



不管发动机输出转矩是降低还是增加,在给出目标转矩后,TCU还要能有效控制发动机跟踪好这个目标转矩。正如前面所提到的,根据系统的不同,有不同的方法对发动机的输出转矩进行控制。
在允许TCU和ECU通信的情况下,TCU只在需要时直接将理想转矩传递给发动机控制器(ECU),具体由ECU去实施。TCU要求ECU能在一定时间内将发动机的转矩单调、稳定地调节到理想值,允许误差也要在允许范围之内。转矩振荡会导致变速器啮合齿轮来回摇摆,从而产生冲击和噪声,但是微幅度的晃动还可能有利于摘档和挂档。在不换档不起步的通常工作模式下,可由ECU直接控制发动机转矩。新能源车就直接和电机控制器通信。
在TCU无法和主动力控制器(ECU或MCU)通信的情况下,就无法将希望的转矩通知到主动力控制器。对于有电子加速踏板的系统,TCU可以通过改变加速踏板的信号来实现调节主动力输出转矩,即TCU取代电子加速踏板,输出一个和加速踏板兼容的信号给发动机控制器或电机控制器。
对于在TCU无法和发动机控制器通信的情况下,又没有电子加速踏板的系统,TCU只能用电动拉索机构取代加速踏板拉索机构来调节节气门开度。它不仅在换档时要控制发动机转矩,在不换档时也要控制发动机转矩。
无论采用哪种方式控制发动机,都可以归结为给出理想的发动机转矩或理想转速,然后控制发动机去跟踪这个目标。下面分别讨论这几种方式。
(1)CAN通信控制
CAN通信比较简单。只要将理想的转矩或转速通过CAN总线发给发动机控制器或电机控制器就可以了。
(2)加速踏板位置控制
如果已知理想的发动机输出转矩,那么根据加速踏板位置和发动机转矩曲线关系可以找到对应的理想加速踏板位置。这样可以通过TCU中一个模拟信号输出对应的加速踏板电压作为发动机控制器的输入,发动机控制器接收这个电压信号后就提供相对应的输出转矩。