



汽车车轮定位主要是前轮定位(即转向轮定位)。但是,也有一些轿车和货车后轮也有定位,即四轮定位。汽车车轮定位的检测方法,有静态检测法和动态检测法两种类型。静态检测法是在汽车停止的状态下,使用测量仪器对车轮定位进行几何角度的测量,使用的检测设备有气泡水准式、光学式、激光式、电子式和微机式等车轮定位仪。动态检测法是在汽车以一定车速行驶的状态下,用测量仪器或设备检测车轮定位产生的侧向力或由此引起的车轮侧滑量。动态检测使用的检测设备主要有滑动板式侧滑试验台和滚筒式车轮定位试验台两种。目前,国内几乎全部采用滑板式侧滑试验台进行动态检测。
1.转向轮定位的静态检测
汽车转向轮的定位值(包括转向轮外倾角、转向轮前束值、主销后倾角、主销内倾角4个参数),是评价汽车的操纵性和直线行驶稳定性的重要参数。转向轮定位参数的静态检测设备有气泡式水准仪、光学式或激光式或电子或计算机式车轮定位仪,这些设备一般是利用前轮旋转平面与各定位角间存在的直接或间接关系进行测量的,其中气泡式水准仪的应用最为广泛。
气泡式水准仪主要由水准仪、支架和转盘组成,如图3-85所示,可测得前轮外倾角、主销后倾角和主销内倾角。
(1)检测前的准备
1)汽车载荷应符合该车原设计值。
2)轮胎气压符合规定,轮胎花纹磨损均匀。
3)车轮轮毂轴承、转向节主销不允许松动。
(2)前束的检测 测量前束值用前束尺。前束尺由一根带套筒的可调尺杆、指针和支架等组成,测量方法如下:
1)将车桥支起,使转向轮能自由转动,把划针调到轮胎轴心高度,对准胎冠中心,转动车轮,划出胎冠中线,如图3-86所示。
