



坡度的大小对倒溜的程度有很大影响,不同的坡度最好有不同的应对措施或不同强度的应对措施。因此,AMT希望能够实时了解现行路面的坡度大小。对于装备VSC的车辆,如果VSC能够通过CAN总线向TCU提供实时坡度信号,就使问题大大简化了。如果没有外系统的坡度信号输入,如何在运动中探测车辆行驶路面的坡度呢?一个方法是TCU使用坡度传感器进行直接探测;另一个方法是根据牛顿定律和空气动力学,通过实时发动机输出转矩和车辆加速度等变量来进行计算和推测坡度的大小。
正如前面所说,可以通过实时发动机输出转矩和车辆加速度来计算坡度大小,但是在车辆静止时,坡度信号就不能由这个方法计算直接取得,因为汽车在起步前是处于静止状态,用于坡度探测的实时信号如车速为零,体现不出坡度大小的影响,软件也就无法在静止状态探测到坡度。当然,如果车辆在熄火后没有被移动,那么起步时的坡度应该和熄火时的一致,这样可以使用在熄火前存储的坡度信号。但是,如果车辆在熄火后被移动,就不能使用存储的信息,不过这个可能性比较小。设计AMT控制系统时,小概率事件也要考虑,但如果牵涉安全问题,必须妥当处理。这里所说的安全问题有:熄火前在上坡路面停车或熄火后拖车停在下坡道上等。因为用存储的坡度数据来控制自动起步,那么就会导致起步时离合器接合得比较深,以克服上坡引起的倒溜下滑力,结果实际是下坡,结果车辆会急速前冲,从而可能造成危险。
起步时,一旦TCU知道车辆所在路面的坡度大小,TCU就能确定离合器接合的深度以保证离合器能传递足够的驱动力使车辆不倒溜。当然要保证离合器能输出足够的驱动力,还要保证发动机能提供足够的转矩,也就是说TCU必须自动增加节气门开度来满足起步时对动力的需求。上坡坡度越大,离合器接合的深度就越深,发动机输出的转矩要越大,否则车辆不但不起动,反而会熄火。如果下坡坡度大,发动机要拖住车辆,所以离合器也要快速接合,但同时发动机不能给油。这样,就无须驾驶人来确定制动踏板的位置,TCU可以自动完成。
 (https://www.xing528.com)
(https://www.xing528.com)
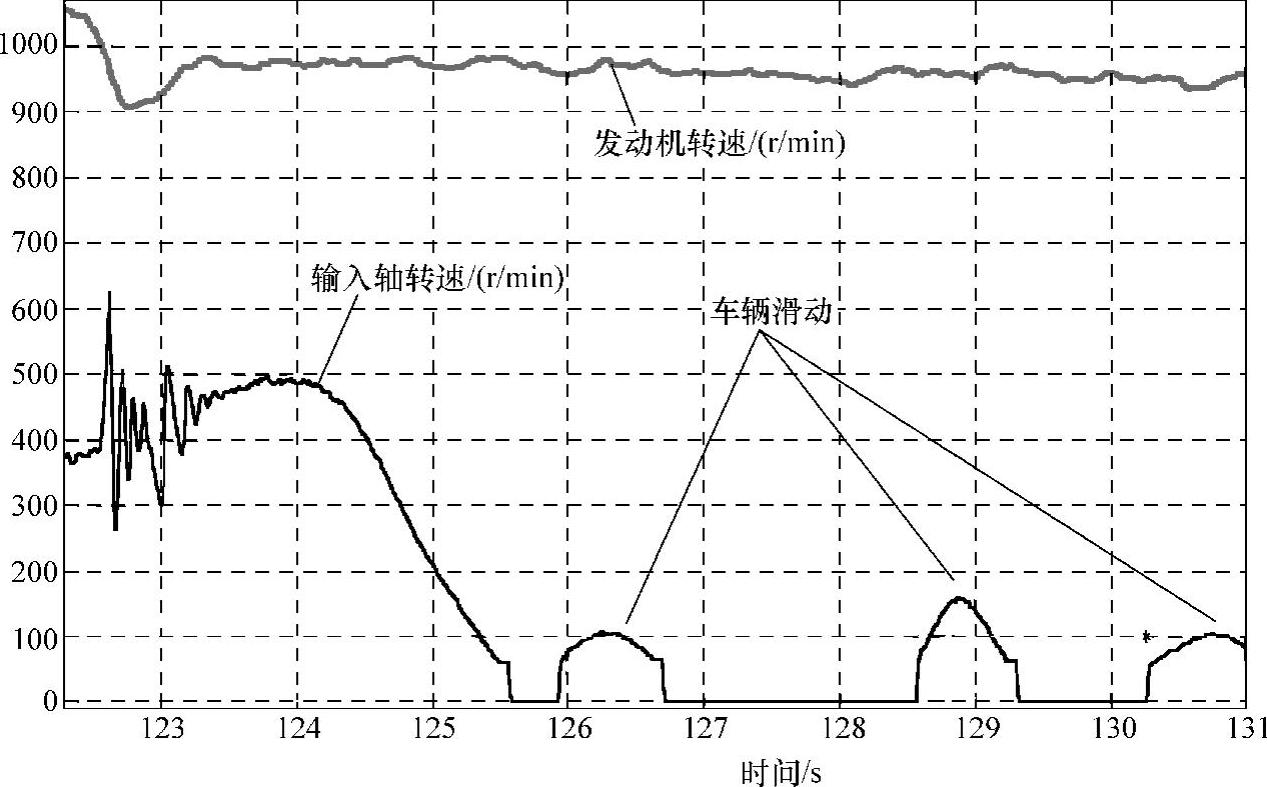
图10-7 起步倒溜信号
图10-7中,制动信号显示制动踏板没有松开,但是输入轴已有三次旋转,这表明车辆在斜坡上滑动倒溜。虽然当时有制动信号表示已刹车,但驾驶人实际上已经松了一点制动(使得制动力不大),抵抗不了重力的作用而下滑。当制动力大一些的时候,汽车就停住了。开关式制动信号不能区分制动力的大小,又不知道坡度的大小,也不知道是在前进还是在倒溜,所以不能使TCU发挥作用。
使用坡度传感器探测坡度的方法会使这个问题变简单,但坡度传感器比较贵。再有,起步时驾驶人必须尽快松开制动踏板,这会给驾驶人造成心理压力。如没有驻车制动的配合,也没有采用模拟制动信号提前接合离合器,那么在驾驶人松开制动踏板和离合器能提供足够的驱动力之前,汽车还是会倒溜的。因此,装坡度传感器只能改善这种情况,但不能彻底解决倒溜问题。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。