



转向与制动联合工况下的车辆安全性是稳控系统控制的研究重点[104]。转向影响参考车速、车轮滑移率等稳控系统控制参数的计算,而转向时车辆载荷转移也使轮胎受力与直线制动有很大差异。在转向制动的仿真研究中,转向参数一般是给定的转向盘转角和车辆起始车速,在稳控系统特殊工况控制研究中有对制动前转向方向的识别。要改进稳控系统在转向制动工况下的性能,需要精确识别车辆的转向状态,以此来调整稳控系统参数计算和控制策略。
为描述车辆转向时的主要运行状态,需定义车辆转向参数P。P要求能确定转向工况、便于获取并用于稳控系统控制参数计算。确定P由3个参量构成,如式(5-43)所示。

式中 V——车速;
Ts——转向方向;
δ——前轮转角。
车速V为整车质心相对地面的速度。V通常利用稳控系统轮速进行间接识别。直线制动时车速根据四轮轮速通过一定计算策略来获得,转向制动时,需要调整参考车速计算策略以便更接近实际车速。转向方向Ts区分车辆左转还是右转,稳控系统根据Ts对两侧车轮的控制参数进行不同的调整。Ts取值1、-1、0,分别对应左转向、右转向和非转向。前轮转角δ反映车辆转向的剧烈程度。相同车速下,δ越大,车辆转向越急,载荷转移和轮胎的侧向受力越显著。转向制动过程中一般视δ为定值。目前车辆转向状态参数主要用于车辆稳定性控制系统[105]。VSC通过传感器直接测量转向盘转角、横摆角速度与侧向加速度,分析车辆运动状态,实现对车辆横摆角速度与质心侧偏角的控制。通过转向盘转角传感器测得转向操纵的转角方向Ts和转角θ,根据θ可以计算车轮转角δ=θ/iw,iw为转向系统的角转动比。
直接测量的转角参数准确性高,而且抗干扰性能好,但需要根据转向盘传感器数据获取方式改造稳控系统。随着车辆CAN平台的普及,稳控系统和转向盘传感器可以都设计成CAN网络的节点,利用CAN总线实现数据交互,稳控系统采集轮速信号,需要车辆模型的运动学关系,根据四轮轮速的差异进行转角的间接识别。以图5-11所示的四轮车辆模型为研究对象,假设车辆转向时只有前轮有转角,在车辆坐标系中进行转向过程的运动学分析。