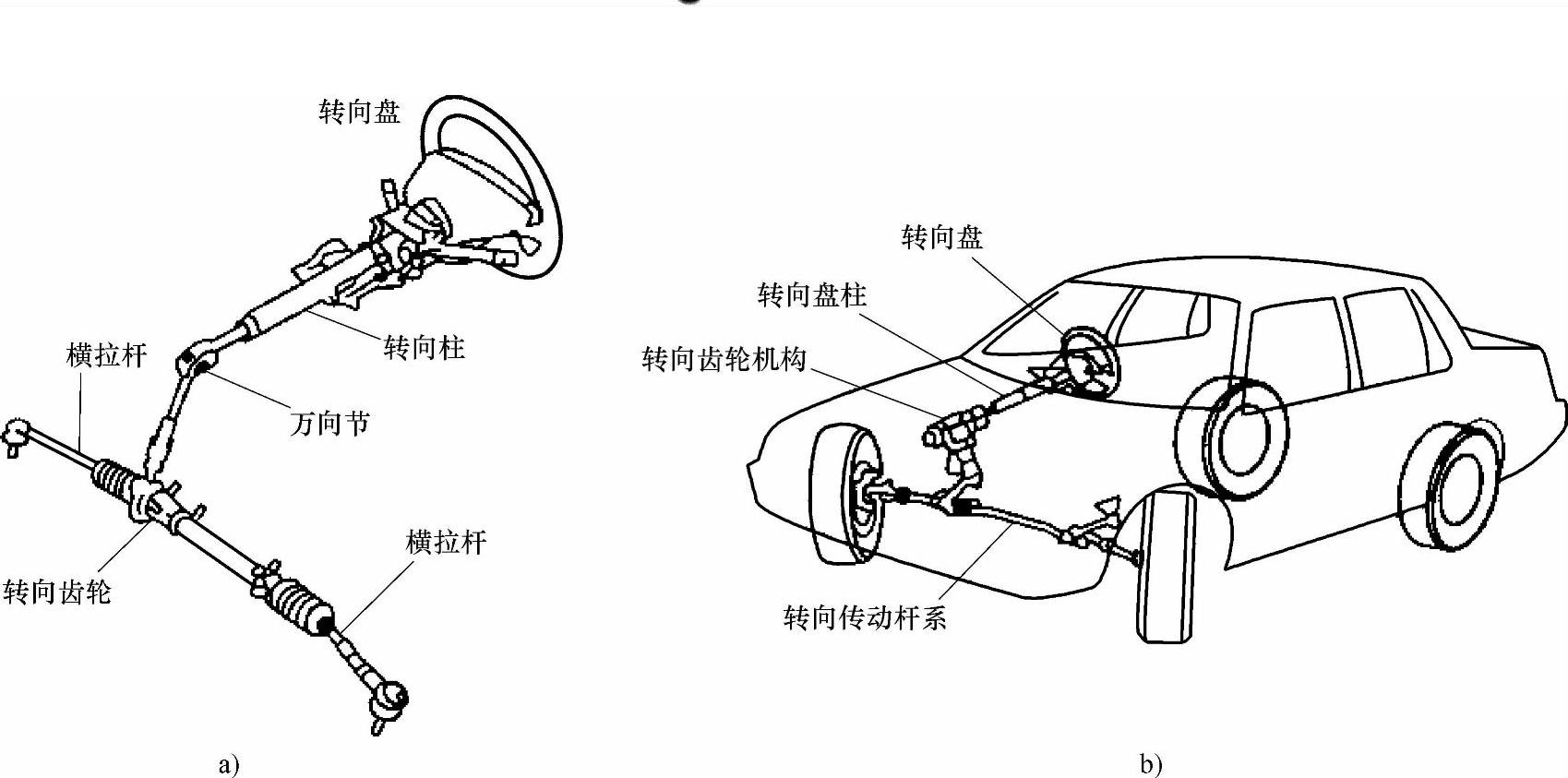
图3-84 转向系统的结构与布置
a)齿轮齿条式转向装置 b)循环球螺母式转向装置
2)车轮落地,在轮胎轴心高度,调整前束尺两指针,使之分别指向左右车轮后方的胎冠中心线,调整前束尺的刻度标尺使之对“0”。
3)将前束尺移至被测车轮前方,调整前束尺长度,使两指针分别指向左右车轮前方的胎冠中心线,此时前束刻度标尺的指示值即为被测车轮的前束值。
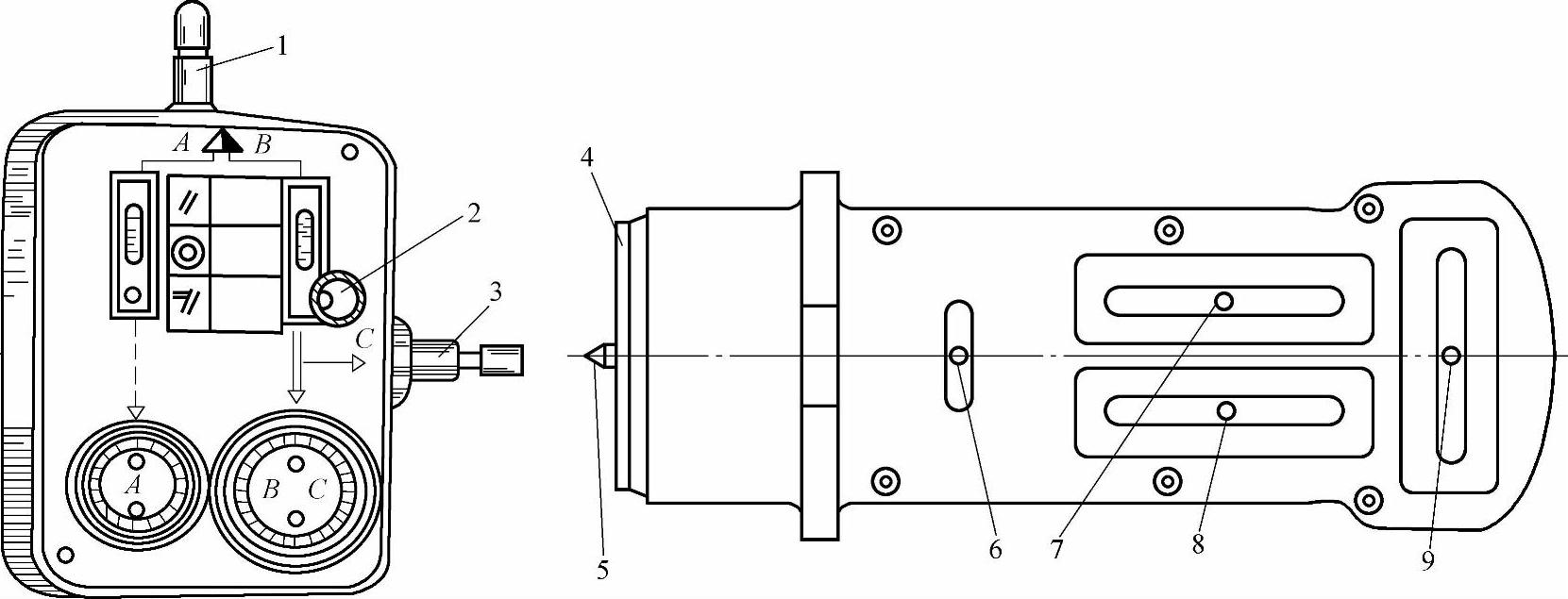
图3-85 气泡式水准仪
1、3—定位销 2—旋钮 4—永久磁铁 5—定位针 6—校正水准仪水平状态的水泡管 7—测量主销后倾角的水泡管 8—测量前轮外倾角的水泡管 9—测量主销内倾角的水泡管
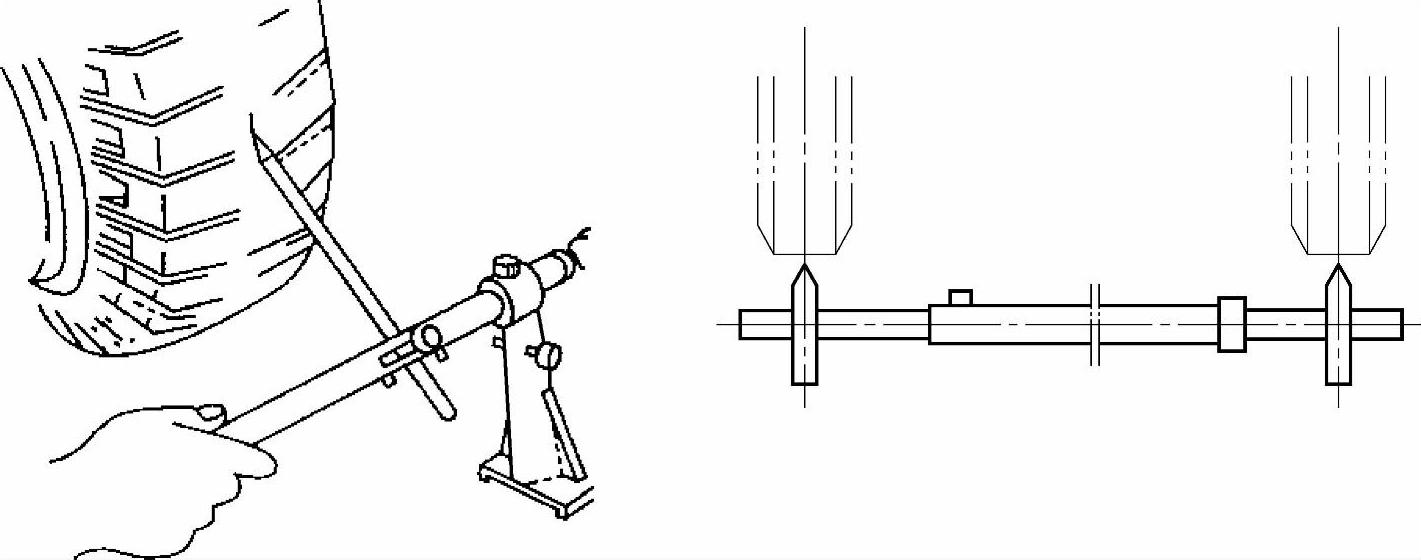
图3-86 前束尺测量前束
(3)车轮外倾角的检测 测量车轮外倾角用水准仪,如图3-87所示。测量方法如下:
1)被测车轮呈直线行驶位置。
2)将水准仪吸附在被测车轮的轮毂端面上。
3)调整水准泡处于中间位置。
4)水准仪上外倾角水准气泡指示值即为被测车轮外倾角读数。
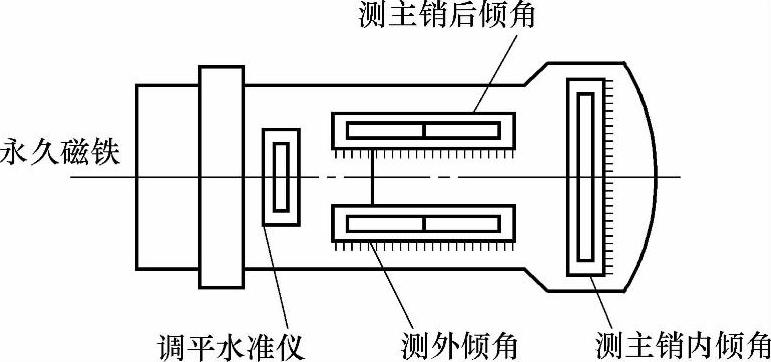
图3-87 气泡式水准定位仪
(4)主销后倾角、主销内倾角的检测 主销后倾角、主销内倾角的检测需要车轮转动一定角度才能测量,故测量时需要配备车轮转角仪。测量方法如下:
