



根据稳控系统的控制原理,稳控系统压力调节的目标是使车轮制动力保持在峰值纵向附着系数φp对应的制动力附近。这就要求车轮的滑移率控制在峰值纵向附着系数φp对应的最佳滑移率λp附近区域,如图6-1所示的区域。
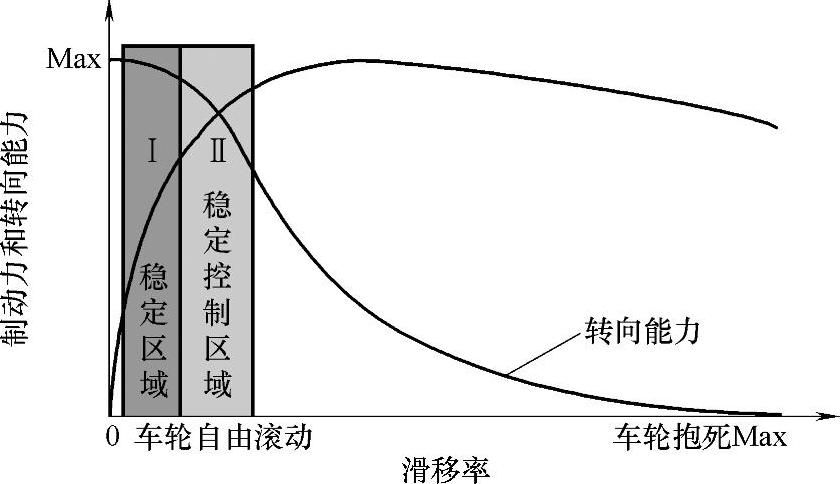
图6-1 制动工况稳控系统控制区域图(https://www.xing528.com)
为使车轮滑移率可以长时间保持在λp附近,需要对车轮制动压力进行稳控系统调节,从而使车轮交替运行在理想的控制区域Ⅰ、Ⅱ。在区域Ⅰ时,由于制动力低于峰值附着系数对应的制动力,为尽可能地提高附着系数利用率,稳控系统要对车轮制动器进行增压操作。随着压力的升高,制动力变大,车轮滑移率增大,纵向附着系数增大,路面附着力增大。由于制动力与路面附着力低于φp对应的峰值路面附着力,车轮没有迅速抱死的趋势,车轮运动状态是稳定的,因此可以采用缓慢增压的方式来延长车轮在区域Ⅰ的工作时间。随着缓增压的持续,车轮制动力会超过峰值附着系数φp对应的制动力,车轮滑移率超过λp到达区域Ⅱ。此时随着车轮制动力的增加,车轮滑移率增大,纵向附着系数变小,导致路面附着力减小,制动力大于路面附着力并且与路面附着力的差异越来越大,车轮有加速抱死的趋势,因此车轮在区域Ⅱ的运动状态是不稳定的。要减少车轮在区域Ⅱ的工作时间,需要较快速的减压,使车轮制动力小于路面附着力,降低车轮滑移率,从而使车轮迅速回到稳定区域Ⅰ。另一方面,当车轮滑移率偏低而运行在区域Ⅰ左侧时,制动压力水平较低,如果增压速率过慢,则车轮制动力会较长时间处于较低水平,不利于提高车辆制动效能。而车轮在区域Ⅱ减压时,如果减压速率过快,就容易出现车轮制动压力快速降低到很低的水平,导致车轮工作在区域Ⅰ左侧。因此,稳控系统对压力调节的要求是在区域Ⅰ的增压速度要稍慢,而在区域Ⅱ的减压速度则稍快。为了达到控制效果并稳定制动效能,稳控系统需要控制压力迅速达到峰值附着系数对应的水平,并在其附近精细调节增减压速率;从制动稳定性考虑,对于左右车轮存在附着差异的情况,压力的增减会产生相应的横摆力矩,为降低方向修正操控的难度,需要限制两侧压力变化速率的差异。因此,稳控系统主要的标定参数是识别各工况轮缸压力水平门限参数、各工况下的增减压速率控制参数等。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。