



前面讲过,换档拨叉是用来选择输出轴通过哪一对齿轮和输入轴接合和实施啮合,即挂档。选择使用哪个拨叉就是选档。选档和挂档方式有多种:有采用鼓式同时进行选档、摘档或挂档的,如格特拉克生产的双转鼓AMT系统;有采用MT原有的XY二维平面矩阵选换档机构分别进行选档和挂档的。现分别来介绍这两种方法。
(1)鼓式选换档
双转鼓系统是由两个转鼓分别控制不同的档位。它的优点是在一个鼓进行摘档,另一个鼓可以准备挂档而不需要机械选档。双鼓系统常采用奇数档鼓和偶数档鼓,如果只是升一档或降一档,那么选档是通过电子控制选择转动哪个鼓来完成,这类似于双离合器系统。但如果要一次升二档或一次降二档,则还需使用同一个鼓。
图4-10是一个单鼓四槽换档机构。它可以同时控制四个拨叉,如图4-10所示。
在鼓式换档机构中,拨叉头置于槽内,由电动机驱动换档鼓旋转。旋转式换档鼓上的斜坡滑槽通过挤拨叉头带动拨叉进行轴向移动。控制了转鼓的转角,就控制了拨叉的位置。图上看到的平槽在鼓旋转时,平槽对应的拨叉就不会运动。这样,通过滑槽的设计形状和几个滑槽的相对位置,就可以达到既能选档又能挂档的目的。单鼓机构一般在完成旋转360°的过程里要完成所有档位的摘档和挂档。当拨叉移动到指定位置时,拨叉可以继续停留在该位置上而不需要电动机的转矩维持,即具有一定的自锁功能,所以电动机此时可以断电。当然不是所有鼓都能实现自锁。
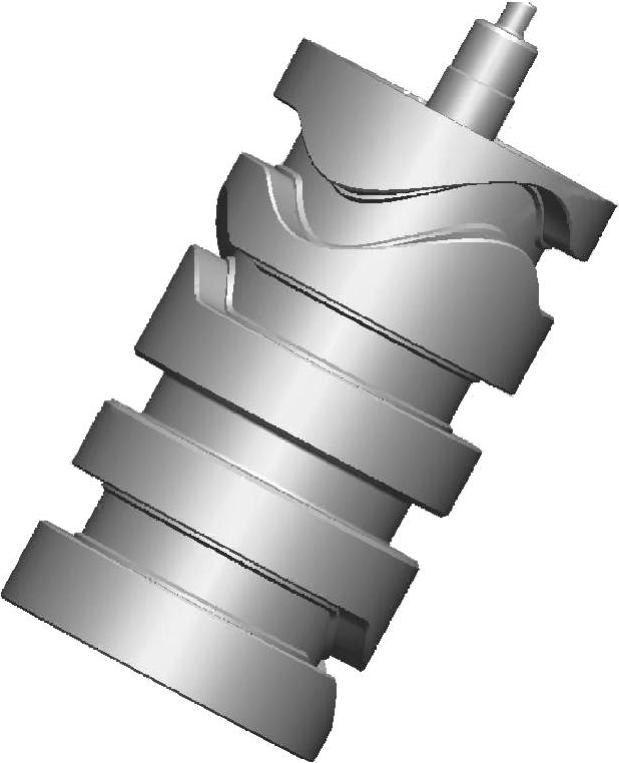
图4-10 单鼓
换档控制的子系统的输入参数有两个:当前的实际档位和目标档位。知道了目标档位,可以通过查表得知换档鼓必须处于的转角位置,然后控制挂档电动机按预定的速度轨迹逼近目的地。拨叉换档过程有摘档和挂档。摘档时通过查表得到摘档电动机要走到的位置,当电动机运行到了这个位置时,摘档应该成功,此时输入轴应该脱离输出轴,输入轴和输出轴就不一定继续同步。如不再同步,则可认为摘档成功,但是仍处于同步状态时,却不能肯定摘档没成功,因为两者分开后还有可能恰巧地运转在同一个速度。如摘档不成功就要再次摘档。如果在一个预设的最大重新摘档尝试次数后仍不成功,则可能是卡死,再试也是无益。
对于增档或减档情况,摘档成功后接着就是同步,将换档鼓转到正确的位置后等待新档位下的同步。当新的同步已经确认,则实施挂档直到转鼓转到正确的档位位置。当到达预定的位置后,输入轴和输出轴应该通过滑齿套啮合,滑齿套的转速应该一样,即完全同步。若转速完全一样,还不一定说明挂档成功。若转速不一样,则说明挂档肯定没有成功。若转鼓到达指定位置后仍未同步,即仍未挂上档,要进行补偿重挂。若补偿次数大于某预设值,则说明出现故障,应调用故障诊断程序(挂档失败时可采用退进并用的办法和检测电动机电流的办法重试摘档和挂档)。实际上,换档鼓上滑槽的连续性使得摘档和挂档之间没有间隙或等候,可一气呵成。