在不换档时,模拟信号的输出电压和加速踏板位置传感器的输出电压一致。通过加速踏板信号和通过CAN通信控制发动机转矩的区别就是反应速度的快慢。通过改变加速踏板的输出电压到ECU接收到这个信号需要时间,传递路径上通常都有滤波,所以和CAN通信相比,改变输出电压所体现出来的发动机的反应速度就显得比较慢些。另外,许多MCU自身不带数字-模拟(D-A)转换通道,需要外加数-模转换的芯片。为了安全起见,在设计上要确保TCU不工作时,D-A转换电路的输出电压和加速踏板放松时位置传感器的电压一致。TCU工作时应该实时检查D-A的电压值以确保输出正常,以防D-A转换芯片在故障状态下输出不希望的电压值。
(3)节气门开度控制
在没有电子节气门的汽油机车辆上,节气门开度大小的调节是靠机械式加速踏板所连接的拉索所控制的。这比前两个方法复杂些,因为在前两个方法中,ECU承担了自动调节节气门的工作。在较老的带有机械式节气门的车辆上,为了在换档时自动控制发动机的转矩输出,AMT系统只能增加一个电子控制的拉索机构去自动地拉动节气门,所以驾驶人控制的是一个电子加速踏板。在正常驾驶时,自动拉索机构跟随加速踏板的位置来控制节气门开度的大小。在换档时,自动拉索机构不再跟随踏板位置,而是根据换档时所需的理想发动机输出转矩来控制节气门的开度。一般来讲,车辆上的节气门开度位置传感器信号直接提供给发动机控制器而不让其他系统分享,所以AMT不能得到节气门开度的实际具体位置。在这种情况下,AMT里的电子节气门开度控制只能是开环控制。如果拉索机构的位置和电子节气门开度的位置能保证一一对应,那可用拉索机构的位置信号进行反馈控制,也就是电子节气门开度闭环控制。但这只是一种假设,在实际控制中必须考虑它的不一致性。
正如上面说到的,加速踏板信号的可靠性十分重要。加速踏板拉索机构不应该存在任何形式的自锁或卡死,它必须能自由回位关闭,尤其在系统失电或在MCU损坏时能自由回位关闭。
