



常用水平角观测方法有测回法和方向观测法。
1.测回法
测回法用于观测两个方向之间的单角。如图5-22所示,要测量BA、BC两方向间的水平角β,在B点安置好经纬仪后,观测∠ABC一个测回的操作步骤如下:

图5-22 测回法观测水平角
(1)盘左(竖盘在望远镜的左边,也称正镜)瞄准目标点A,旋开水平度盘变换锁止螺旋,将水平度盘读数配置在0°左右。检查瞄准情况后读取水平度盘读数为0°06′24″,计入表5-1的相应栏内。
A点方向称为零方向。由于水平度盘是顺时针注记,因此选取零方向时,一般应使另一个观测方向的水平度盘读数大于零方向的读数。
(2)旋转照准部,瞄准目标点C,读取水平度盘读数为111°46′18″,计入表5-1的相应栏内。计算正镜观测的角度值为111°46′18″-0°06′24″=111°39′54″,称为上半测回角值。
(3)纵转望远镜至盘右位置(竖盘在望远镜的右边,也称倒镜),旋转照准部,瞄准目标点C,读取水平度盘读数为291°46′36″,计入表5-1的相应栏内。
(4)旋转照准部瞄准目标点A,读取水平度盘读数为180°06′48″,计入表5-1的相应栏内。计算倒镜观测的角度值为291°46′36″-180°06′48″=111°39′48″,称为下半测回角值。
表5-1 水平角读数观测记录(测回法)
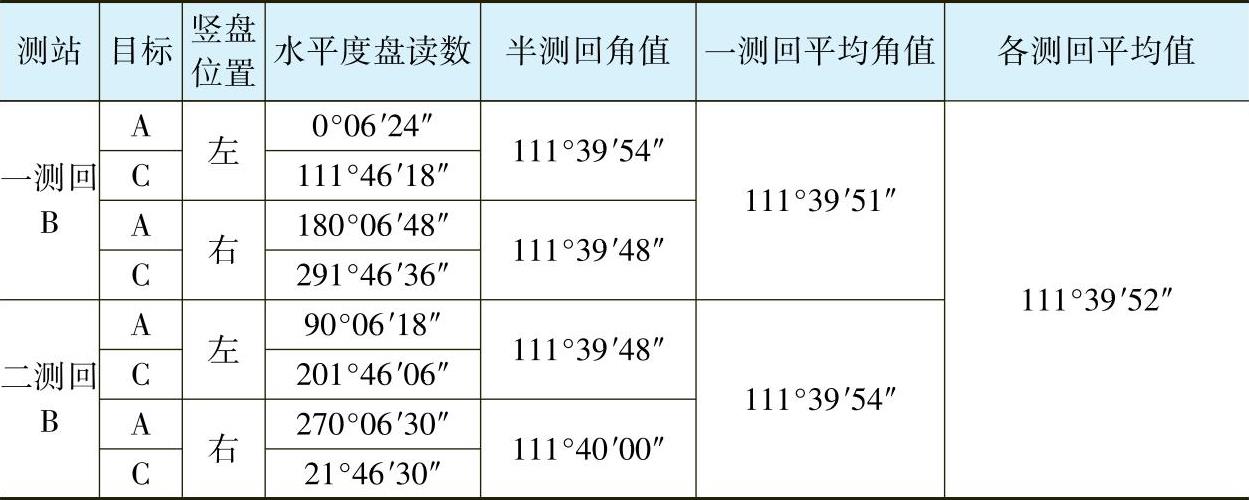
(5)计算检核。计算出上、下半测回角度值之差为111°39′54″-111°39′48″=6″,小于限差值±40″时取上、下半测回角度值的平均值作为一测回角度值。
测回法半测回角差的允许值,根据图根控制测量的测角中误差为±20″,一般取中误差的两倍作为限差,即为±40″。
当测角精度要求较高时,一般需要观测几个测回。为了减少水平度盘分划误差的影响,各测回间应根据测回数n,以180°/n为增量配置水平度盘。
表5-1为观测两测回,第二测回观测时,A方向的水平度盘应配置为90°左右。如果第二测回的半测回角差符合要求,则取两测回角值的平均值作为最后结果。
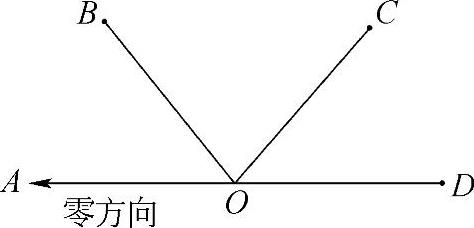
图5-23 方向观测法观测水平角
2.方向观测法
当测站上的方向观测数不少于3时,一般采用方向观测法。如图5-23所示,测站点为O,观测方向有A、B、C、D四个。在O点安置仪器,在A、B、C、D四个目标中选择一个标志十分清晰的点作为零方向。以A点为零方向时的一测回观测操作步骤如下:
(1)上半测回操作。盘左瞄准A点的照准标志,将水平度盘读数配置在0°左右(称A点方向为零方向),检查瞄准情况后读取水平度盘读数并记录。松开制动螺旋,顺时针转动照准部,依次瞄准B、C、D点的照准标志进行观测,其观测顺序是A→B→C→D→A,最后返回到零方向A的操作称为上半测回归零,两次观测零方向A的读数之差称为归零差。规范规定,对于DJ6经纬仪,归零差不应大于18″。
(2)下半测回操作。纵转望远镜,盘右瞄准A点的照准标志,读数并记录,松开制动螺旋,逆时针转动照准部,依次瞄准D、C、B、A点的照准标志进行观测,其观测顺序是A→D→C→B→A,最后返回到零方向A的操作称为下半测回归零。至此,一个测回观测操作完成。如需观测几个测回,各测回零方向应以180°/n为增量配置水平度盘读数。
(3)计算步骤
1)计算2C值(又称两倍照准差)。理论上,相同方向的盘左、盘右观测值应相差180°,如果不是,其偏差值称为2C,计算公式为(https://www.xing528.com)
2C=盘左读数-(盘右读数±180°)(5-9)
式(5-9)中,盘右读数大于180°时,取“-”号;盘右读数小于180°时,取“+”号,计算结果填入表5-2的第6栏。
2)计算方向观测的平均值。计算式为

