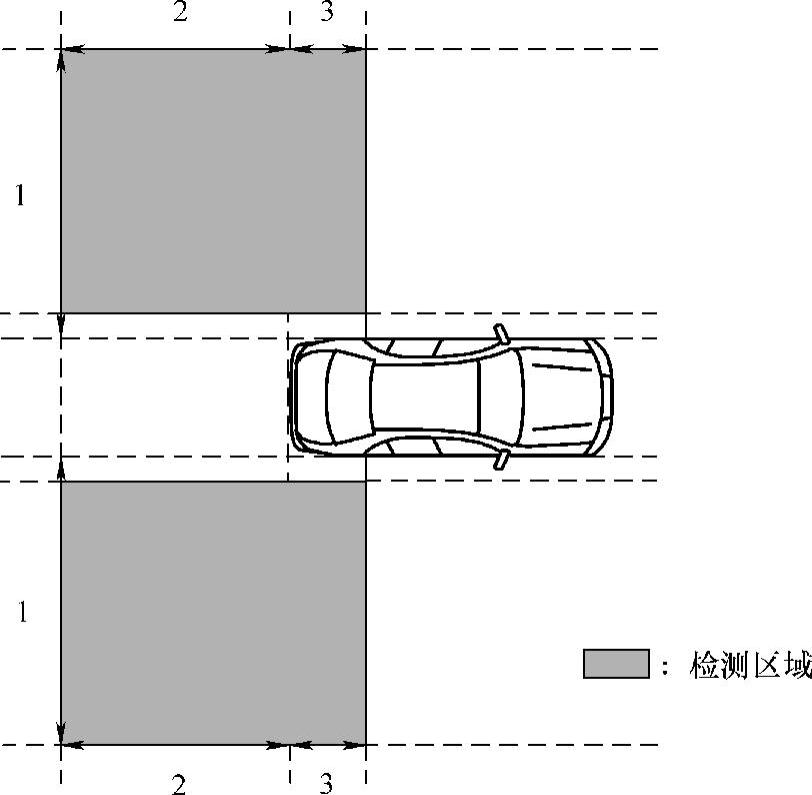
图1-48 检测区域
1—约3.5m(11.5ft) 2—3.0m(9.8ft) 3—1m(3.3ft)
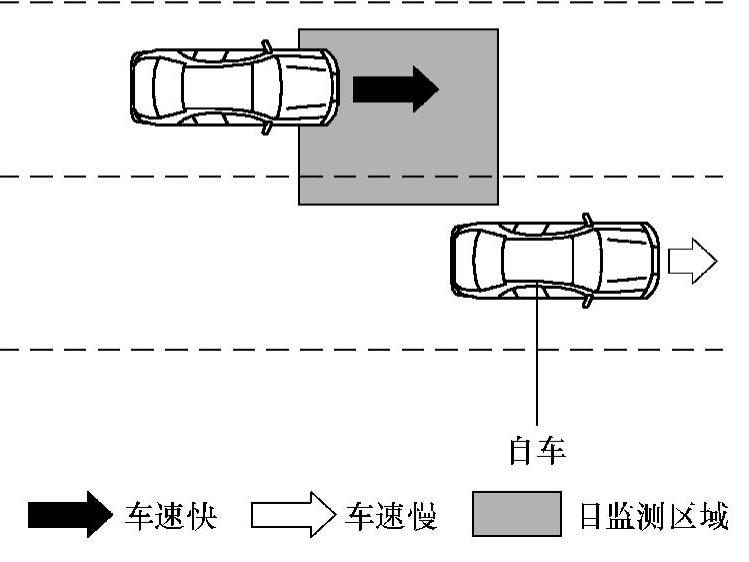
图1-49 自车被相邻车道的另一车辆超过时
3.工作原理与构造(https://www.xing528.com)
盲区监视传感器(图1-51):盲区监视传感器由毫米波雷达电路和信号处理电路组成。
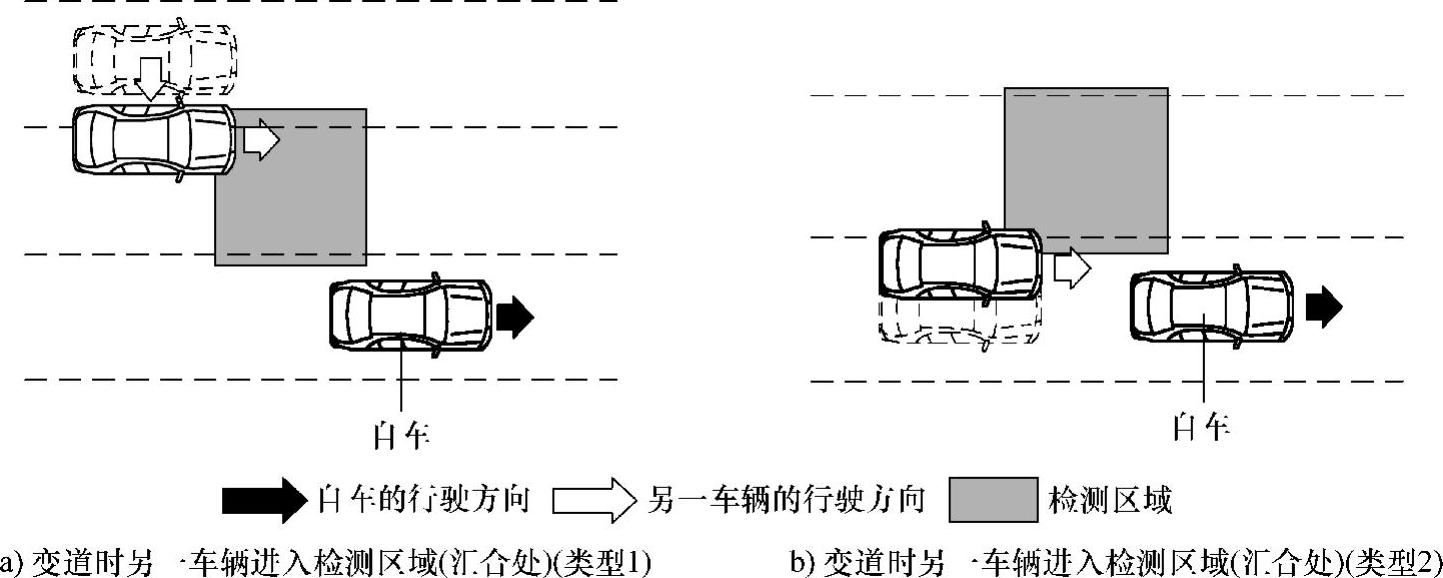
图1-50 由于变道,另一车辆进入自车的检测区域内时
毫米波雷达采用24GHz波段的频率。