调节节气门开度实际上是调节发动机喷油量。因此在汽车的正常行驶中(非换档中),节气门的开度始终要跟随驾驶人的加速踏板,即为一个随动跟踪系统。但是在换档过程中或者巡航功能开启后,节气门的开度又不能对加速踏板进行跟踪以避免换档时发动机轰响影响巡航。所以节气门拉索的控制程序要实现两种功能:在非换档过程中跟随驾驶人的加速踏板;在换档过程中或者巡航时,MCU根据要求给定节气门的开度以控制发动机转矩的大小。所以节气门的总目标开度取决于加速踏板(ETCpedal)、换档补偿(ETCshift)和巡航控制(ETCcruise)。
ETCopen=ETCpedal+ETCshift+ETCcruise
在不巡航时,ETCcruise=0。在巡航时,ETCcruise的初始值=ETCpedal,然后ETCpedal=0。在换档时,ETCpedal=0,ETCcruise=0。
对于汽油机,改变节气门的开度就改变了发动机的进气量,ECU会根据进气量的大小准确控制喷油量来实现最佳燃烧和最低排放,理想空气和燃油的质量之比为14.7∶1。所以发动机的输出转矩和节气门的开度有着十分密切的关系。发动机的转矩控制基本上依赖于对节气门开度的控制,当然改变空燃比和点火角也能有效控制发动机输出转矩的大小。柴油机对空燃比没有很高的要求,柴油可以在很宽的空燃比下稳定燃烧。对于柴油机的转矩控制就简单地依赖于对喷油量和EGR的控制等。
因为没有转矩传感器对输出转矩进行精确测量,所以发动机的转矩控制几乎都是开环控制。大部分ECU是根据新发动机的数据确定在每个工况下的输出转矩。随着时间的变化,这个估计值可能和发动机的实际输出转矩有很大差别。这在设计AMT控制之初就应该充分考虑到,这样才能真正跟踪到转矩目标值。
