



随着车辆自动控制功能的不断扩展,自动控制系统在车辆中的应用越来越广泛。为了共享资源,互通情报,各控制器之间可以通过通信来实现信息交流。现有很多种通信总线,如RS232、LIN、K线(KW2000)、MOST、FlaxRay、I2C、CAN等。CAN总线是目前在车辆各控制器之间实现通信的最普遍使用的一种方式,许多信息可以在CAN总线上获得,无须再由各控制器自行安装传感器采集信号。CAN总线的应用简化了系统,简化了线束,降低了造价,减轻了重量。当然,共享资源也产生了系统之间的相互依赖问题。一个传感器或CAN通信出了故障,会导致使用这个传感器信号的所有子系统都不能正常工作,造成系统瘫痪。当然这个问题可以通过使用附加传感器和多路CAN总线来解决。图2-8为一个实用系统中的CAN总线网络的示意图。
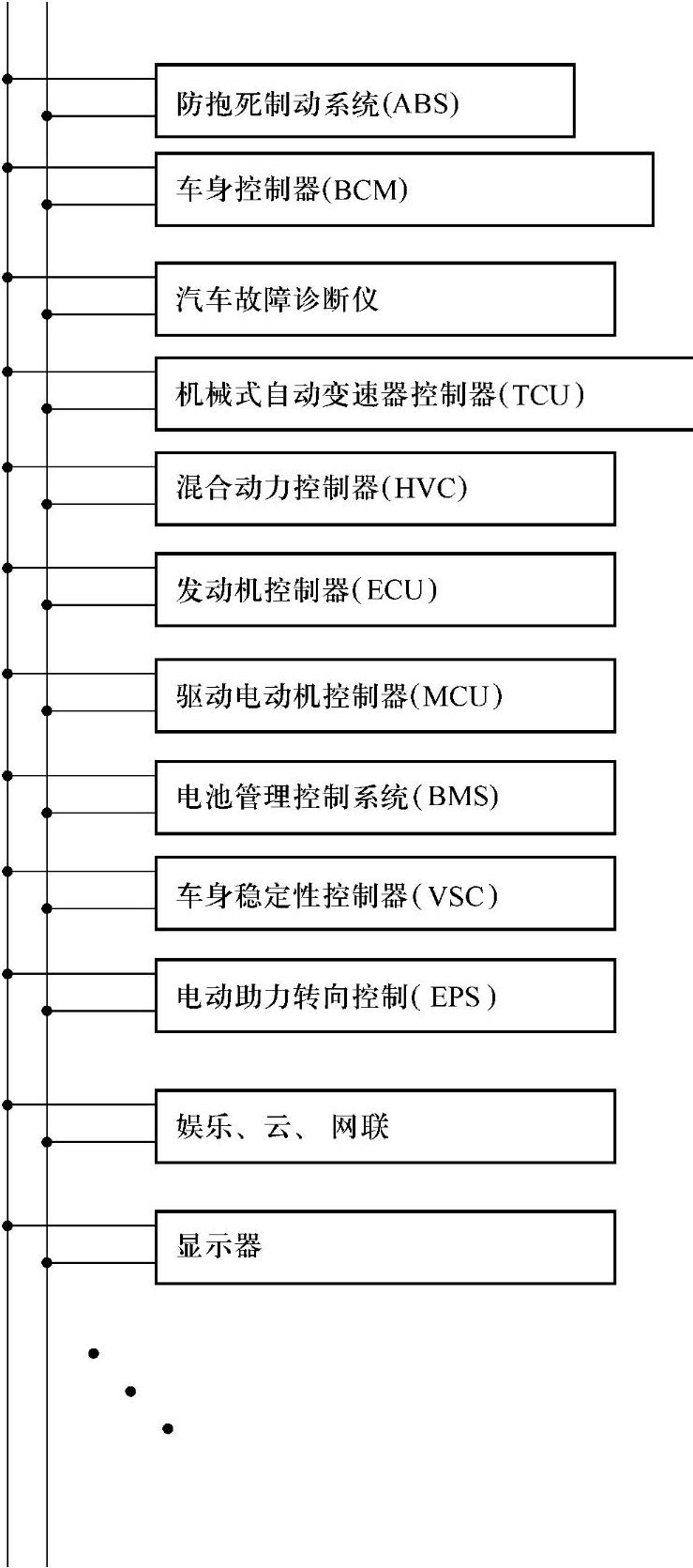
图2-8 CAN总线节点
CAN总线也有多种通信协议,如目前商务用车大多使用SAEJ1939小车用CAN20BISO11898较多。CAN还有标准格式和扩展格式之分,还可根据需要设置不同的速率。速率越高,单位时间里能传递的数据量也越大,但受干扰的影响也越大。车上通常使用的速率为:250~1000kbit/s。各系统对CAN信号可以有不同的定义,如格式、速率、数据等,所以事先必须定义好通信协议,从而使在线的各个控制器都能有效交流。在同一个系统中但对于不同的CAN通道,可以有不同定义。
TCU可向ECU请求的信号内容包括:发动机转速、节气门开度、加速踏板位置、制动开关状态、ECU故障、发动机输出转矩等。这些信号大多每10ms更新一次。
TCU还可向ECU请求一些变化较慢的信号,如气温、发动机冷却液温度、路面坡度、转向角度、实时故障码等。这些信号可以用较低速度更新。
TCU不仅可以请求ECU发数据,还可以向ECU发送操作指令,如发动机目标转速、发动机目标转矩等。这对AMT换档控制十分重要。
对于电动车或混合动力车,TCU不仅可以请求电动机控制器(MCU)发送数据,还可以向MCU发送操作指令,如电动机目标转速、电动机目标转矩等。(https://www.xing528.com)
对于电动车或混合动力车,TCU也可以请求BMS发数据,如SOC、SOP、SOH、故障码等。
TCU还可要求ABS或VSC发送车速、转向角度、路面坡度、制动状态、故障码等信号。
TCU也可以向整个网络广播换档状态、目前档位、目标档位、实时故障码等。
TCU也可以接受在CAN总线上的其他控制器的操作请求,如目标档位、发送数据、清除故障码等。
由于CAN总线通信速率的限制,当信息量很大导致一路信号的流量不能满足要求时,或必须有不同的速率时,就必须使用多于一路的CAN总线了。
CAN总线是有很多优点,但要确定CAN总线上的信号是否正常,也就是说发送方应明确指示发出的信号是否可以使用。当发送方表明某信号有故障,TCU就不能用这个病态信号,而要进入故障处理模式,如使用备用信号、启用跛行回家模式或停车。当CAN总线不工作而导致通信中断时,TCU不能继续使用原有信号,而要进入上述的故障处理模式,否则后果不堪设想。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。