



作为支撑本方案的基本技术,本节将简要介绍多层感知分类器。
多层感知器(MLP)网络是一种目前流行的、基于大脑关联功能和分类模式的神经网络。每个神经元的作用很像大网络中的节点,负责处理和传输信息。神经元之间的链接被赋予一定的优先级(或权重),具体取决于它们定义的路径和与它们相邻的神经元,这意味着某些神经元被定义(基于情况,或通过训练)通过一个特定路线传送和接收信号。因此在神经网络中,神经元通过适当的互联以实现“智能”任务,如模式分类、聚类/分类、函数逼近、预测、优化、内容可寻址存储器[7]等。
顾名思义,MLP网络由多个层构成,包括输入层、隐蔽层(一个或多个子层)和输出层,如图9-2所示。它通常用于模式分类,发现任意复杂的决策边界和表示布尔函数[8]。这种设计的成功之处在于其逼近任何所需功能的效率,以及在给予足够的神经元和层的情况下能够达到很高的精确性。一个输入层神经元的数目是由输入数据的空间维数决定的,而隐藏层所包含的子层数目和每个子层中神经元的数目则取决于分类的复杂性。一般说来,隐藏层拥有的子层和神经元越多,分类的结果就越准确。但是,随着神经元数量的增加,训练网络所需要的时间也随之增加。因此在大多数情况下,需要一个折中方案。出于分类的目的,输出层的神经元的数目等于需要分类的数目,并且每个神经元代表一个类。作为一个MLP分类器,它有两个阶段:分类阶段和训练阶段。
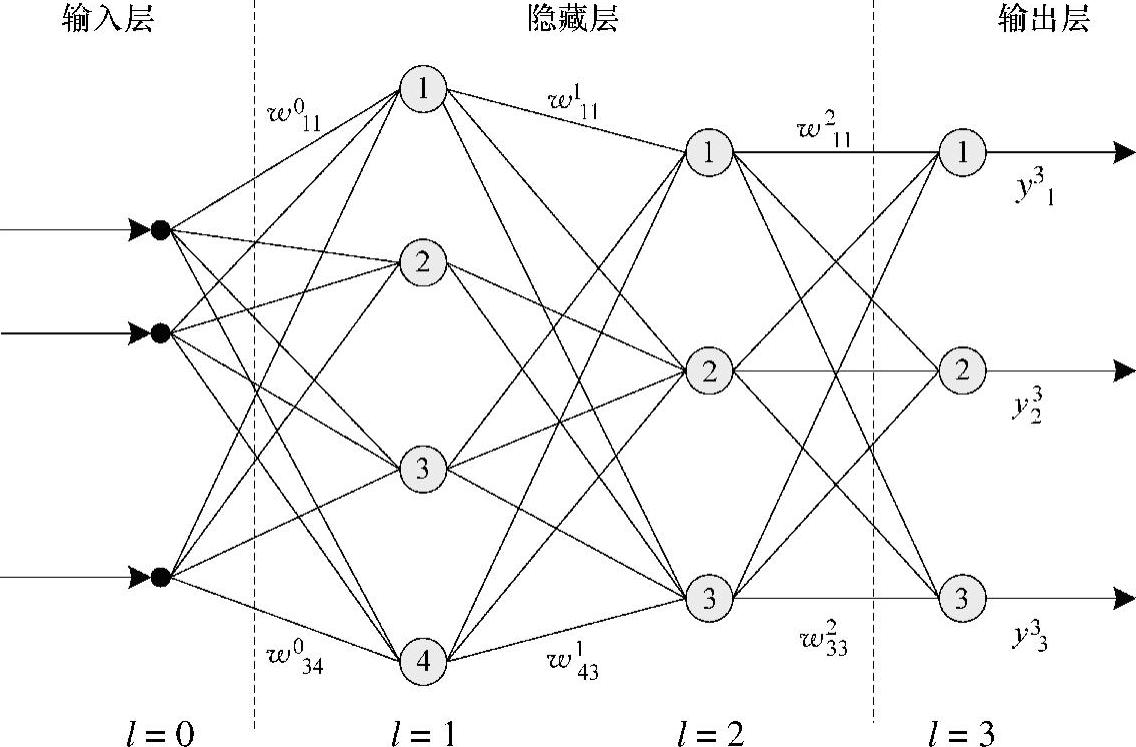
图9-2 三层感知器网络
在分类阶段,从输入层到输出层,每个神经元汇总所有来自于前面中间邻居层神经元的数据。求和之前,每个数据集乘以一个权重,该权重是经由训练过程得到的。在输出层拥有最大求和值的神经元表明了输入数据所属的神经元(类)。
L代表层的数量,输入层l等于0(图9-2),与输入层l相邻的下一层等于1,以此类推。wlij表示l层第i单元与l+1层第j单元连接的权重。此外,yli表示层l第i单元的输出;g(.)表示一个活动的功能,如sigmoid功能;xi表示一个输入矢量的第i个元素。因此,分类算法可描述如下:
1)输入层计算 。
。
2)隐藏或输出层计算 ,其中l=1,2,…,L-1。
,其中l=1,2,…,L-1。
3)返回i如argmaxi{yLi-1}。(https://www.xing528.com)
在训练阶段,其目标是为每个链接找到一个合适的权重,寻找过程是基于大量的训练样本和所期望的相应输出,从而使这些权重可以正确地分类结果。与分类阶段相比,训练阶段要相对复杂。典型的训练算法是反向传播算法[10],计算网络的错误的梯度。通过学习过程,错误从输出层到输入层向后传播,并对网络权重进行修改,以便最小化下次发生错误的可能性。一般情况下,反向传播算法的步骤如下[7]:
1)初始化权重wlij至小的随机值。
2)随机选择一个输入模式Xu,并通过网络向前传播信号。
3)在输出层计算 。其中,hLi表示提供给第L层第i单元的净输入;dui表示Xu期望的输出;g′(.)是函数g(.)的派生函数。
。其中,hLi表示提供给第L层第i单元的净输入;dui表示Xu期望的输出;g′(.)是函数g(.)的派生函数。
4)通过向后传播错误为前面的层计算δ:

5)使用Δ 更新
更新 。
。
6)转到第2)步,并为下一个模式重复执行各步,直到输出层中的错误低于阈值或达到迭代的最大数目。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。