



从图1-8可以看出,一个简单的AMT系统中负责控制的TCU除了要对AMT系统的所有执行机构进行控制,如选换档执行机构、离合执行机构等,还要对车辆上和AMT有关的其他系统进行控制。这些控制的方法就是本书专门要介绍的。
抽象地讲,一个控制系统就是对该系统的某个输出量能按需要进行调节的一个系统,即这个系统至少有一个输入,即目标,也至少有一个输出,即结果。如何去控制这个输出快速准确地实现这目标就是控制器的任务。控制可简单地分为开环控制和闭环控制两大类。所谓开环控制,就是对输出不进行实时检测确认和调节的简单控制。比如射箭,射箭手在瞄准放箭之后就不再能控制箭的速度和方向,只能任其飞行,最后到达某位置。该位置可能是原先瞄准的点,可能不是。这就是开环控制,可想而知,要命中目标就很不容易。至于闭环控制,就是实时检测确认和调节的相对复杂控制。例如卫星在发射之后,会实时根据原先确定的目标,找出误差,不断调整它的飞行姿态,如图1-9所示。控制器对卫星的飞行位置和状态不断进行检测并和原设定目标进行比较而得到误差,这个误差信息被当作调整控制卫星飞行姿态的变量,使卫星不断逼近目标设置的值。这样输出和输入形成了一个闭合的环。
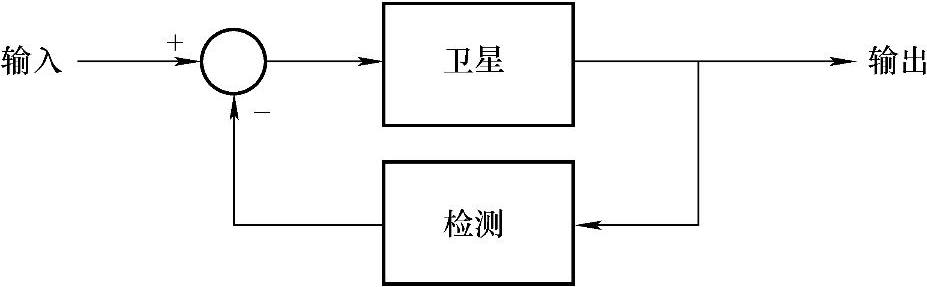
图1-9 闭环系统框图
控制系统的需求大大推动了控制技术的发展。控制理论在近代发展非常迅速。由原来的时域分析到频域分析又到状态空间分析,从模拟到数字,从古典控制理论到现代控制理论又到智能控制理论,从单点控制到互联网+。科学的发展远快于教科书的印刷速度,对于控制技术的新发展请读者自找资料学习。这里只简单介绍历史悠久而且使用得比较多的比例积分微分(PID)调节器。对于有控制背景的工程人员,请跳过下面部分直接到下一章。
PID调节器的作用就是改变原有系统一些特性使其反应稳定、快速。具体做法是对误差进行比例积分微分运算来改变控制量,即
误差Δy1=u1-y1(https://www.xing528.com)
式中,u1是输入的目标值;y1是输出的实际值。
为了使误差Δy1尽可能缩小,就要改变原来的输入量,新的输入量大小为

式中,P为增益系数;I为积分增益系数;D为微分增益系数。
PID中这三个系数有不同的作用。PID的比例部分——P用来成比例消除误差。从理论上讲,当P为无穷大时,误差就会趋于零。可惜的是在很多系统中,P稍大一些,就会出现输出超调,甚至导致系统不稳定。PID中的积分部分——I是用来消除静态误差。PID中的微分部分——D是用来帮助快速消除瞬间误差和抑制振荡。所以PID是同时共同调节输入量,即控制量。控制量是比例、积分和微分之和。每个部分的大小可以通过改变增益的大小来实现。如果将D设为零,那么实际上PID调节器就变成了PI调节器。关于PID的进一步有关理论请参考有关专业文献。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。