



无论输入信号是模拟信号、开关信号还是载波信号,滤波都是必不可少的。滤波有两种:硬件滤波和软件滤波。硬件滤波是应用电子元器件,通过有源或无源滤波器对输入信号进行滤波。在AMT控制系统中,所有模数转换输入信号在接入MCU之前通常都采用无源低通滤波器进行滤波。硬件滤波器的截止频率应该在TCU采样频率的一半以下,以确保软件滤波时不会造成信号变形。软件滤波可采用更多方式,低通、高通、带通、带锁等滤波,并可以通过不同方式实现,如FIR滤波器、IIR滤波器等。但是由于是实时滤波,计算量和数据存储量都受到系统资源的制约。FIR滤波器稳定性好,但数据存储量大,且延时时间较长;IIR滤波器稳定性差,但数据存储量小,且延时时间较短。低通数字滤波器的截止频率应略高于所滤波信号中有用信号的最高频率,这样才不会过滤掉有用信息。
对于开关信号和脉冲信号,TCU也会采用硬件滤波以去掉电信号中可能出现的尖毛刺。但对于按键时开关本身的机械跳动、信号上升沿和下降沿可能的振荡或电噪声引起的抖动较大的信号,硬件滤波器就不一定能过滤掉,所以用软件去除开关信号和脉冲信号的抖动是必不可少的。电信号噪声的抖动频率通常较高,机械抖动的频率通常较低,这可以通过硬件和软件分别进行滤波。一般由硬件重点处理高频抖动,由软件处理低频抖动。
图2-4是实测的某输出轴转速脉冲信号转换成物理量信号后的频谱曲线。
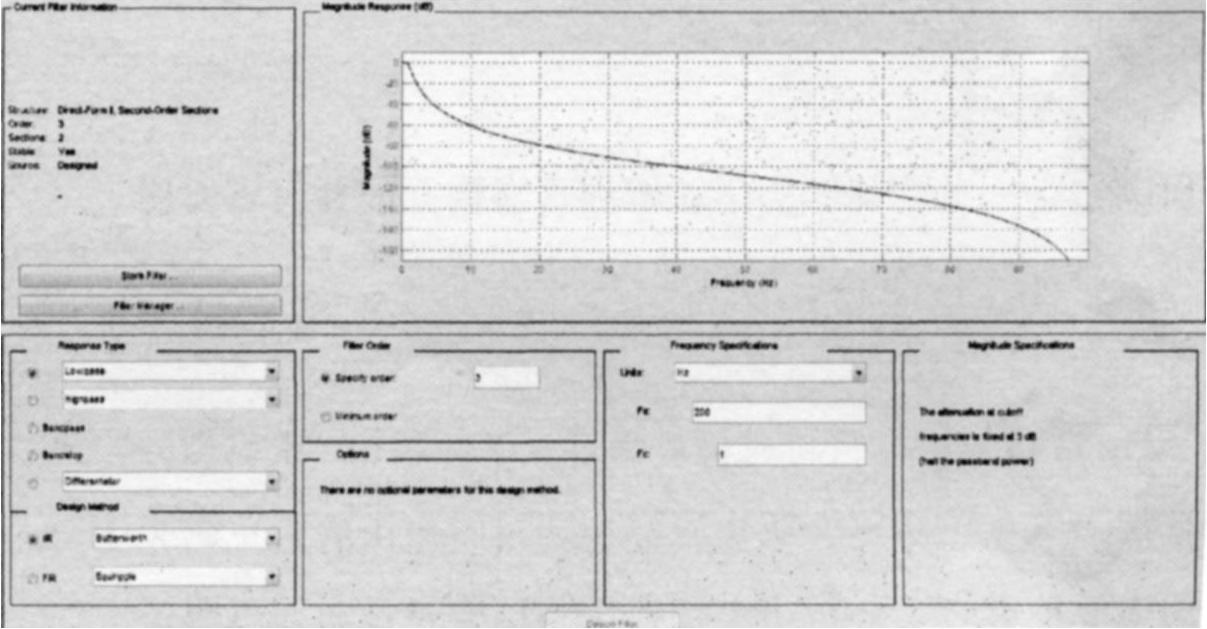
借助Matlab的滤波器设计分析工具——fdatool可以很快地设计不同类型的软件滤波器,图2-5所示为一个简单的3阶、截止频率为1Hz的IIR低通滤波器的一些参数。