



角速度传感器是将汽车转弯时车身旋转角速度转换为相应的电信号,在汽车行驶稳定系统中,角速度传感器提供的信号是ECU实施汽车行驶稳定性控制的重要依据。
1.振动型角速度传感器
振动型角速度传感器的工作原理如图10-77所示。在作为振子的四方体的相邻两面上,粘贴有兼驱动和检测作用的压电元件,当对压电元件施加交流电压时,就会在负压电效应的作用下,使振子振动。当振动着的振子又旋转时,就会产生一个与旋转速度相对应的哥氏力。
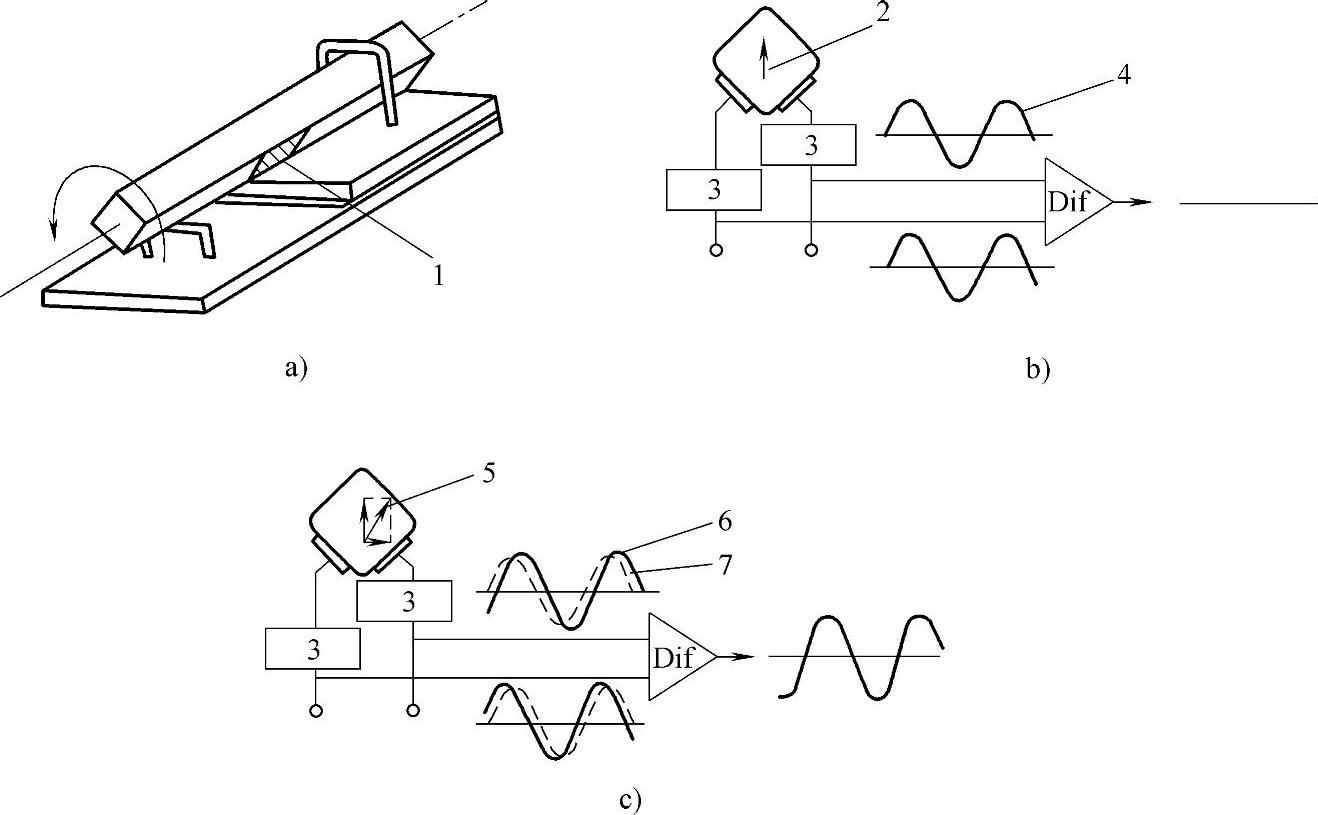
图10-77 振动型角速度传感器
a)构成 b)无旋转时 c)旋转时
1—压电元件 2—振子振动成分 3—电流检测 4—振动信号 5—哥氏力成分 6—输入信号 7—哥氏力信号
哥氏力是指旋转坐标内具有速度的物体所受到的力,力的方向既与旋转轴垂直,也与物体的速度方向垂直,而力的大小与物体的速度与系统的转速成正比。