换档时转鼓执行机构电动机的速度可以是恒速,但为了取得更好的啮合效果,缩短换档时间,可以采用不同的速度运行。就是说,和离合器控制一样,这不仅仅是位置控制,还是过程控制。
(2)二维选换档
图4-11所示为一个二维选换档变速器执行机构接口的实际尺寸图。它有5个前进位和1个倒档。它有3个拨叉,呈左右排列。每个拨叉对应一个U形口。换档指(拨块)伸入中间的三个U形拨叉头口形成的框内运动(图4-11),选档时拨块左右运动,以选择其中一个U形拨叉。摘档、挂档时,图中拨块在做上下运动。图中拨块做左右运动时,不驱动任何东西,除了自身的运动摩擦阻力外,没有负载阻力,所以选档所需的动力很小。但在摘档和挂档时不同,摘档时拨块必须将拨叉从图4-11所示的上方或下方移动到中间,这需要克服啮合齿的分离阻力。在挂档时,拨块必须从中间向上方或下方移动,也就是说必须驱动拨叉压迫同步器,使输入齿套与输出齿套转速同步,然后使接合套接合完成换档。压迫同步器需要力,力越大,同步速度越快。
同步后,输入齿套和输出齿套的转速相等,但是挂档时同步齿套的齿顶和齿谷位置不一定刚好相对应,而有可能是齿齿相对。在齿齿相对时,就不能相互插入,那就是相位相同。当然大部分时间不是完全齿齿相对,而是两齿差一个相位。相位相差180°时,刚好齿的凹凸相间,可以啮合。在不是180°时,就需要靠拨叉施加轴向力将齿挤进去,挤成180°。挤的时候,由于输出轴的等效转动惯量很大,同步器的力量不大可能改变得了输出轴的相位。
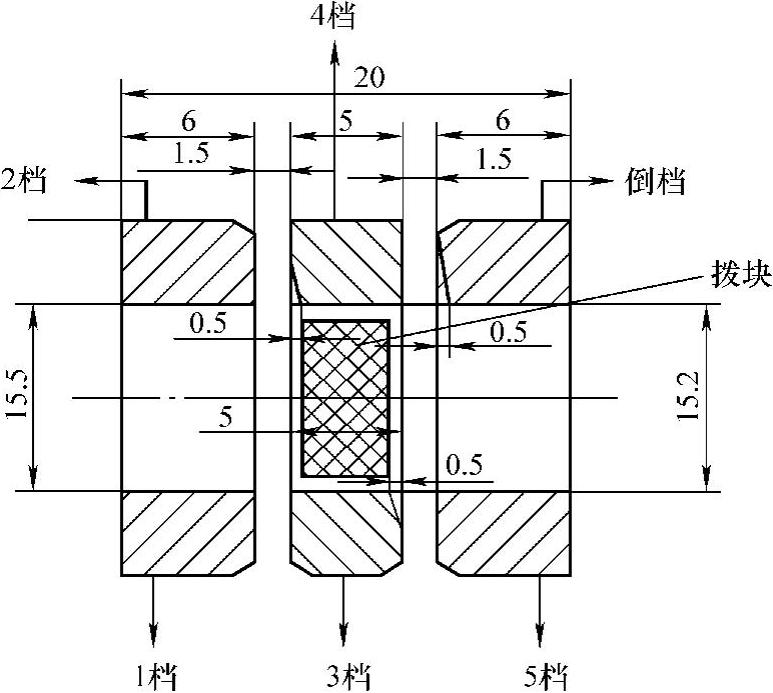
图4-11 二维选换档机构尺寸示例
因此,只能改变输入轴的相位。滑齿套挤进去所需力的大小和输入轴的等效转动惯量以及同步环的轴向摩擦力大小息息相关,也和相位差的大小有关。尤其是后者的变化会导致挂档力的变化,这给控制带来一定的难度。当然,只要不是绝对同速度,二者的相对位置即相位实际上也在变化。总之,摘档和挂档所需的力比选档所需的力大得多。
MT换档时,驾驶人使用原有手动变速器换档器的操作过程是摘档、选档和挂档。AMT也遵循同样的操作程序,区别只是由AMT自动完成。图4-12是一个电控选换档执行机构的一个示例。选档电动机使换档指上下运动