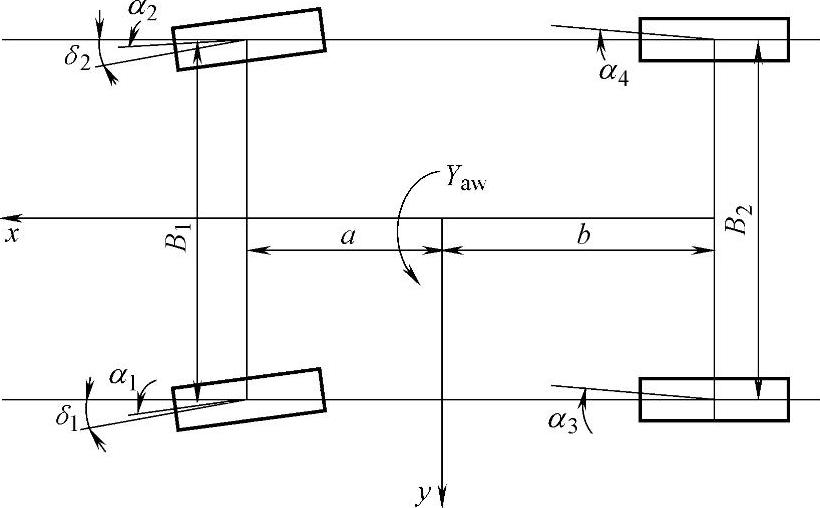
图5-11 整车四轮模型
整车质心的速度矢量 ,整车转向时绕z轴的横摆角速度
,整车转向时绕z轴的横摆角速度 ,两前车轮转角δ1、δ2,整车质心到前轴和后轴的距离a,b,前轴轮距B1,后轴轮距B2。正常道路行驶中的车辆进行转向操纵时,转向盘转角经过转向传动比后产生的车轮转角δ较小,此时两个转向车轮转角差异很小,对大多数车辆,可以认为δ1=δ2=δ,B1=B2=B。
,两前车轮转角δ1、δ2,整车质心到前轴和后轴的距离a,b,前轴轮距B1,后轴轮距B2。正常道路行驶中的车辆进行转向操纵时,转向盘转角经过转向传动比后产生的车轮转角δ较小,此时两个转向车轮转角差异很小,对大多数车辆,可以认为δ1=δ2=δ,B1=B2=B。
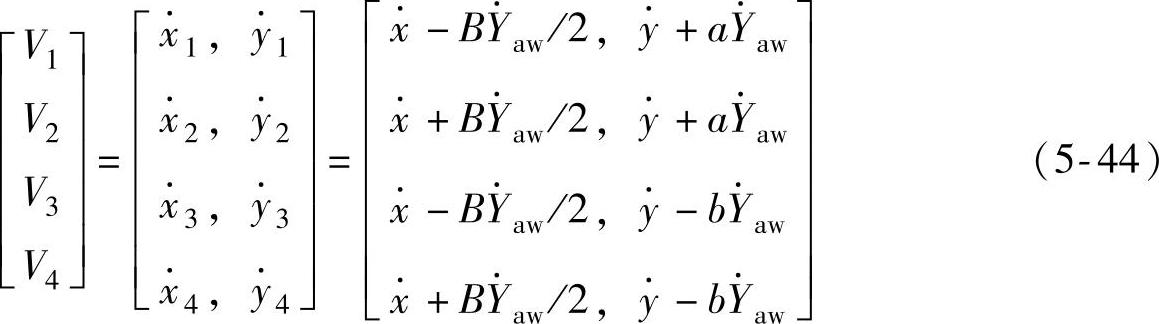
自由转动情况下4个车轮的速度矢量为
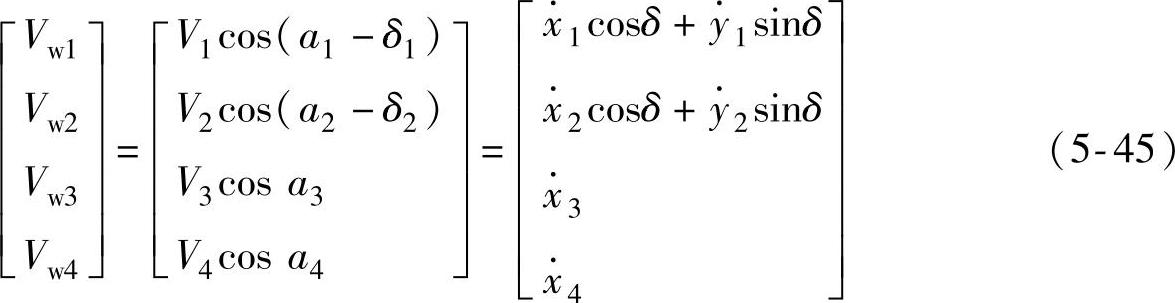
车轮无转角时,侧偏角 ,前轮有转角时,侧偏角为ai-δi,4个车轮沿各自车轮平面的速度分量为Vwi,其中i=1、2、3、4,对应左前轮、右前轮、左后轮和右后轮,在无滑移工况下,Vwi等于轮速传感器测得的车轮速度为
,前轮有转角时,侧偏角为ai-δi,4个车轮沿各自车轮平面的速度分量为Vwi,其中i=1、2、3、4,对应左前轮、右前轮、左后轮和右后轮,在无滑移工况下,Vwi等于轮速传感器测得的车轮速度为
根据式(5-44)、式(5-45),可以得到式(5-46)。