从频谱特性可以看出它的现实特性与理想特性相差较大,设计者需根据需要改变参数。
输出参数和模型如下:

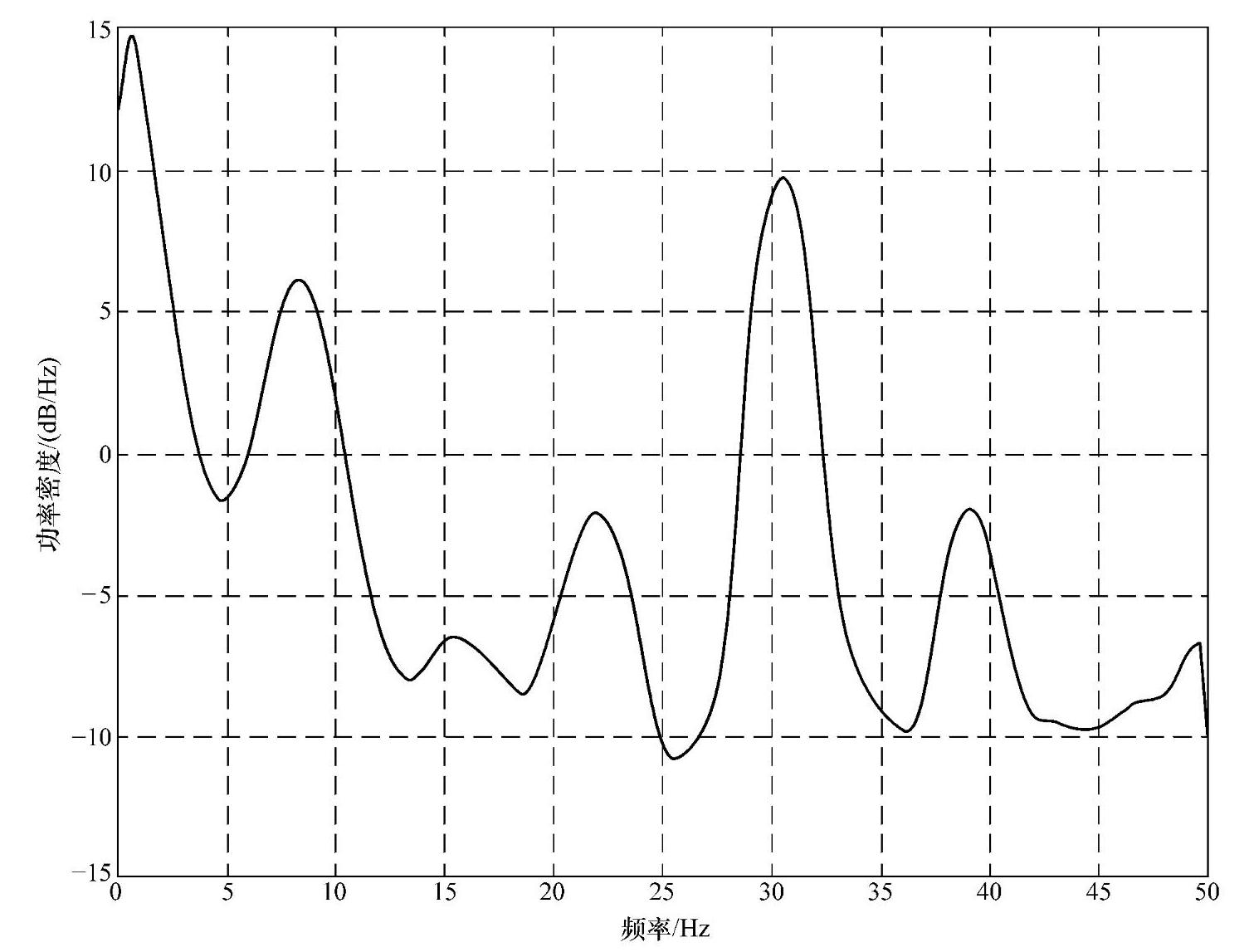
图2-4 输出轴转速信号频谱曲线
 (https://www.xing528.com)
(https://www.xing528.com)
图2-5 低通滤波器设计
将其转换成数字控制模型形式,如图2-6所示。
使用不同的滤波器对同一个输入信号进行滤波,检查滤波后的信号就会发现哪个滤波器比较理想。当然,最好的办法还是使用频谱分析仪观察不需要的噪声是否全部滤掉,需要的信号是否有丢失或变形。图2-7是用4个截止频率递减的低通滤波器对发动机转速进行滤波后的信号。