1)安装转角仪,使前后轮调整至处于同一水平面。
2)安装水准仪。
3)将车轮向内转20°,调整好水准泡。
4)将车轮向反方向转40°,此时定位仪上后倾角水准器和内倾角水准器气泡所示值即为被测车轮的主销后倾角、主销内倾角度值。
2.四轮定位的检测
为适应汽车高速运行状态下的稳定性和舒适性要求,现代汽车广泛采用四轮独立悬梁。为使汽车具有良好转向特性,除对转向轮定位外,部分轿车还具有后轮前束和外倾角等参数,称为四轮定位。
四轮定位的前、后轮定位参数依赖于悬架机构有关部件的相互位置在一个统一基准(线或面)上的合理匹配,以实现转向行驶系统的稳定效应,使汽车具有良好的行驶平顺性和操纵稳定性。只有当前、后轮定位参数均按标准值调整得当时,才能保证汽车转向精确、运行平稳、行驶安全、降低油耗并减轻轮胎磨损。
在汽车行驶中如出现下列情况时,需进行四轮定位的检测和调整:
1)直线行驶困难。
2)前轮摇摆不定,行驶方向漂移。
3)轮胎出现异常磨损。
4)汽车更换悬架系统、转向系统有关部件或前部经碰撞事故维修后。
(1)四轮定位检测项目 四轮定位的检测项目包括转向轮前束值/角及前张角、转向轮外倾角、主销后倾角、主销内倾角、后轮前束值/角及前张角、后轮外倾角、轮距、轴距、转向20°时的前张角、推力角和左右轴距差等,如图3-88所示。
(2)检测原理 不同类型的四轮定位仪所采用的检测方法、数据记录与传输的方式不同,但基本检测原理一致。
