



在单片机中运行的稳控系统控制程序,其输入一般为四路轮速信号和踏板信号,轮速脉冲信号由单片机进行捕捉计算,踏板信号通过I/O口读入。而在软件仿真环境下,输入为数据文件中的轮速和踏板信息。稳控系统控制周期的处理:在单片机中的软定时中断相当于时钟,可以实现稳控系统的控制周期。而在软件仿真环境下,每读入一组监控数据,则表示一个控制周期的开始。软件仿真中,轮速的计算直接来自数据文件,不依赖于定时器。在软件仿真环境中,把对硬件寄存器、端口的操作,转变为软件环境中对定义的变量的操作。监控代码段的修改:软件仿真的环境下,将监控数据直接写到文件。图6-18所示为软件仿真调试的流程图。
将实验采集到的单片机内部信息,输入到软件仿真环境中,则能完全再现稳控系统控制程序的控制量计算和控制逻辑。在软件仿真环境中对程序进行修改调试,将监控数据输入,可以对比验证稳控系统软件调试修改的效果。通过模拟监控信息,验证稳控系统控制程序对各特殊工况的适应性及对错误的识别和处理能力。在实车实验过程中,使用带有串口输出的ECU,并含有五轮仪信号,用笔记本电脑对单片机送出的内部运行信息进行采集。某次高附着制动实验后,用稳控系统数据分析软件对其数据进行离线分析得到的曲线如图6-19所示。用软件的计算功能得出本次制动的平均制动减速度为-7.60m/s2,轮速波动较大,制动强度一般,制动效果有待进一步提高。分析发现参考车速与车速偏差较大,初步认定滑移率计算有一定问题。
