



TCU的主芯片(MCU)一般都有多路模数转换(A/D)通道。现常用的模数转换精度有10位的,有12位的,也有更多位的。所有A/D转换后的信号都要经过滤波和变成相应物理量后进行存储以供主程序使用。有些系统由于采用定点运算,为提高运行速度,有些地方就直接使用A/D转换后的数字值而没有物理单位。在本书后续的章节中也常以“AD”来表示从MCU寄存器中直接读取的模数转换值。这些值和所测量的物理量有固定的对应关系。AMT中常用的主要模拟信号如下所述。
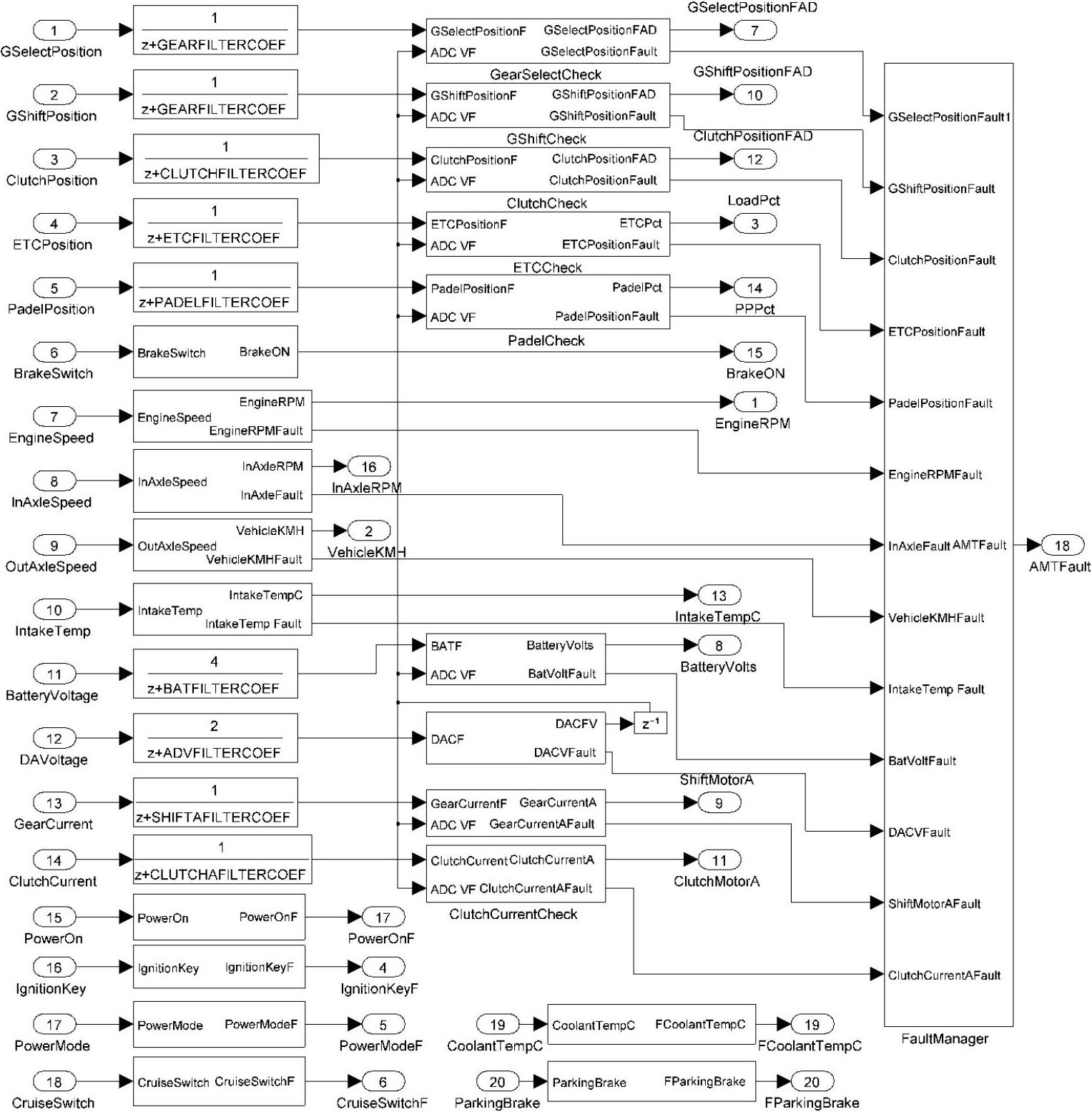
图2-1 信息中心框图
(1)选档、挂档位置传感器输出信号
手动变速器通常有多个拨叉,每个拨叉可用于1~2个档位。如一个5前进档加1个倒档的变速器有3个拨叉。如果3个拨叉都在中间位置,那么变速器就处于空档。因此,在换档过程中要做两次选择。首先是选用哪个拨叉,即将换档指移向该拨叉位置,但是选好了拨叉并没有挂上任何档位,变速器仍然处于空档,通常这个过程被称为选档。在选好了哪个拨叉后,再选择挂上这个拨叉所能接通的两个档中的一个、挂上档后就意味着换档成功了,变速器不再是空档了,这个过程通常被称为换档,实际上就是挂档。
当变速器采用二维矩阵式换档时,有一种方式是采用鼓式滑槽使拨头同时在X、Y两个方向上移动来实现选档和挂档。这种方式只需要一个动力源,也只需要一个位置传感器。另一种方式是用一个机构专门执行选档,另一个机构专门执行摘档和挂档,这通常需要两个执行机构,也就是说要两个动力源,相应也通常需要两个位置传感器。这两个传感器用于检测所测机构的即时位置,即选档位置和挂档位置。
这种模拟量的位置或转角传感器有接触式和非接触式两种。接触式位置传感器通常是电位器式传感器,输出的电压信号常为0~5V。非接触式位置传感器通常使用线性霍尔器件,输出的电压信号也通常为0~5V。驱动电动机在改变机构位置的同时也改变传感器的滑臂位置或转角,从而改变它的输出电压值。对于不同系统、不同传感器,可能会有不同的参数值,具体数据通过标定确定。由于传感器和安装位置有一定的离散性,须通过自学习来校准和纠正这些位置。
接触式位置传感器有磨损失效问题,而非接触式传感器可能会有抗干扰能力差的问题。
有些系统采用电动机旋转角度编码器输出脉冲信号。这个问题将在2.2节再详细说明。
(2)离合器位置传感器输出信号