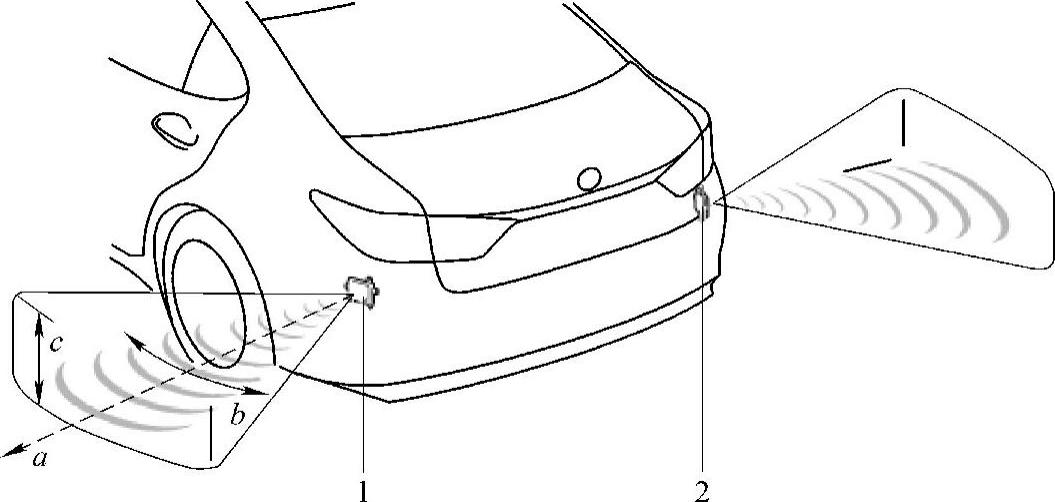
图1-51 盲区监视传感器工作示意图
1—左侧盲区监视传感器 2—右侧盲区监视传感器
a—距离:约50m(164ft) b—水平角度:约150° c—垂直角度:约20°
如下所述,根据反射毫米波雷达提供的信息计算与物体间的距离、方位角和相对速度。
距离:根据从毫米波雷达发射毫米波到毫米波雷达电路接收到反射的毫米波所经过的时间长度来计算。距离约为50m。
方位角:根据接收到的毫米雷达波反射的接收角计算。检测角的水平范围约为150°,垂直范围约为20°。
相对速度:通过使用反射的毫米雷达波的频率变化(多普勒效应)计算。
提示:多普勒效应使观察者接收到运动物体发射的无线电波,接近观察者时该无线电波频率变高,远离时频率变低。这种现象是由于物体位于远处时,接收无线电波的频率高于无线电源的频率所致。若需要确定雷达轴线,则使用SST。