当车辆旋转时,角速度传感器振子随之转动,这时,测出的压电元件电流包含有振动和哥氏力两部分。角速度传感器内部信号处理电路是相邻两压电元件输出信号的相减,这样,就消除了振动部分同频又同相两个信号(图10-77b),只剩下反映哥氏力的信号(图10-77c)。将电流信号转换为电压信号,就可得到与旋转角速度成一一对应关系的输出信号。
振动型角速度传感器应用于车辆主动稳定控制系统(ASC),实例如图10-78所示。ASC是在防抱死制动系统(ABS)和防滑转控制系统(ASR)的基础上,又加上角速度传感器、横向减速度传感器(G)、主油缸压力传感器、蓄压器压力传感器等部件。
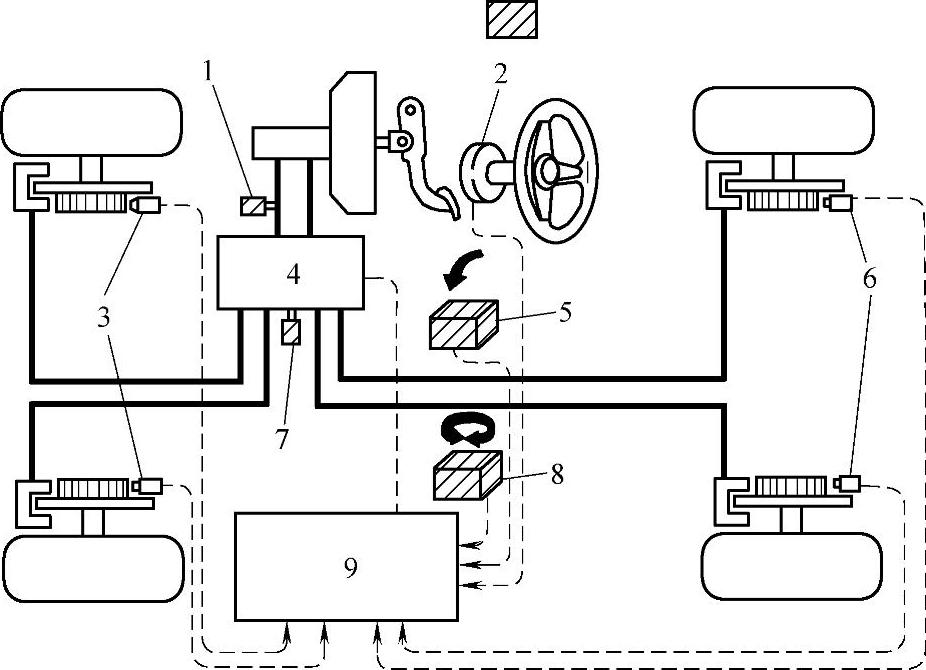
图10-78 ASC的构成
1—主油缸压力传感器 2—转向盘转角传感器 3、6—车轮转速传感器 4—制动压力调节器 5—横向G传感器 7—蓄压器压力传感器 8—角速度传感器 9—ABS ECU