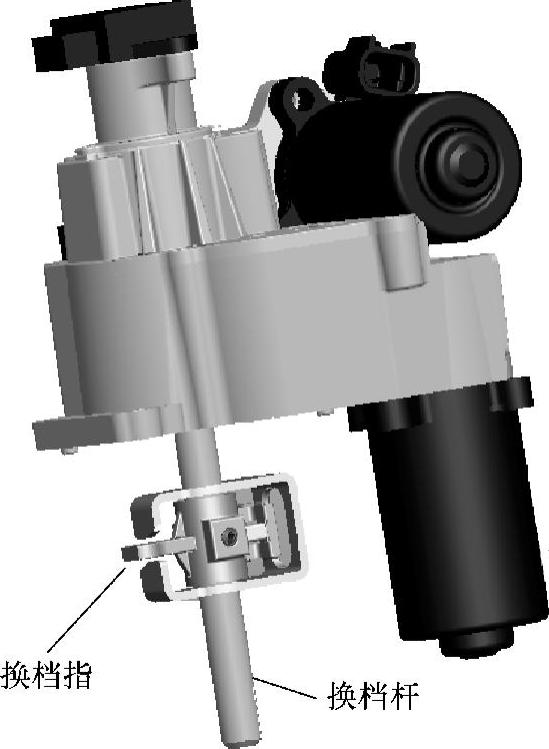
图4-12 电控选换档机构示例
选取合适的拨叉。换档电动机旋转换档杆,使它带动换档指向左或向右旋转进行摘档和挂档。
如果目标档位和现有档位在同一个拨叉,那么无需再选档。如已进入档位,当然也不用再做同步控制,直接完成挂档即可,大大节省了换档时间。
从空档挂到倒档或1档都不必有摘档过程,因为拨叉头已经在空档,直接同步和挂档。这也节省了时间。(https://www.xing528.com)
从图4-11可以看出,为了顺利选档,各拨叉必须排列整齐并且拨头必须到达合适的区域才能左右移动不受阻挡,否则不能顺利完成选档。选档必须准确地使拨块到达合适的区域以便能拨动该档的拨叉。如果拨块碰到两个拨叉,则无法挂档,因为拨叉有互锁功能,拨块无法将两个拨叉同时压进去,这是造成挂档卡死的原因之一。
为了顺利选档,对拨叉回到空档的准确度要求较高,及要求所有拨叉U形口排列整齐。如果拨块和U形拨头都没有倒角,则拨叉控制的精确度必须很高,拨块定位误差必须小于拨叉块之间的距离,否则就会使拨块不能移动而不能完成选档。一般拨块之间的距离为1.5~2.0mm。
对于挂档,从理论上讲精度要求不高,只要挂档时挂到不能再挂,即在位置上超出某一值就到位了,只要齿套不出现齿对齿的情况,一般不会出现卡死。但是实际上,机械机构多存在虚位,导致传感器显示的数据和实际位置不一致。
这里所说的虚位,是指AMT执行机构的驱动电动机在旋转,但是相应的位置传感器无变化,或位置传感器有变化,但是执行机构的末端执行件不运动。虚位影响的大小取决于虚位所在的位置。当虚位出现在电动机和位置传感器之间时,传感器不会反映虚位的大小,因为只有当传动装置克服完虚位后才作用到传感器,传感器开始有输出。当电动机反转返回时,电动机的运动也不能马上作用到传感器,而是先克服虚位再作用到传感器。典型的回型曲线如图4-13所示,表示了虚位对位移测量的影响。其中实线表示电动机正转,虚线为电动机反转时传感器输出和实际位移的关系。只要执行机构和末端执行件之间没有虚位,电动机和传感器之间的虚位就不会对控制精度造成很大影响。虽然这一类虚位对位置的控制精度没有什么影响,但是对电动机控制系统有一定的影响。在虚位区间,驱动机构实际上和负载没有连接,除了传感器前面机构本身的摩擦阻力外,电动机没有任何负载,因此电动机可以很快加速,堵转时间很短,峰值电流会大大减少,这是有利的一面,但是大的虚位会拖延动力作用到真正负载上的时间,高速运转的电动机也可能因虚位结束碰到负载而产生撞击,这方面的问题在下面还会谈到。