根据工作情况,盲区监视系统使用车外后视镜指示灯告知驾驶人另一车辆进入自车的盲区监视传感器检测区域,从而便于确认安全性。
未操作转向灯开关时,车外后视镜指示灯将会点亮以告知驾驶人另一车辆进入盲区检测区域,存在车辆并且操作转向灯开关时将会闪烁以告知驾驶人。
盲区监视系统配备了诊断功能,可在多信息显示屏上显示警告信息。
盲区监视系统工作原理控制图如图1-52所示。
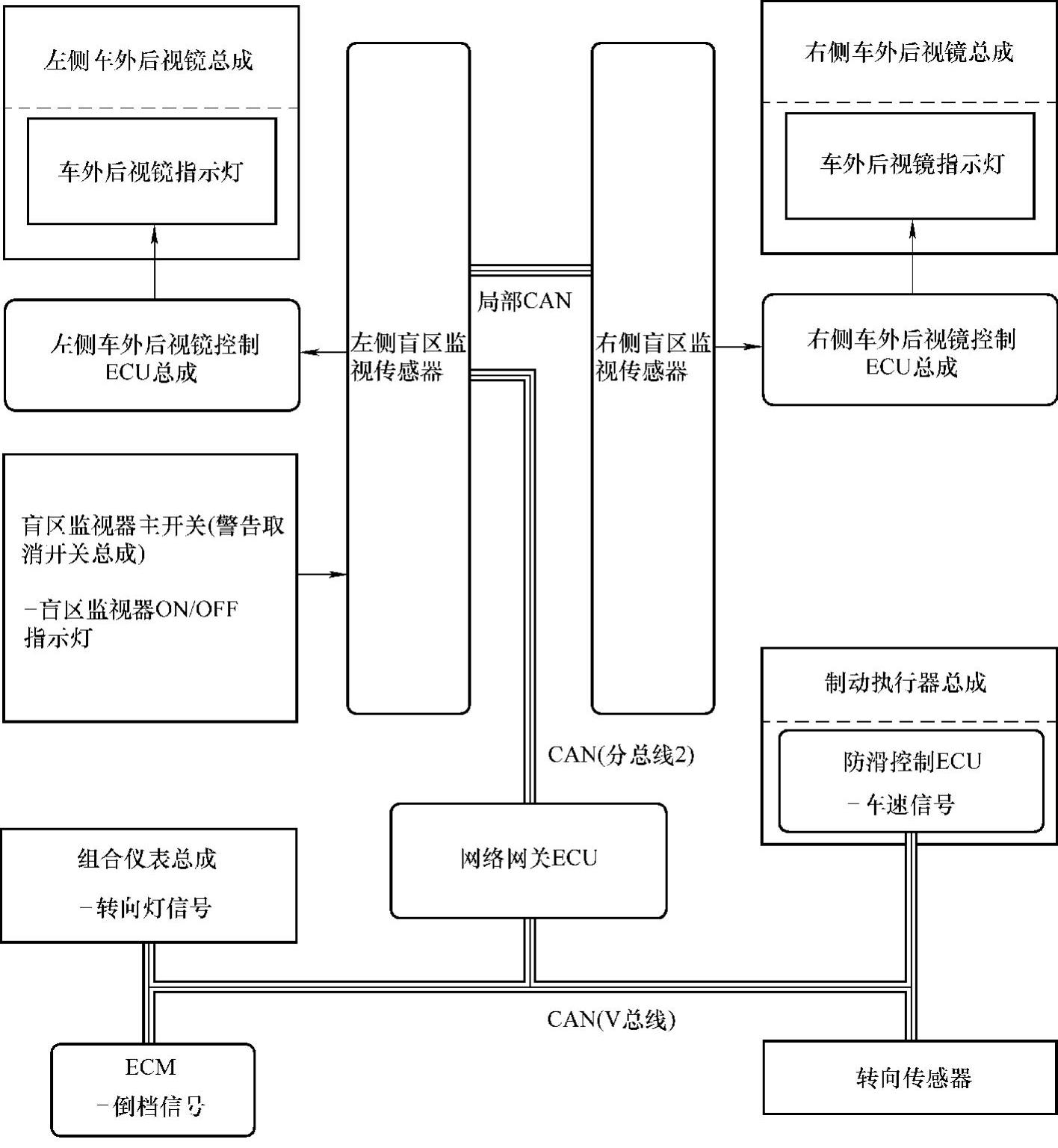
图1-52 工作原理控制图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。