ASC的作用示例如图10-79所示。ASC通过对4个车轮制动力的控制,实现车辆的行驶稳定性控制。例如,当ECU根据角速度传感器及其他相关传感器的信号,判断出车辆转向不足时,就输出控制信号,减小前外轮的制动力、增大后内轮的制动力(图10-79a),产生一个抑制转向不足(与自转同向)的转矩。ECU如果判断出车辆转向过度,则增大前外轮的制动力、减小后内轮的制动力(图10-79b),产生一个抑制转向过度(与自转反向)的转矩。当ECU判断出车辆转向时速度过快时,对前内侧车轮施以制动,使其减速,实现安全平稳的转向。(https://www.xing528.com)
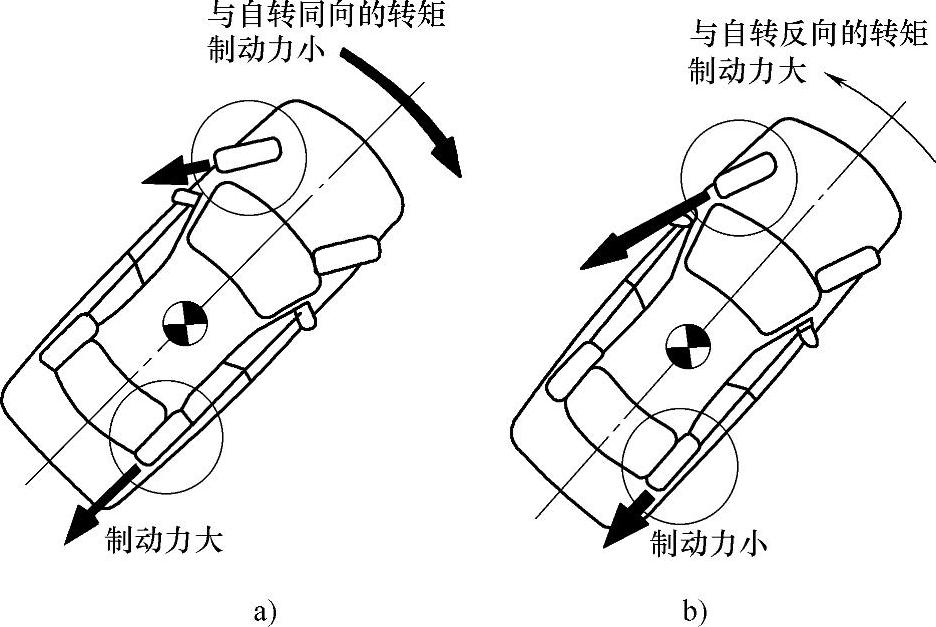
图10-79 ASC的作用示例
a)转向不足 b)转向过度
2.音叉式角速度传感器
音叉式角速度传感器的结构如图10-80所示。音叉式角速度传感器的本体为音叉形,振子由振动(激振)和检测两部分构成,两者互成90°。在音叉上粘贴有压电陶瓷片(PTZ)。
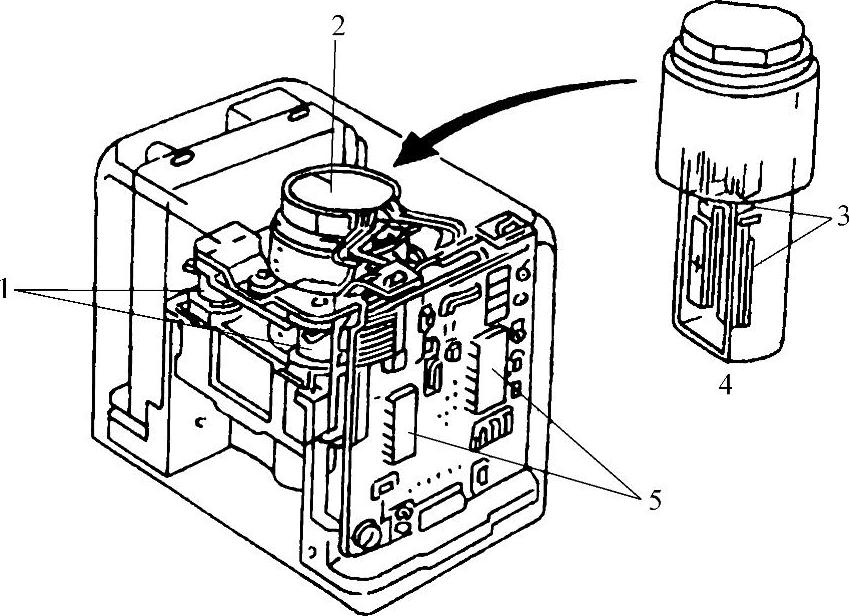