1)前束和左、右轴距差的检测。检测时,将车体摆正并把转向盘置于中间位置。为提高检测精度,四轮定位仪通常通过拉线、光线照射及反射或蓝牙传输等方式形成一封闭的直角四边形,并将被测车辆置于该四边形中,如图3-89所示。通过安装在车轮上的光学面或传感器,不仅可检测前轮的前束值,还可检测同一轴上左、右车轮的同轴度及推力角。
安装在车轮上的传感器有不同类型,以光敏晶体管式传感器为例介绍其检测原理。安装在两转向轮和两后轮上的传感器均有接收光线和发射光线功能,光线发射与接收刚好能形成图3-89所示的四边形。传感器的受光平面上等距离地排列有一排光敏晶体管,当不同位置上的光敏晶体管受到光线照射时,所发出的电信号即可代表前束值/角或左、右轮轴距差。
当前束为零时,同一轴左、右车轮上的传感器发射(或反射)出的光束应重合,当检测出上述两条光束相互平行但不重合时,说明车轮发生了错位,使得左、右车轮上不同轴,依照光敏晶体管发出的信息可测量出左、右轮的轴距差。
当左、右车轮存在前束时,左轮传感器上接收到光束位置相对于原来的零点有一偏差值,该偏差值表示右侧车轮的前束值/角;同理在右侧传感器上接收到的光束位置相对于原来零点的偏差值,则表示左侧车轮的前束值/角。车轮前束值/角的检测原理如图3-90所示。
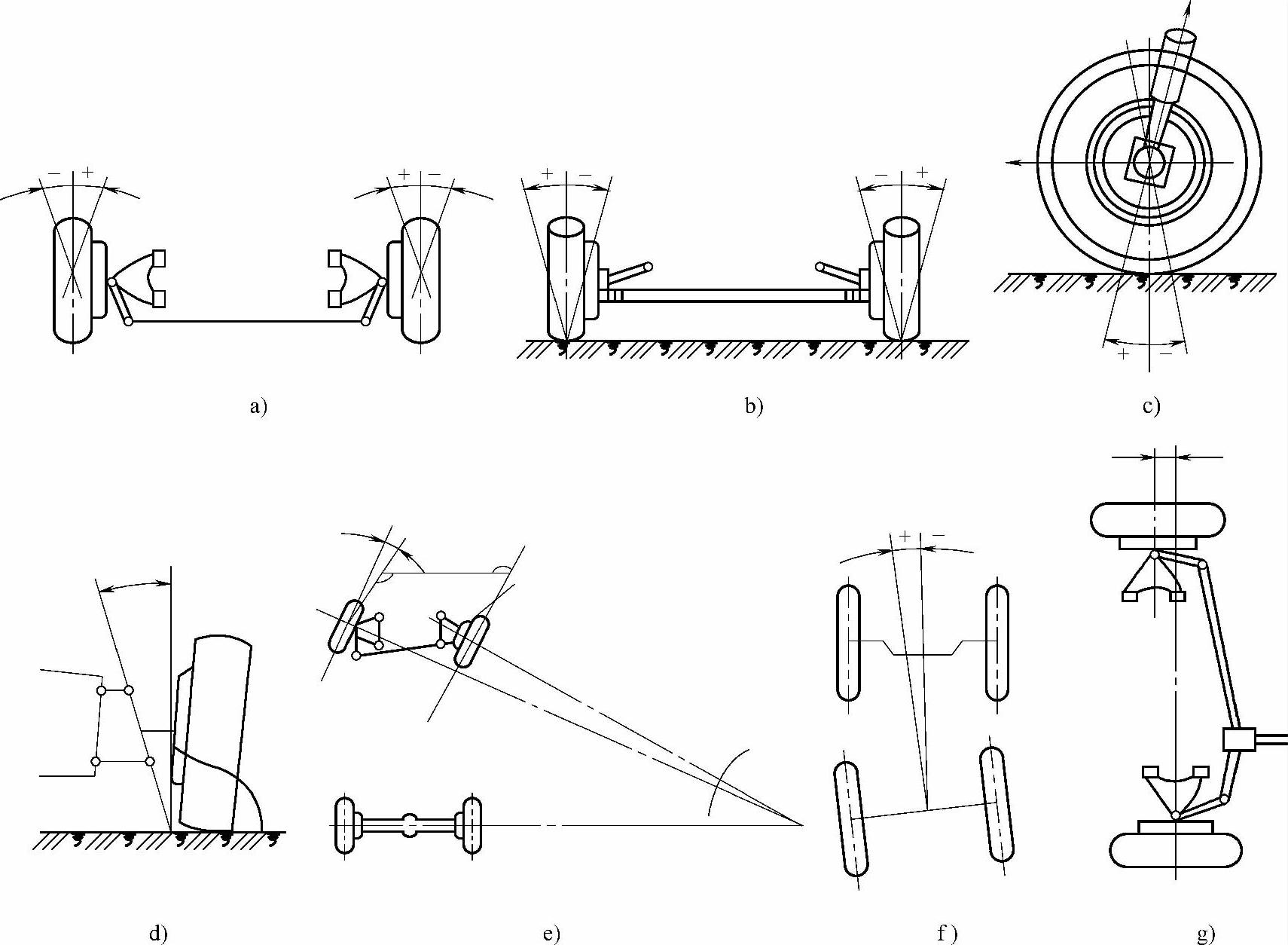
图3-88 四轮定位的检测项目
a)车轮前束值和前张角 b)四轮外倾角 c)主销后倾角 d)主销内倾角 e)转向20°时的前张角 f)推力角 g)左右轴距差(https://www.xing528.com)