不管采用什么方法控制发动机的输出转矩,目标都是要求发动机的实际输出转矩应该尽量接近目标转矩。最好要补偿发动机的损耗和发动机的老化带来的输出转矩下降问题,使得真正的输出转矩是系统所需要的转矩。因为没有简便的反馈闭环控制方法,所以精确控制有较大难度。解决办法之一是自学习,通过自学习自动调节节气门开度来补偿。
在AMT换档中,最常用的发动机转矩控制是在打开离合器时的降转矩和接合离合器时的升转矩。看起来降、升转矩很简单,但是控制不当,很容易引起换档时发动机转速飙升、点头或冲击。下面介绍一些换档时控制发动机输出转矩的实例。(https://www.xing528.com)
图6-5是一个发动机转矩控制得不好的路试实例。在t=263.9s时开始换档,在此之后:
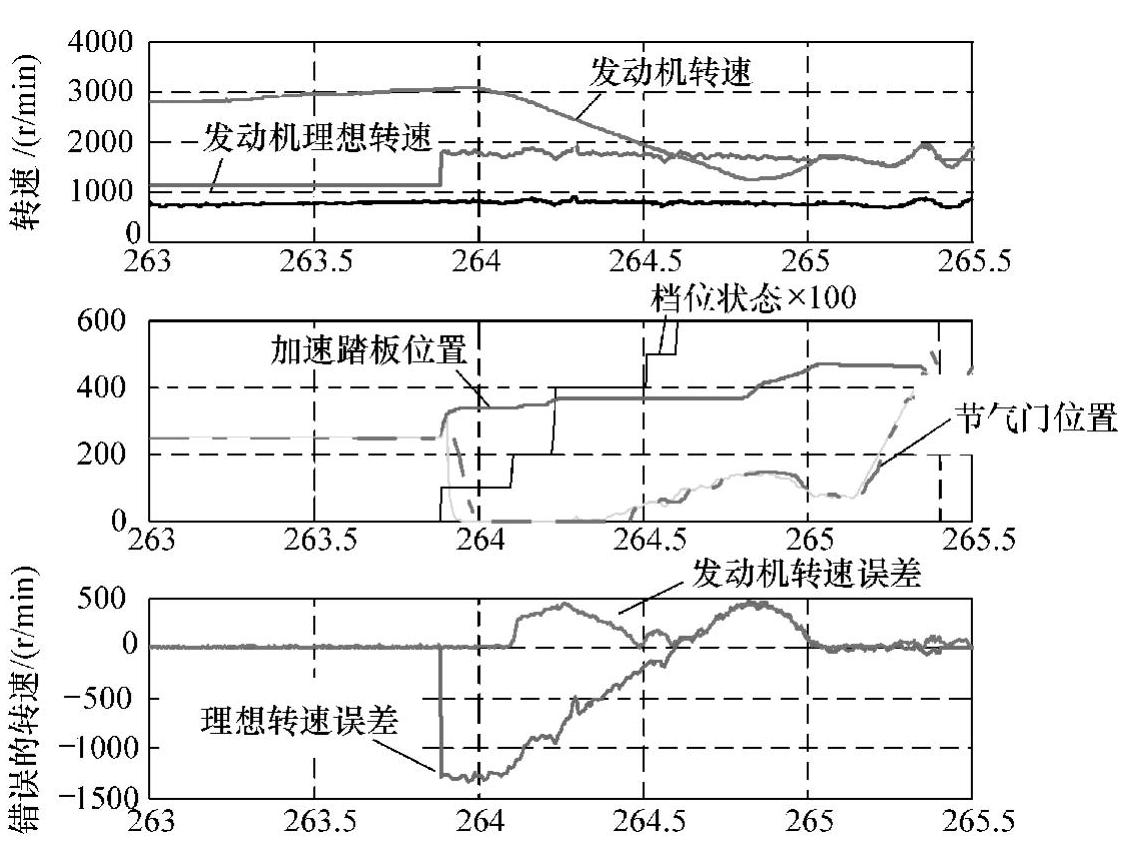
图6-5 换档时发动机转速控制实例
①发动机转速自然下降。
②当转速降到理想值时没有保持而继续下降。
③离合器和节气门共同把发动机速度再提高到理想值,这耽误了时间,而且很容易引起动力链的谐振。
④由于节气门开度下调,发动机速度下降。
⑤由于节气门开度开始跟踪踏板而线性增加并超调,发动机速度开始上升。
⑥挂档完成后,由于驾驶人抖动踩踏板,节气门开度跟随踏板振荡,发动机和车子也随之振荡。
从图6-5可以看出,虽然在t=264.5s之前,即在发动机降到理想转速之前,节气门开度增加也就是说发动机目标转矩已经上调,但是由于发动机的延时和所加幅度比较小,发动机转速的下降趋势没有得到抑制,导致发动机转速低过理想转速(接近500r/min)。如果再提前加油并加多一点,那么在t=264.6s时,发动机转速到达理想转速后就有可能保持住,接合离合器就会很平顺。那么就会减少滑摩时间,也不会引起那么严重的振荡。所以这是转矩目标给得不对。