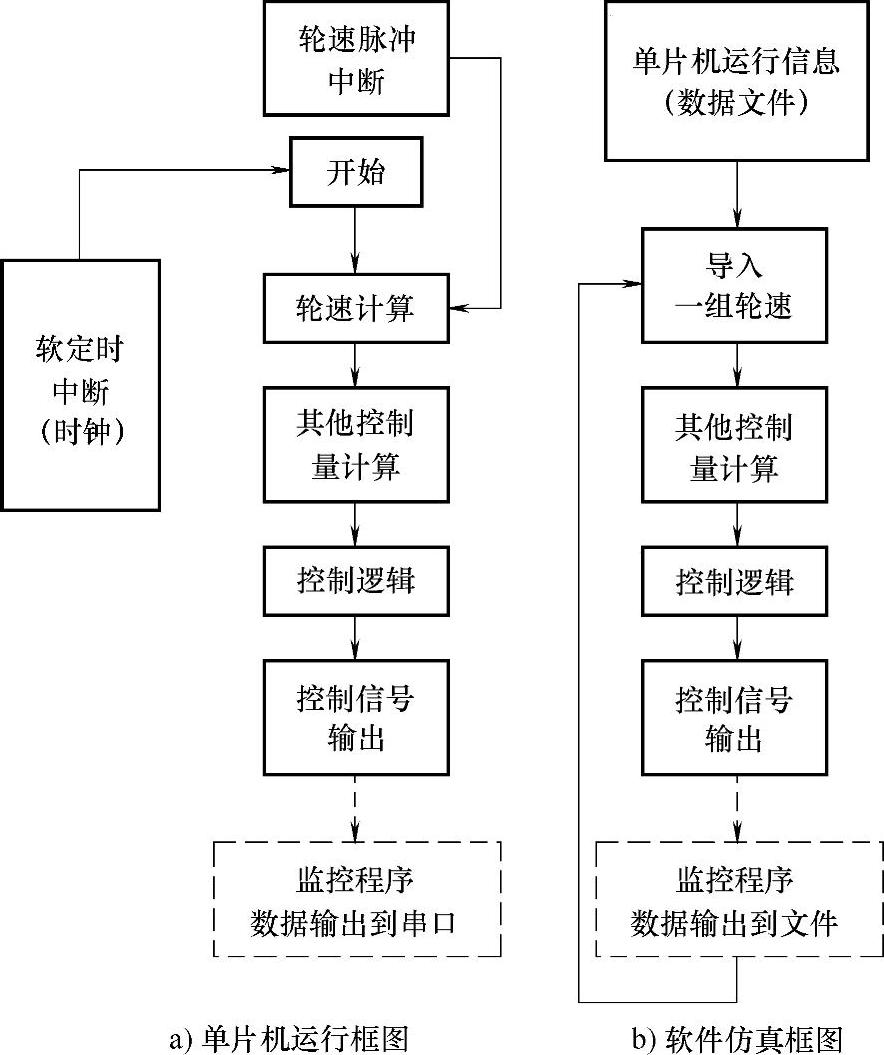
图6-18 软件仿真调试流程图
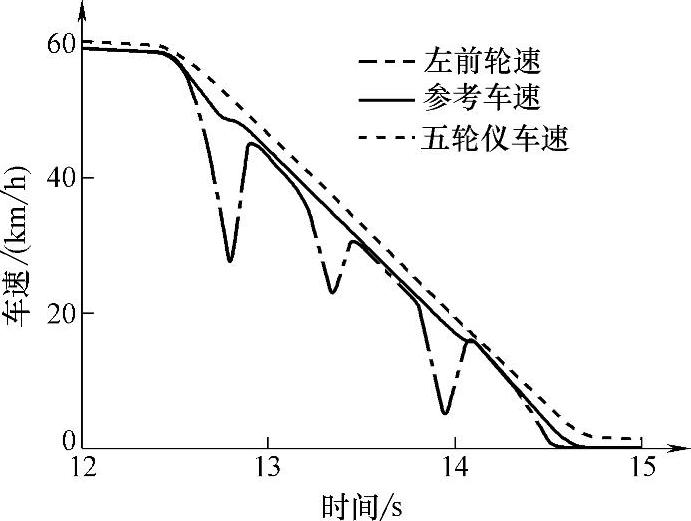
图6-19 高附车速控制曲线(https://www.xing528.com)
在软件仿真环境下,将本次制动数据导入,经过控制流程再现,调试分析得到参考车速计算的分离点和分离斜率设置有一定问题,修改后对控制过程的数据进行再计算得到逻辑修改后的参考车速如图6-20所示,修正后的参考车速计算合理,满足控制要求。将修改后的控制程序编译下载至ECU中,再次进行实车实验,控制效果明显改善。修改后相同路段的制动曲线如图6-21所示,制动平均减速度为-8.11m/s2。
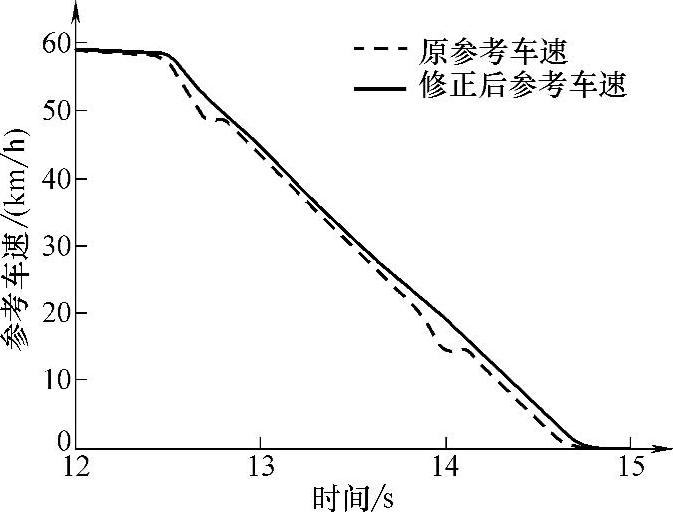
图6-20 软件仿真调试后车速曲线
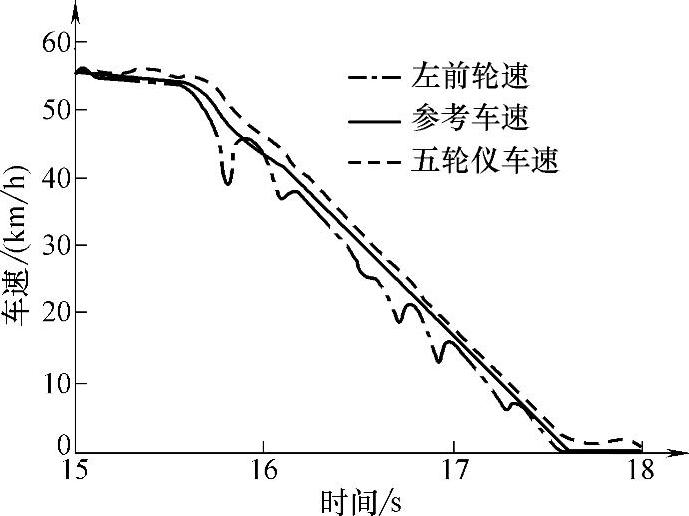
图6-21 参考车速修正后的车速曲线
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。