



1.概述
巡航控制也称定速控制,它是一种闭环控制系统。驾驶人对汽车速度进行设定后,巡航系统对汽车的实测速度作出反应,并据此调节节气门,使汽车自动保持在所需速度上。这里反应时间非常关键,反应慢会使车速有忽快忽慢的感觉。
巡航控制系统常用的执行器(节气门驱动装置),有电动机驱动和真空驱动两种装置。
如前所述,电子节气门即是典型的电动机驱动装置,在这里,“巡航控制”主要是为发动机控制单元增加了一项新的功能。在很多情况下,真空驱动装置比较常用。真空驱动装置如图3-26、图3-27所示,本体是一个密封圆筒,内有连接节气门拉索的膜片、用于平衡真空的弹簧、通进气歧管的真空电磁阀(常闭)、通大气的通风电磁阀(常开)和清除电磁阀(常开)等组成。显然当清除电磁阀或通风电磁阀失电时,膜片右腔和大气连通,节气门拉索在弹簧力和大气压力作用下,处于松弛状态,巡航控制不起作用或汽车退出了巡航状态。当清除电磁阀得电关闭、真空电磁阀得电打开后,汽车进入巡航控制状态:
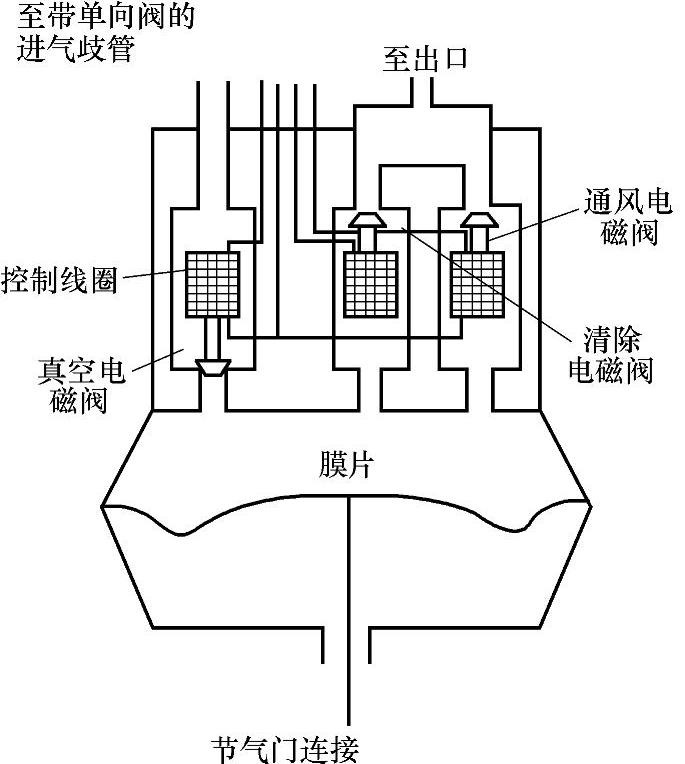
图3-26 真空驱动装置

图3-27 真空驱动装置的控制
如实际车速低于巡航车速,通风电磁阀将得电关闭,膜片在真空作用下拉动节气门拉索,车速增加;反之,通风电磁阀将失电打开,泄放部分真空以放松节气门拉索,降低车速;当实际车速即为巡航车速或达到巡航车速时,真空电磁阀失电关闭、其余二阀得电关闭,即三阀全关,膜片在既定真空和节气门的复位力作用下静止,汽车保持在巡航速度下行驶。
发动机控制单元根据车速传感器信号,按上述模式控制各电磁阀的通断。
2.巡航控制系统的其他部件
(1)主开关和警报灯 主开关为一个简单的ON/OFF开关,位于仪表板下方驾驶人易于操作的位置。指示灯可与主控开关组合在一起,也可作为仪表主显示盘的一部分,但必须布置在驾驶人的视野范围内。
(2)设置开关及复位开关 有些开关安装在转向盘或转向杆上。若转向盘存在滑转,必须用卡环连接。设置按钮用来将速度输入存储器,也可用来增加汽车行驶速度和存储器内的速度设定植。恢复按钮允许汽车恢复到上次设置的速度或暂时中断控制,如图3-28所示。