使用式(5-10)计算时,最后的平均读数为换算到盘左读数的平均值,即盘右读数通过加或减180°后,应基本等于盘左读数,计算结果填入表5-2的第7栏。
3)计算归零后的方向观测值。先计算零方向两个方向值的平均值(见表5-2中括号内的数值),再将各方向值的平均值均减去括号内的零方向值的平均值,计算结果填入表5-2的第8栏。
表5-2 方向观测法观测手簿

4)计算各测回归零后方向值的平均值。取各测回同一方向归零后方向值的平均值,计算结果填入表5-2的第9栏。
5)计算各目标间的水平夹角。根据表5-2的第9栏的各测回归零后方向值的平均值,可以计算出任意两个方向之间的水平夹角。
3.方向观测法的限差
方向观测法的限差应符合表5-3的规定。
表5-3 方向观测法的限差

当照准点的垂直角超过±3°时,该方向的2C较差可按同一观测时间段内的相邻测回进行比较,其差值仍符合表5-3的规定。按此方法比较应在手簿中注明。
在表5-2的计算中,两个测回的归零差分别为6″和12″,小于限差要求的18″;B、C、D三个方向值两测回较差分别为5″、4″、7″,小于限差要求的24″。观测结果满足规范的要求。
4.水平角观测的注意事项
(1)仪器高度应与观测者的身高相适应;三脚架要踩实,仪器与脚架连接应牢固,操作仪器时不要用手扶三脚架;转动照准部和望远镜之前,应先松开制动螺旋,操作各螺旋时,用力要轻。
(2)精确对中,特别是对短边测角,对中要求应更严格。
(3)当观测目标间高低相差较大时,更应注意整平仪器。
(4)照准标志要竖直,尽可能用十字丝交点瞄准标杆或测钎底部。
(5)记录要清楚,应当场计算,发现错误,立即重测。
(6)一测回水平角观测过程中,不得再调整照准部管水准器气泡,如气泡偏离中央超过2格时,应重新整平与对中仪器,重新观测。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。