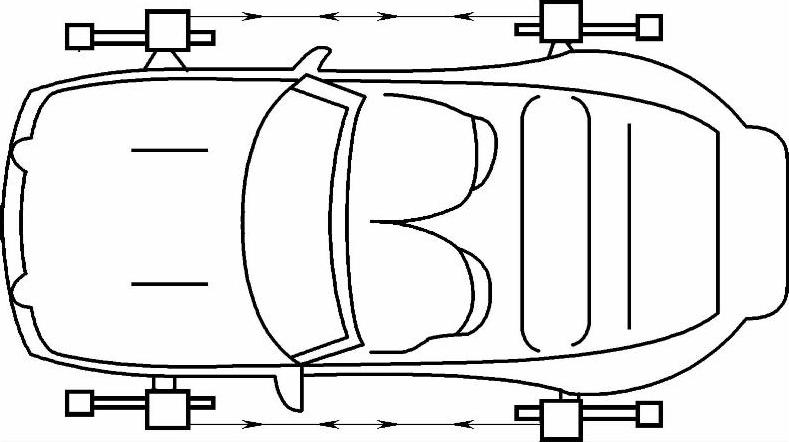
图3-898 束光线形成的封闭直角四边形
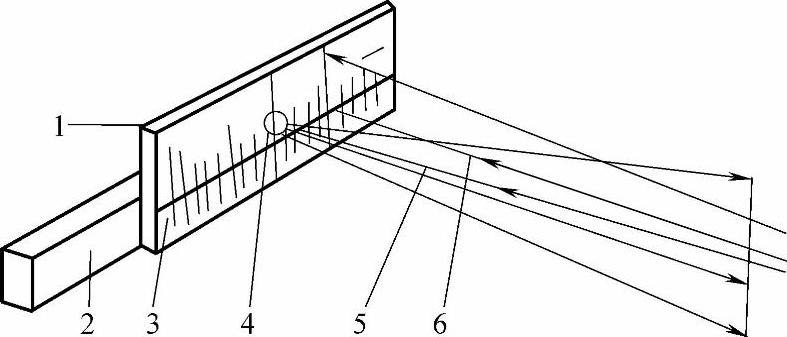
图3-90 车轮前束值/角检测原理
1—刻度板 2—投射器支臂 3—光敏晶体管 4—激光器 5—投射激光束 6—接收激光束
2)推力角检测。后轮行进方向(即推力线)与汽车的纵向几何中心线之间形成的夹角,称为推力角,如图3-91所示。推力角并非设计参数,而是一种故障状态参数。汽车行驶时,后轮沿推力线给汽车一纵向的偏转转矩,导致轮胎磨损异常磨损、汽车容易偏离其直线行驶方向,严重时将发生后轴侧滑、甩尾等危险状况。推力角通常接近零度,可以通过调整后轮的个别前束来调整推力角。
一般规定推力线朝右为正,朝左为负。推力角的检测原理如图3-92所示。当推力角为零时,前后轴同侧车轮上的传感器发射或接受的光束应重合,当两条光束出现夹角而不重合时,则说明推力角不为零。为此,可以用安装在汽车前轮上的传感器接收到的后轮传感器发射光束相对于零点位置的偏差值来检测推力角的大小。
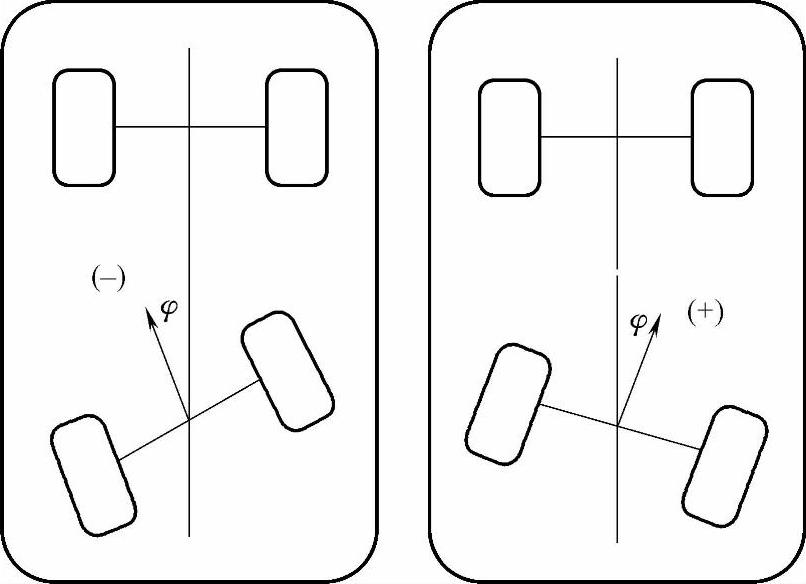
图3-91 推力角定义
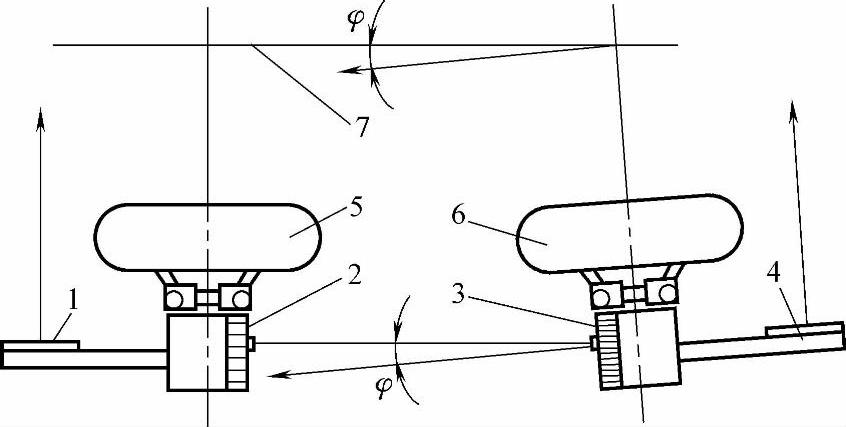
图3-92 推力角检测原理
1、2、3、4—光线接收器 5—转向轮 6—后轮 7—汽车纵向中心线 φ—推力角