图10-80 音叉式角速度传感器的结构
1—缓冲器 2、4—传感器本体 3—电压元件 5—专用集成电路(IC)
音叉式角速度传感器原理如图10-81所示。当交流电压加于激振PTZ时,检测PTZ也总是在左右方向(V方向)振动。当车辆转弯(ω方向)时,哥氏力作用于检测PTZ,在与激振方向垂直的F方向的力,使检测PTZ产生交流电压信号。此信号包含有激振PTZ产生的振荡波,经放大后进入检波电路,检波后输出反映旋转方向和旋转速度的信号,再经整形电路整形后,输出与车辆旋转角速度呈线性关系的电压信号。
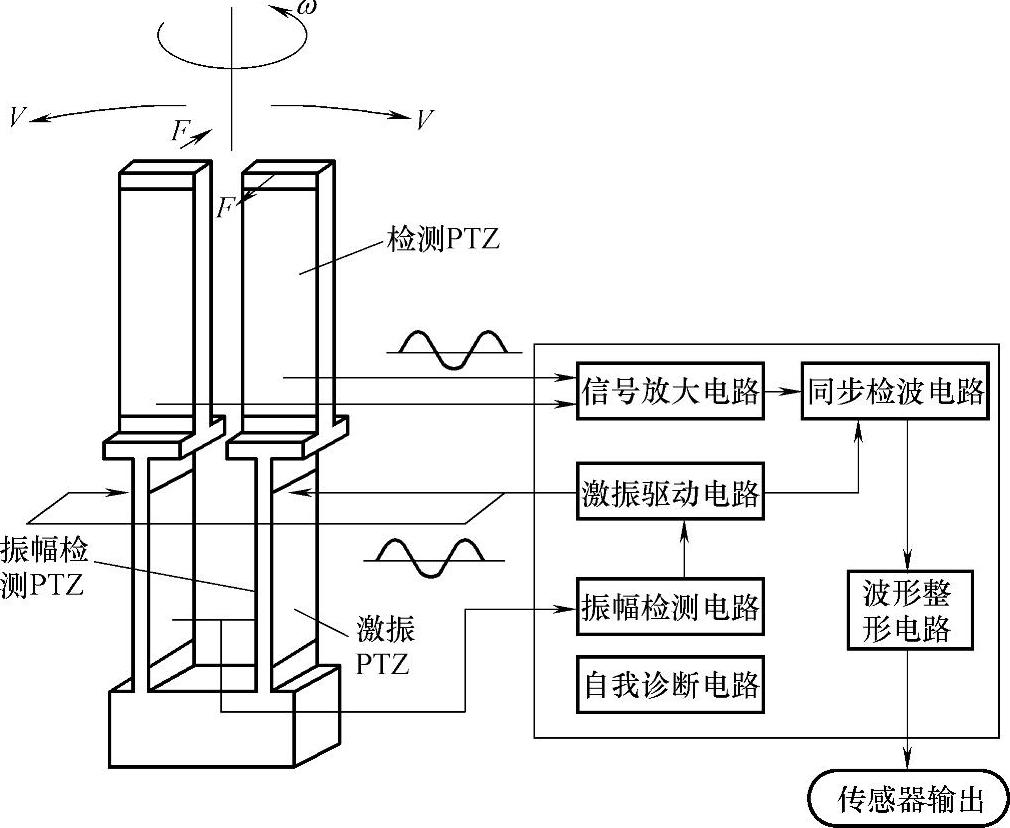
图10-81 音叉式角速度传感器的工作原理
音叉式角速度传感器的优点是:两个振子是反向运动的,其产生的哥氏力的方向也相反,因此,车辆前后、左右方向加速度所形成的挠曲变形可以互相抵消,从而提高了测量的精度。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。