(3)制动开关 该开关非常重要,因为如果巡航控制系统试图保持一恒定速度,这时施加制动就很危险。该开关要求很高,安装在适当的位置或作为制动灯开关的一个附件,制动开关与制动踏板联动,对该开关的调整是否正确很重要,如图3-29所示。
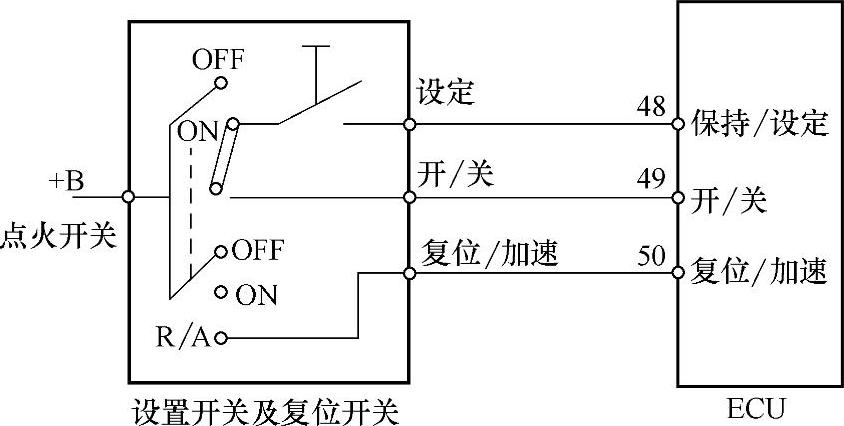
图3-28 设置开关及复位开关
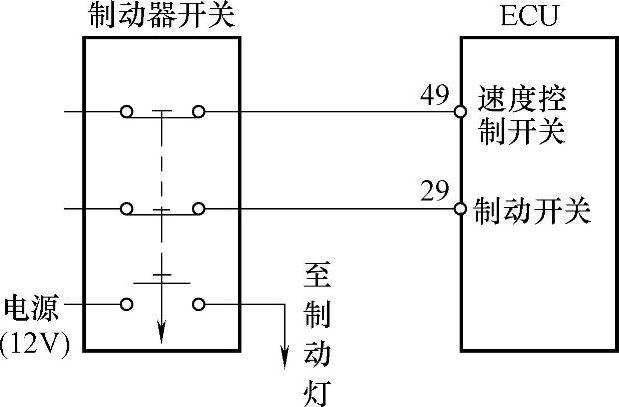
图3-29 制动开关
(4)离合器或自动变速器开关 离合器开关的安装方式与制动开关相似。离合器开关与离合器踏板联动,踩下离合器踏板,即退出巡航控制,以防止发动机转速过高。自动变速器开关用于控制巡航控制系统能否进入状态,只有当该开关位于D位时,才允许巡航控制系统进入工作状态。如果设定巡航速度太高,将导致发动机转速过快。配制自动变速器开关的目的就是为了发生这种情况。
(5)车速传感器 车速传感器与车速表传感器是同一个传感器,如果不是,则车速传感器可以有很多类型,最常用的是产生的脉冲信号频率与汽车速度成正比。
3.巡航控制操作
1)当点火开关、主开关和制动开关中任意一个开关断开时,系统都将退出巡航状态。(https://www.xing528.com)
2)在巡航状态踩下离合器踏板或制动踏板后又松开时,清除电磁阀将得电关闭,此时如按下复位开关,真空电磁阀和通风电磁阀将得电,使汽车重新进入巡航状态并将恢复到制动前的巡航速度。也可以按下设置开关按钮保持汽车以当前速度行驶。
3)在某个设置速度下进行巡航控制时,驾驶人可持续按下设置按钮来提升汽车行驶速度,当加速到所需的速度时,再释放该按钮。如果想加速,例如超车,踩下加速踏板即可。如欲恢复原速度时,松开加速踏板,汽车则减速,直到回到上次设定速度。
4)当主开关(速度控制开关)断开时,多数系统不能在存储器中保存速度设置。对巡航控制进行设置的条件是:
①汽车速度高于40km/h。
②速度变化小于8km/h。
③自动变速器变速杆必须放在D位。
④制动器或离合器不工作。
⑤发动机转速稳定。