3)车轮外倾角检测。车轮外倾角可在车轮处于直线行驶位置时直接测得。在四轮定位仪的传感器(定位校正头)内装有角度测量仪(如电子倾斜仪),把传感器装在车轮上,可直接测出车轮外倾角。
4)主销后倾角与主销内倾角。主销后倾角和主销内倾角不能直接测出,只能采用建立在几何关系上的间接测量。若存在主销后倾角时,则在车轮向右转20°和车轮向左转20°两个位置时,车轮平面会发生倾角变化,该倾角变化可由传感器的角度测量仪测出。同理,若存在主销内倾角,则在车轮向右转20°和车轮向左转20°两个位置时,垂直于车轮旋转平面内将发生倾角变化,该倾角变化也可由传感器内的角度测量仪测出。
5)转向20°时前张角检测原理。汽车使用中,因转向轮长期在凹凸不平的路面上行驶和经常使用紧急制动等,使转向轮经常受到碰撞和冲击而引起汽车转向梯形臂变形,造成汽车在转向行驶过程中转向轮的轮胎异常磨损、操纵性变差,影响汽车的安全性。为了检测汽车的转向梯形臂与各连杆是否发生变形,在四轮定位检测中设置了转向20°时前张角的检测项目。
检测前张角时,使被检车辆转向轮停在转盘中心,转动转向盘使右转向轮右转20°后,读取左转向轮下转盘上的刻度值θ1,20°-θ1即为向右转转向20°时的前张角;使左转向轮沿直线行驶方向向左转20°后,读取右转向轮下转盘上的刻度值θ2,20°-θ2即为向左转向20°时的前张角。
(3)四轮定位仪及其使用方法 目前使用的四轮定位仪有拉线式、光学式、微机拉线式、微机激光式和微机蓝牙式等多种,它们的测量原理基本是一致的,但不同类型的四轮定位仪的使用方法有一定的差异,因此应严格按使用说明书的要求和方法进行操作。下面以微机式四轮定位仪为例,说明四轮定位仪的使用方法。