图2-7a、b、c所示的几个信号采用的截止频率较图2-7d高,图2-7d所示的信号是经过截止频率为1Hz的低通滤波器滤波后的曲线。从图可以看出,使用1Hz低通滤波器的输出信号虽不是很理想,但比另外几个滤波效果好,基本上可以满足一般要求。最好将滤波器的截止频率再降低一些,并将过渡过程的增益再降低一些,当然这意味着要提高滤波器的阶数,也就是说滤波器的结构要更复杂一些。
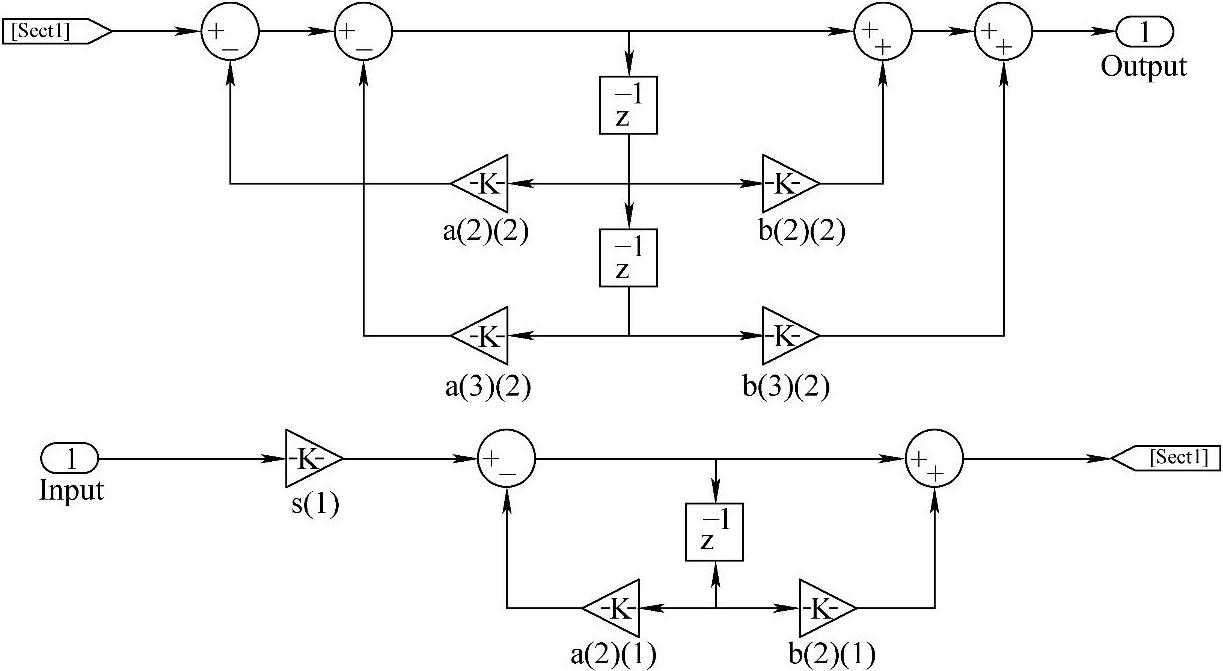
图2-6 低通滤波器数字模型之一
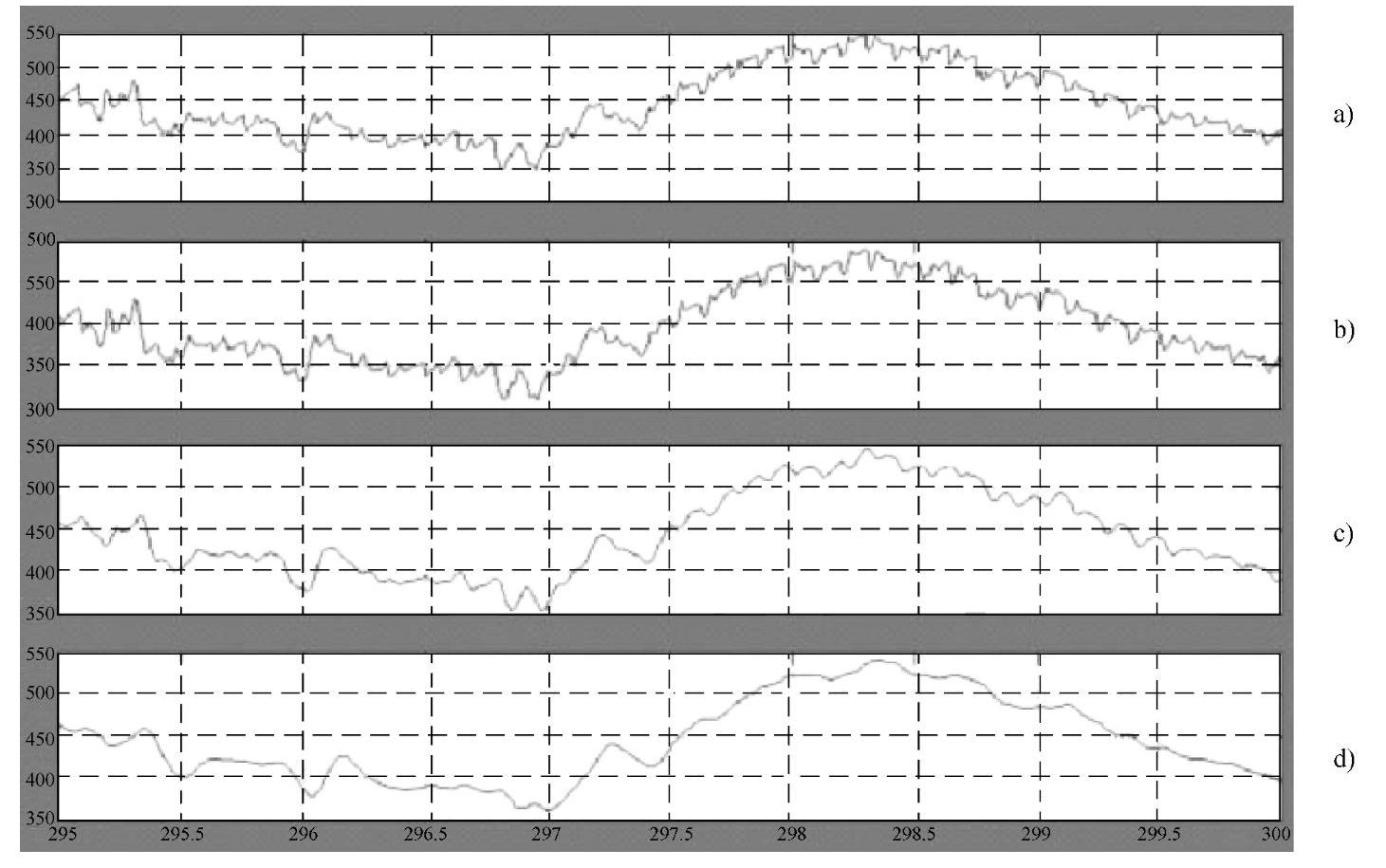
图2-7 不同滤波器的输出轴转速信号对比
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。