



巡航通常有定速巡航和自适应巡航两种模式。自适应巡航能防止巡航追尾,但通常需要雷达测距。这里讨论定速巡航,即车辆保持按巡航按钮时的车速行驶。很多发动机控制器已经包含定速巡航功能,对于这些系统AMT就不需要另搞一套。对于发动机没有这个功能的系统,AMT系统可以很容易实现定速巡航。
巡航控制是通过调节驱动动力源的输出转矩大小来实现的,如汽油机通过调节节气门的开度,电动汽车通过调节驱动电动机的电流大小。系统上电时通常预置为正常行驶,即不巡航,当驾驶人选择巡航模式时,按下巡航按键即可。如想要取消巡航模式,通常的方法是再按一次巡航键、踩加速/制动踏板或将变速杆换到自动档以外的任何位置即可。
TCU记住按巡航按钮时的车速,然后尽量维持该车速不变直到驾驶人取消巡航。由于负荷的变化,在巡航情况下,也有可能会发生自动换档。所谓负荷的变化,大部分是因为上坡和下坡造成的,但在上大坡和下大坡的过程中要避免循环换档。
当车速低于某一设定值时,可以禁止巡航。
在汽车急转弯时,通常要减速,否则会发生危险。因此,遇到转弯信号时,为安全起见,车速应自动做出相应调整,不一定保持原定车速。
有些系统可以在自动巡航中改变巡航速度。对于AMT车,也可以利用变速杆上的+/-进行加减巡航速度,但这容易使驾驶人将手动+/-档的作用混淆。
车辆能巡航的最高速度和坡度基本上取决于发动机在该车速下能输出的最大转矩。发动机的输出功率在很大范围内基本上是随转速的增长而增长,但是不同档位下,同样的发动机转速对应着不同的车速,传递到车轮的转矩也不同。图15-2所示为某动力链在不同档位下的输出特性。从图15-2可以看出,要想得到大功率输出,必须尽可能使用低档位。这意味着使用发动机的高速区。图15-2中显示车速可超过200km/h,但实际上除了跑车外最高车速一般不需这么高。以图中100km/h来分析,如使用5档,那么发动机的最大输出功率约为32kW。如用4档,那么发动机的最大输出功率约为38kW。如用3档,那么发动机的最大输出功率将超过65kW。
①车辆的行驶阻力和载荷成正比,和车速的平方成正比,并随路面坡度的增大而增大。显而易见,同在100km/h的巡航车速,那么使用3档就能比使用4档能爬更陡的坡,但此时发动机转速很高,噪声可能会很大。其他类推。
②当行驶阻力大于发动机作用到车轮上产生的驱动力时,车辆降速就在所难免。图15-2中的变速器输出功率曲线和行驶阻力消耗功率相等时就(https://www.xing528.com)
由外特性曲线可见,发动机的最大输出转矩不但不和发动机转速成正比,甚至还不成单调上升关系。图15-3中最大输出转矩出现在4500r/min左右的转速转矩约为133Nm。如果此时的行驶阻力大于发动机输出133N·m时在车轮上产生的驱动力,那么车辆一定减速,发动机也减速。从图15-3可以看出,发动机一减速,输出转矩更小,减速会更严重。这样在该档位就不能维持巡航速度。
也就是说,如节气门全开、车速还低于需要的巡航速度xkm/h、这种情况的持续时间大于y、降档后发动机转速小于最高允许转速,那么巡航档位应该降1档以提高发动机转速,进而提高发动机输出。
但是发动机并不一定要到达节气门全开才输出最大转矩,在接近节气门全开前,发动机有可能已经输出或接近输出最大转矩。一般来说,节气门开度从全关闭的情况下慢慢打开,发动机的输出转矩开始增长很快,但到超过50%后,输出转矩增长就很慢,甚至不变。在不同转速下,到达最大转矩95%时的最小节气门开度可能不同。也就是说,如果一定要等到节气门全开才降档就会延误降档的时间而造成较长时间车速偏低。为解决这个问题,可采用查表法找出需要降档的节气门开度。
前面讲过,路面坡度对车辆行驶阻力的影响是很大的。这可从图15-4所示进行计算。
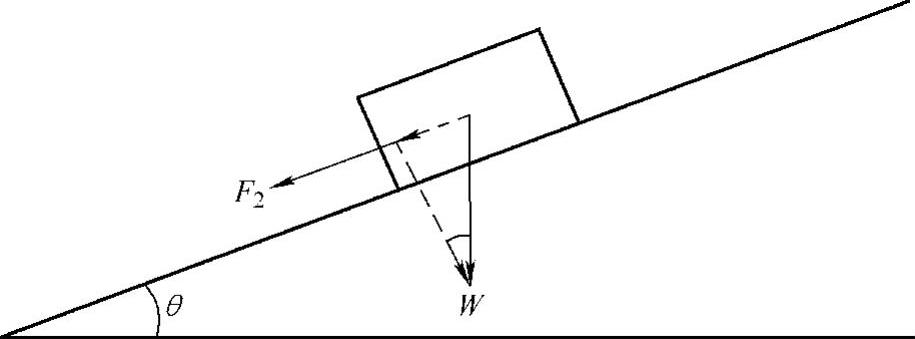
图15-4 路面坡度车辆受力分解图
图15-4中W为车辆重量,θ为路面角度。比如一辆1t的车辆停在5°的路面上,那么1t的重力可分解成为F1=1000×cos(θ)×9.8=9760.8N垂直于路面的压力,这比平坦路面时的正面压力要小些。F2=1000×sin(θ)×9.8=852.6N的下滑力。一个5°的斜坡等于8.7%的坡度,可见,坡度给车辆增加了不少行驶阻力。这个由于路面坡度造成的阻力大小和车辆的速度没有关系,速度越低,路面坡度引起的阻力所占车辆行驶总阻力的比例越大,因此感觉起来坡度的影响会更大。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。