由式(5-46)可得到整车质心处x轴速度分量为

前轴两轮速度差为(https://www.xing528.com)

后轮两轮速度差为

结合式(5-48)、式(5-49),前、后轴轮速差为

车辆横摆角速度为

四轮模型的轮速关系基于车轮自由转动工况,在有制动力时会受影响。因此基于轮速的转向参数间接识别分为三种工况:一是制动前转向的识别;二是制动中在稳控系统控制前转向的识别;三是稳控系统控制中转向的识别。前两种工况的识别只需要轮速信息,可以合并为稳控系统控制前的转向识别工况,最后一种工况需要综合轮速信号与稳控系统的控制信息进行转向识别。转向参数识别的另一个重点是后续参考车速的计算。稳控系统未进入控制时,轮胎运行状态比较稳定,传感器采集的轮速近似四轮模型中的轮速Vwi。对于稳控系统控制的转向制动,质心速度矢量中 通常比
通常比 小很多,根据式(5-47)可取参考车速如式(5-52)所示。
小很多,根据式(5-47)可取参考车速如式(5-52)所示。

根据二自由度车辆模型,稳态转向时车辆稳态横摆角速度增益如式(5-53)所示。

式中 L——车辆轴距,L=a+b;
K——车辆稳定性因数。
由于轮速信号受路面不平度、制动和驱动等影响,为提高识别准确性,识别策略中采用一定的抗干扰措施。稳控系统开始控制后进行的转向操纵,由于稳控系统对制动力的干预作用使轮速产生较大波动,此时单从四个轮速信号难以正确识别P的三个参量,必须结合稳控系统的控制状态。稳控系统处于直线行驶控制时,转向产生的轮速差异使内侧车轮滑移率偏大,内侧车轮处于减压阶段,而载荷转移又会使外侧车轮不容易抱死,外侧车轮处于增压阶段。在内侧车轮从减压转换到增压的控制时,内、外侧轮速差异近似符合四轮模型运动学关系。稳控系统识别这一特殊控制过程的逻辑为:
1)判断四个车轮所处的增、减压控制状态Inci和Deci(i=1、2、3、4,对应左前、右前、左后和右后轮),若一侧两轮同时减压而另一侧增压(左转时Dec1、Dec3、Inc2、Inc4有效,右转时Dec2、Dec4、Inc1、Inc3有效),且持续t0时间。
2)计算前、后轴车轮在保压到增压控制切换点的轮速差ΔV1、ΔV2和ΔV3,给Ts赋值,若Ts非0状态持续t1时间,则确认转向方向Ts。
3)确认Ts后参照稳控系统控制前的转向识别方法,依照四轮模型识别车轮转角δ和参考车速Vf。由于动态过程与稳态过程存在差异,因此在多个控制状态切换点都需要进行识别,通过数据处理来提高参数识别精度。
稳控系统通过匹配实验标定出识别稳控系统转向特殊控制过程的状态持续时间t0和t1,这两个时间太长则识别滞后过多,影响稳控系统整体控制性能,而太短则会影响识别准确性。对于制动中出现的转向,基于轮速识别会有一定滞后,但可使后续制动过程避免过多的减压,有利于改善整个制动过程中稳控系统的控制效果。
对于稳控系统控制前转向和稳控系统控制中的转向,在识别出转向后,都要进行后续参考车速估算。稳控系统参考车速的估算主要分两个阶段:在轮速处于低滑移率阶段时,轮速与车速差异较小,稳控系统根据设定的选取策略来选择某一轮速作为参考车速;而在轮速都处于大滑移率阶段时,参考车速进行插值估算。插值估算的重点是确定插值斜率,稳控系统根据车轮控制过程选取保压到增压的切换点作为插值点,前两个插值点的轮速可作为参考车速来计算插值斜率。直线制动时,任一个轮的轮速在符合选取策略时都可以直接作为被选择的参考车速或插值点车速,但转向制动时由于转向产生轮速差异,要对不同轮的轮速进行修正。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。