与选档和挂档位置传感器一样,离合器位置传感器也可以是一个模拟量输出,即0~5V的电压信号。离合机构驱动电动机在改变离合器位置的同时改变传感器的滑臂位置或转角,从而改变它的输出电压值。也就是说,不同的电压输出值对应于离合器的不同开度。对于不同系统、不同传感器,可能会有不同的参数值,具体数据通过标定确定。这个值可能会随着时间的推移或离合器摩擦片(即从动盘摩擦片)的磨损而变化,因而需要自学习。
(3)电子节气门拉索机构位置传感器输出信号
对于没有电子节气门的系统,还要加装一个电子节气门拉索机构。与选档和挂档位置传感器一样,电子节气门拉索机构的位置传感器可以是一个模拟量,即0~5V的电压输出信号。节气门拉索电动机卷动拉索改变机械式节气门的开度,在卷动拉索的同时改变该传感器的转角,从而改变传感器的输出电压。对于不同系统、不同传感器,可能会有不同的参数值,具体数据通过标定来确定。节气门的失电状态、全关闭ADmin和全打开ADmax的值可能会随着时间的推移而变化,因而也需要自学习。
为了系统的安全,建议用户采用有两个位置传感器输出通道的ECT。
如果传感器输出0~5V的电压,对应10位精度的AD转换器,则可将该电压值转换为0~1023的数字值,将对应的电子节气门转角转化为开度百分比:(AD-ADmin)/(ADmax-ADmin)×100%。节气门的开度在0~100%变化。
有两路节气门位置信号输出的系统,其输出信号变化方向相反。当节气门被逐渐打开时,一路输出信号逐渐变大,另一路输出信号逐渐变小。这个信号可能是电压,也有可能是频率。同时输出两路信号有利于故障检测。对于有电子节气门和有CAN通信的系统来说,发动机控制器(ECU)可以通过CAN总线直接向TCU提供节气门开度信号。
(4)加速踏板位置传感器输出信号
和档位位置传感器一样,加速踏板位置传感器也可以是从接触式或非接触式传感器输出的0~5V的电压信号。在驾驶人改变加速踏板位置的同时自动改变了传感器的转角或相对位置,从而改变它的输出电压值。对于不同系统、不同传感器,可能会有不同的参数值,具体数据通过标定确定。踏板自由位置的值可能会随着时间的推移而变化,因而需要自学习。通常踏板踩得越深,输出电压越高。例如:当预置的踏板自由位置值比实际值小时,踏板在自由状态就会被控制器误以为驾驶人已踩加速踏板,这是不能接受的。如设置的踏板自由位置的值比实际值大,那么驾驶人在轻踩加速踏板时就不会起作用,即有一个死区。有轻微死区是可以接受的,在自学习时必须注意。