但是如果虚位出现在传感器和机构的执行末端之间,则传感器输出就会有变化,但执行机构的末端没有位移变化的现象。对于选换档机构来讲,其负面作用就体现在传感器的输出不能体现执行机构的真实位置。如图4-14所示,同一个传感器输出值,在电动机正转时机构末端到达的实际位置是P1点,而当电动机反转退回来到达同一个输出值时,机构末端到达的实际位置是P2点。P1点和P2点位置之差就是传感器之后位置虚位的大小。因此,当虚位较大时,就会出现选档不准、挂档位置不准、离合器位置不准的严重问题。如果知道虚位的大小,就可在目标上进行纠正;如果不知道虚位的大小或者虚位的大小是变化的(如磨损),不采用自学习的方法纠正就会控制失败。所以,传感器的安装位置要尽可能靠近执行机构的执行端。对于将传感器内置到电动机的系统来讲,它远离执行机构的执行端,因此要特别关注传动机构的虚位问题。
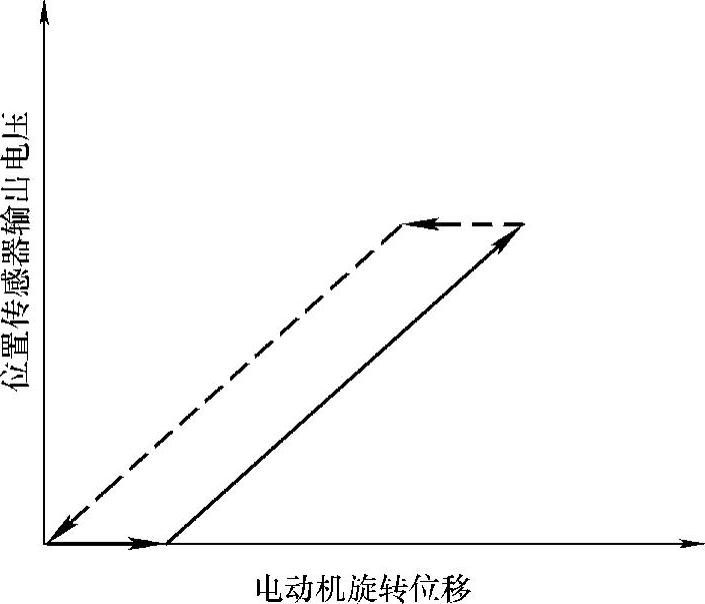
图4-13 虚位对位移测量的影响
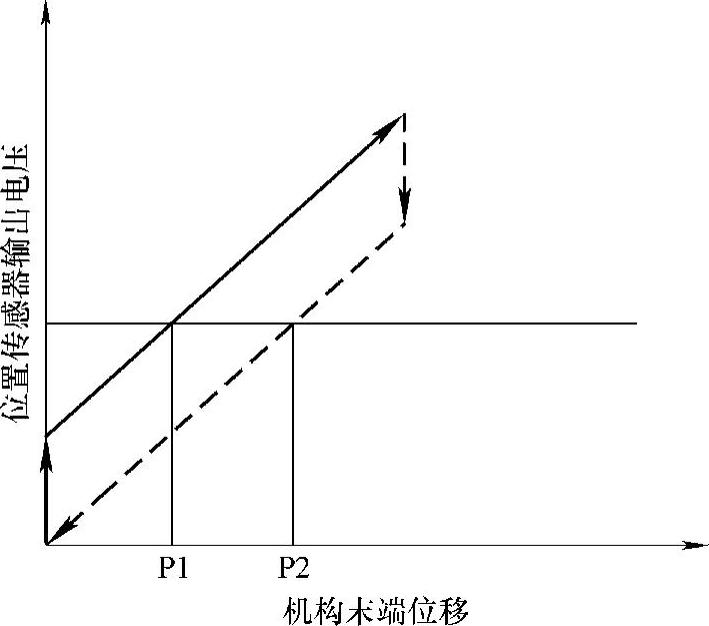
图4-14 虚位对控制的影响
无论是传感器前的虚位还是传感器之后的虚位,它们对电动机电流、动作作用时间、虚位结束时的冲击、控制精度等都会产生影响。AMT系统中的虚位由如下几个方面组成。
拨叉虚位:拨叉都有一定的虚位,即在不挂档的情况下,拨叉可以在一定范围内产生轴向自由移动。拨叉虽然是水平放置,静态时在电动机不驱动的情况下是不应该动的,但在行驶过程中的振动可能会使拨叉自由偏移。拨叉偏移过大就可能造成选档受阻。
AMT机械传动机构虚位:拨头通常是由花键和电动机带动的齿轮等连接,花键会有虚位,传动齿轮的齿之间也会有虚位,这些虚位是叠加起来的。当磨损增加时,其虚位还会增加。如果传感器是和电动机输出轴连接,大的虚位就会造成传感器有输出但拨头实际没有动的局面。
传感器虚位:这种虚位通常出现在电位器式的转角传感器中。当运动方向改变时,电位器输出在一定范围内不改变输出。这样,当电位器输出同一值时,并不意味物理位置是一致的。当执行机构到达同一位置时,电位器的输出值并不一定一致。当磨损增加时,其虚位还会增加。这就会出现传感器显示拨叉到达同一位置,但一种情况可以选档,另一种情况就可能不能选档,这说明虚位导致拨头实际位置可能不一致。