图6-6是另一个实例。输入轴转速下降太快,转速很快低于理想值,在挂档时给输出轴造成了冲击。挂档后发动机转速下降太慢,在发动机到达理想转速后并没有保持住和输入轴转速同步而是继续下降,最后依靠离合器强行将发动机转速提起,所以造成动力链振荡。造成这个振荡的起因是在摘档(t=139.3s)时发动机转矩控制得不好,转矩下降太快拖住了发动机,导致输入轴转速猛然下降。后面的发动机转速也快速下降,并像上个例子一样一下一上进行调整。这种换档效果肯定很差。
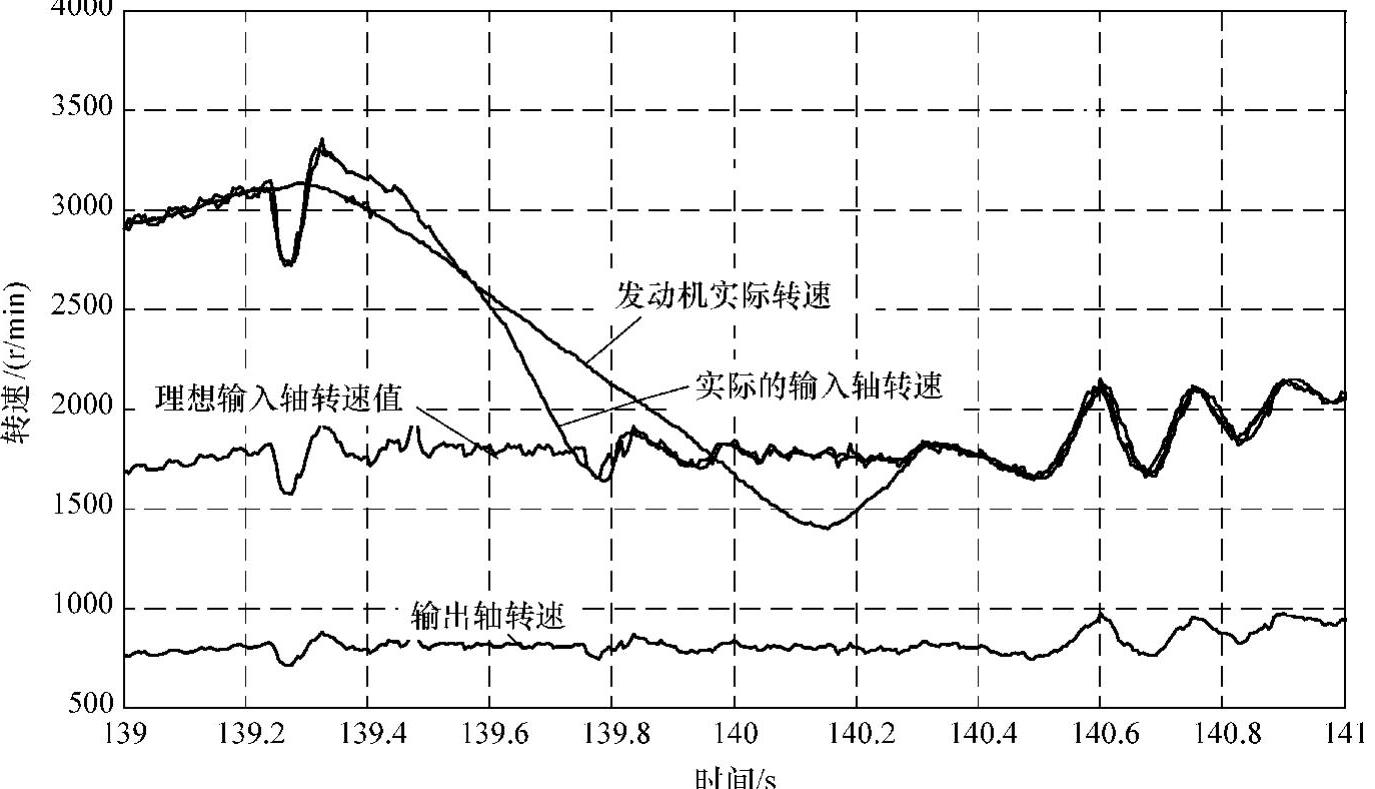
图6-6 换档时发动机转速控制造成冲击实例
图6-7记录的是2档到3档的信号图。虽然提前摘档,但关节气门的速度太慢使得发动机转速在空载下飙升。随后自然降速,发动机费了275ms的时间把速度降到飙升前的速度,耽误了和离合器同步后接合离合器的时间。当降到理想速度时,节气门打开力图保持发动机的转速和输入轴一致,但是节气门打开得还不够,发动机转速在离合器刚刚接合时由于惯性和负荷等因素依然下降,然后和节气门相互作用而振荡。
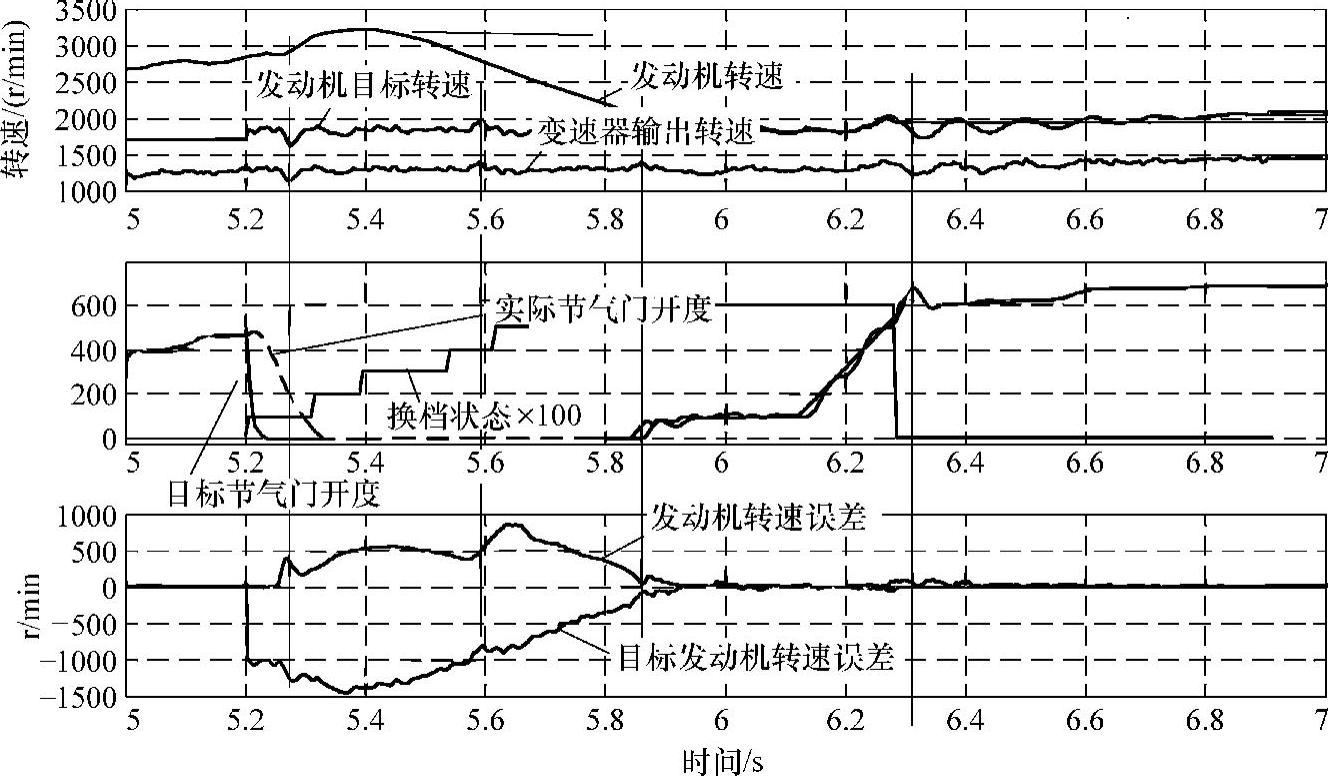
图6-7 换档时发动机转速飙升实例
换档时发动机转速有无上下振荡是衡量换档品质好坏的主要特征之一。换档后,图6-7中发动机转速的波动会造成噪声和车身晃动,油耗和排放都会增加,所以应尽量消除。
机械式节气门也是有关合弹簧的,它的静态位置不是全部关闭而是接近全部关闭。节气门靠电动机的正转(大电流打开)以克服其弹簧阻力,当电动机的驱动电流减小时,节气门开度减小。当弹簧的力不足以提供所需要的关闭速度时,电动机可以加上反向电流助力。同一个控制对象,在打开和关闭过程中,节气门弹簧起着不同的作用,这在控制和标定中要加以注意。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。