微机式四轮定位仪由主机、显示器、打印机、前后车轮检测传感器、传感器支架、转盘、制动锁、转向盘锁及导线等零件构成。配有专用软件和数据光盘,可读取近10年来世界各地汽车四轮定位参数,且可更新。还配有数码视频图像数据库,显示检查和调整位置等。图3-93a所示为微机式四轮定位仪主机外形图。
为便于检测和调整,被检汽车需放在地沟上或举升平台上,地沟或举升平台应处于水平状态,四轮定位仪则安装在地沟两旁或举升平台上,如图3-93b、图3-93c所示。
1)在检测汽车的四轮定位时,被检车辆应满足以下要求:
①前后轮轮胎气压及胎面磨损基本一致。
②前后悬架系统的零部件完好、不松旷,减振器性能良好。
③转向系统调整适当,不松旷。
④汽车前、后高度与其标准值的差不大于5mm。
⑤制动系统正常。
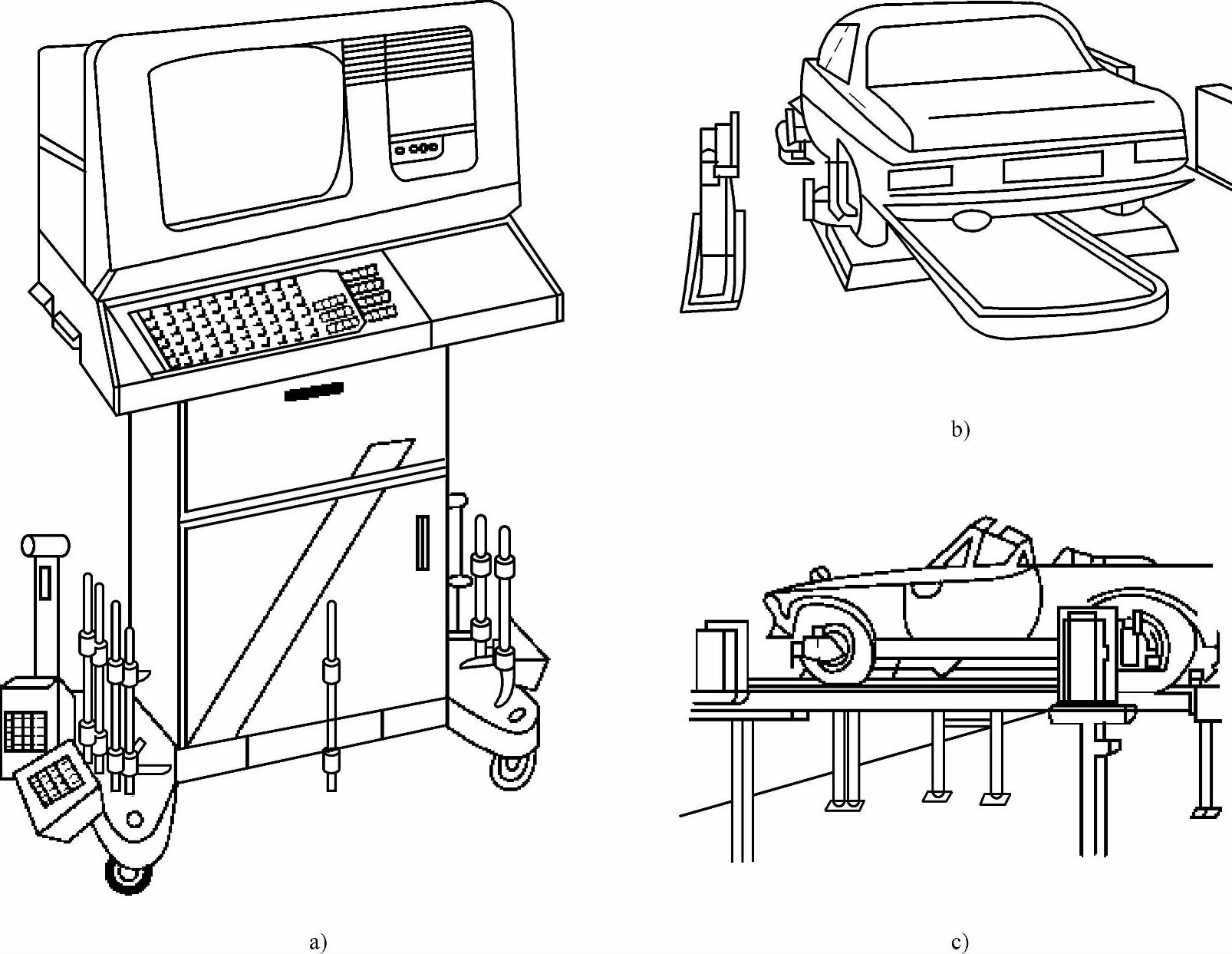
图3-93 四轮定位仪外形及安装图
a)四轮定位仪外形 b)四轮定位仪安装在地沟旁 c)四轮定位仪安装在举升平台上
2)检测前准备:
①把汽车开上举升平台,托住车轮,把汽车举升0.5m(第一次举升)。
②托住车身,把汽车举升至车轮能自由转动(第二次举升)。
③拆下各车轮,检查轮胎磨损情况,要求各轮胎磨损基本一致。
④检查轮胎气压,使其符合标准值。
⑤做车轮动平衡试验,动平衡完成后,将车轮装回车上。