因此,考虑到虚位,执行机构的驱动端、输出执行端、传感器输入端三者之间的关系不一定是固定的,也许三者都不同。如果传感器紧接在电动机轴上并且没有虚位,则传感器显示的是电动机的运动;如果传感器紧接在执行端并且没有虚位,则传感器显示的是执行端的运动,这正是我们所需要的;如果传感器安装在执行端并且有虚位,则传感器的输出将滞后于实际运动轨迹;如果传感器安装在电动机轴上但没有虚位,而机械机构有虚位,则传感器的输出将超前于执行端的实际运动轨迹。
重力:如果选档拨块是上下运动的,拨块及其机构的重力会使拨块自然下坠,所以在选到档位后,如果停止选档电动机后执行挂档,那么可能会使拨块在电动机断电后自由下滑而偏离合适区域,进而阻碍挂档。
综上所述,考虑到虚位,AMT系统对挂档定位有较高的控制精度要求。当然控制精度越高越好,但会受到实际条件的制约,如虚位、测量精度、控制时间等限制。所以要了解精度多高为足够好,就是精度的最低要求是什么。
测量精度:如果使用的MCU是10位的A/D转换器,则忽略噪声后,其测量精度只能是±1/1024。当使用12位的A/D转换器时,则忽略噪声后,其测量精度可达到±1/4096。测量精度提高了4倍。当然如果噪声比较大,那么高精度的A/D转换器也提高不了测量精度。控制精度不可能高于测量精度。所以降低信号噪声、提高A/D转换器的位数都是提高控制精度的重要方法。
另外,测量精度和传感器的测量范围有关,最大限度地利用传感器的测量范围也能提高测量精度。如一个86°的转角传感器,如果只使用其中的40°来测量一个20mm的位移,那么传感器的输出只在不到幅值一半的范围内变化。如能调整使用80°来测量20mm,那么测量的分辨率可提高1倍。人们常认为加一个电子放大器可以达到相同的精度效果,但是接触式传感器的输出信号变化不是理想的连续信号变化,放大后也不好,况且增加一个放大器,又增加了控制器的成本。
选档控制精度:改变选档允许误差标定值可以改变选档控制精度。各个系统根据具体情况确定其允许误差值。由于永磁式直流电动机的惯性和内部电磁铁的影响,当电动机旋转圈数较多时,其允许误差值可能做得比较宽松些。在电动机断电时,当系统阻力小于电磁力时,电动机会受电磁铁的影响而朝某几个固定位置转动,也就是说,电动机在断电后可能会自动改变位置而影响控制精度。
拨叉复位到空档时必须准确。这除了前面所提到的利于选档外,还要考虑的是避免使没有啮合的档位的拨叉接触到同步器,否则拨叉和同步器之间的运动会造成拨叉磨损。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。