为了系统的安全,建议用户采用具有两个位置传感器输出通道的电子加速踏板。和节气门位置信号一样,它有两路加速踏板信号输出的系统,其输出变化方向相反。当驾驶人逐渐踩下加速踏板时,一路信号的电压幅度逐渐变大,另一路信号的电压幅度逐渐变小。这有利于故障检测。只要没有故障,用哪路信号都可以。
对于有CAN通信的系统来说,ECU可以通过CAN总线向TCU提供加速踏板位置的信号。(https://www.xing528.com)
(5)选档电动机、挂档电动机、离合电动机、节气门拉索电动机电流信号
这些可以是从驱动电动机H桥驱动芯片输出与输入电流大小成正比的电压信号,或是串联在电动机电路上的电阻的压降值。因为执行机构上有刷电动机和无刷电动机的调速几乎都是通过调节PWM的占空比来实现的,所以电动机电流不一定是恒定的直流,而是脉动或间断的电流。脉动的大小和电动机回路中电感、电阻的大小以及占空比的大小有关。因此,对电流信号进行有效的硬件滤波和软件滤波十分重要。
采样电压(V)=电流增益×电动机电流(A)
因此,从A/D转换器读出的电动机电流信号要经过增益转换才能变成物理量A。增益值的大小通过标定实现。
(6)换档器输入电位信号
换档器有很多种,有的换档器是输出模拟量来表述操纵柄的位置,有的是直接输出位置开关值,有的是通过数字通信传递信息。对于使用模拟量的换档器,它的档位信号一般是从换档器模块送出来的0~5V模拟量信号。不同的电压代表换档器手柄处于不同的位置,表2-1所示为一个例子。
表2-1 不同电压代表的换档器手柄位置

考虑到噪声,应该允许各档位对应的电压值在一定的范围内变化。中间值和变化范围的大小可通过标定确定。如果标定允许误差为0.05V,则电压为0.95~1.05V时应被理解为倒档。在所有档位范围之外的电压情况应被认为是故障。
(7)电池电压、电源电压信号
对用于驱动AMT执行机构的电池电压的测量比较直接,硬件上应该能保证被测量电压的范围值。
(8)温度信号
和AMT控制有关的温度信号比较多,如外界气温、发动机冷却液温度、变速器润滑油温度等。ECU通常有较多的温度信号并可通过CAN总线直接发送给TCU。
(9)压力信号
对于气动系统,气源压力的大小对控制系统有较大影响。制动系统的制动压力信号对TCU控制也很有帮助。
(10)路面坡度信号
路面坡度信号对AMT车辆的起步控制和上下坡理想档位的确定都很重要。(11)制动信号
部分制动信号是开关量信号,但也有些制动信号使用模拟量传感器,以指示不同的制动力度。部分车辆同时具有制动开关信号和模拟信号。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。