⑥检查车身高度,检查车身4个角的高度和减振器技术状况,如车身不平应先调平,同时检查转向系统和悬架是否松旷,如松旷则应先紧固或更换零件。
3)检测步骤:
①把传感器支架安装在轮辋上,再把传感器(定位校正头)安装到支架上,并按使用说明书的规定调整。
②开机进入测试程序,输入被测汽车的车型和生产年份。
③进行轮辋变形补偿,转向盘位于直驶位置,使每个车轮旋转一周,即可把轮辋变形误差输入计算机。
④降下第二次举升量,使车轮落到平台上,把汽车前部和后部向下压动4~5次,使各部位落到实处。
⑤用制动锁压下制动踏板,使汽车处于制动状态。
⑥将转向盘左转至计算机显示“OK”,输入左转角度数;然后将转向盘右转至计算机显示“OK”,输入右转角度数。
⑦将转向盘回正,计算机显示出后轮的前束及外倾角数值。
⑧向下调整转向盘,并用转向盘锁锁止转向盘,使之不能转动。
⑨将安装在4个车轮上的定位校正头的水平仪调到水平线上,此时计算机显示出转向轮的主销后倾角、主销内倾角、转向轮外倾角和前束的数值。计算机将比较各测量数值,得出“无偏差”、“在允许范围内”或“超出允许范围”的结论。
⑩若“超出允许范围”,按计算机提示的调整方法进行针对性调整。调整后仍不能解决问题,则应更换有关零部件。
⑪再次压试汽车,将转向轮左右转动,观察屏幕上数值有无变化,若有变化应重新调整。
⑫拆下定位校正头和支架,进行路试,检查四轮定位调整的效果。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。