一旦系统被设定,速度误差就会保持在大约3~4km/h。除非主开关被切断,否则上一次设置速度仍保持在存储器中。
4.自适应巡航控制
传统的巡航控制虽然已经发展到一个较高程度,但不是很实用。因为在很多道路条件下驾驶人经常要取代巡航控制系统进行提速或减速。而自适应巡航控制可以自动的根据当前交通状况调整车速。图3-30所示为自适应巡航系统的工作原理,这个系统主要有三个功能:
1)维持驾驶人设定的车速。
2)自动调节车速并维持与前面车辆的距离。
3)有撞车危险时发出警报。
图3-30所示为自适应巡航控制系统的组成。相对传统的巡航控制系统,它主要增加的部分是:前方车距传感器和转向盘角度传感器。其中,车距传感器是最重要的,转向盘角度的信息是为了补充前方车距传感器产生的信号。目前使用的车距传感器有两种:雷达型和激光型。它们都内置了发射和接收元件,前者使用的是频率为35GHz的微波;根据反射时间就能判断前方车辆的距离;后者利用激光两极真空管产生红外信号,反射信号可通过激光两极真空管侦测得到。
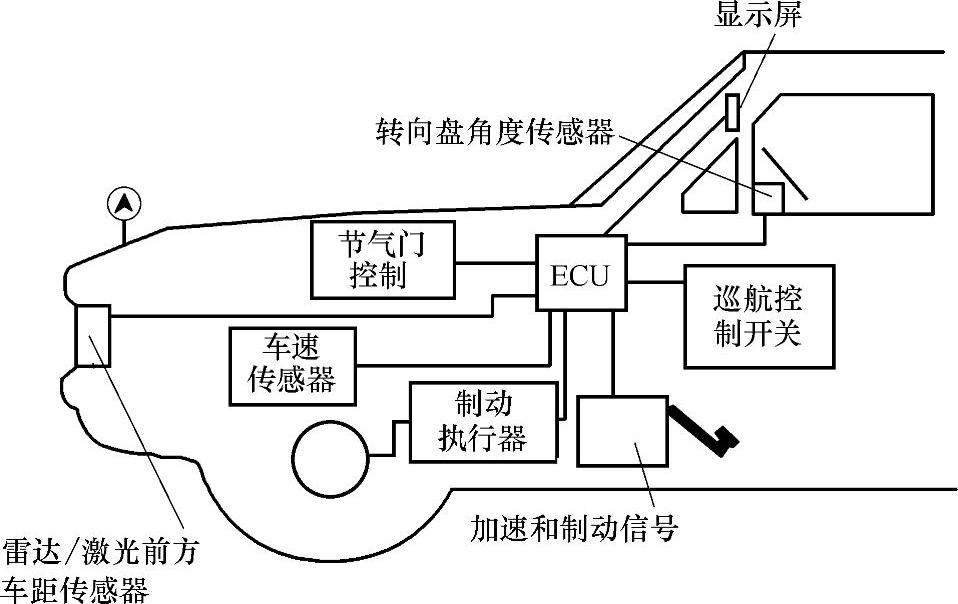
图3-30 自适应巡航控制系统的组成
这两种不同的传感器具有各自的优缺点。前者不受雨雾影响,后者对于车辆前方真正的反射物更具选择性;前者对于桥及其他一般的路边目标都具有很强的反射作用,同时它也会对多岔路的反射物失去信号。因此在理想天气条件下,激光型系统似乎是最好的选择,但在天气变化后又变的不可靠。无论是哪一种前车距传感器,都必须解决安装了相同系统的车辆之间的互相干涉问题。
当前方车距传感器的信号侦测到前方有障碍时,自适应巡航控制系统会使车辆自动减速。如果系统发现在完全放下加速踏板时还不能在一定距离内使车辆停下,系统会报警,让驾驶人踩下制动踏板来进一步控制车辆的减速。
更先进的自适应巡航系统同时还能控制车辆的加速及制动系统,但在现有条件下,还难以得到实际应用。总之,设计自适应巡航控制的目的只是为了减轻驾驶人的负担,而不是为了完全地控制车辆。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。