



车辆转弯制动时,产生的离心力与地面侧向力形成侧倾力偶矩使外侧车轮载荷增加,内侧车轮载荷减小,从而影响制动时的速度,这与直道制动有较大的差异。轮胎与路面的附着关系与轮胎侧偏角有关,最佳滑移率随着侧偏角的增大而增大,因此稳控系统需要对转弯工况进行识别,并对控制门限和控制目标进行修正。转弯工况算法逻辑框架如图4-30所示。

图4-30 转弯工况算法逻辑框架
1.滑移率算法
车辆转弯时,对稳控系统的参考滑移率的计算会有影响。稳控系统控制算法中,参考滑移率由参考车速按式(4-9)计算得到:

式中 i——i=0、1、2、3,分别代表左前轮、右前轮、左后轮、右后轮;
Vref——参考车速;
Srefi——参考滑移率;
ωi——轮速;
Ri——轮半径。
车轮的参考滑移率均是通过一个参考车速计算得到的。而车辆转弯时的车轮纵向滑移率计算需要考虑转向角、轮距、横摆角速度等的影响。在仿真平台上进行转弯工况的仿真,车辆以45km/h的初速进行左转弯制动,其理论滑移率和参考滑移率的结果如图4-31所示。
直接使用参考车速计算得到的参考滑移率与理论滑移率有偏差,内侧车轮参考滑移率偏大,外侧车轮参考滑移率偏小。在稳控系统的控制算法中,参考滑移率是重要的控制门限,当参考滑移率偏大时,则可能造成减压过多制动力不足的情况。
2.转弯状态识别
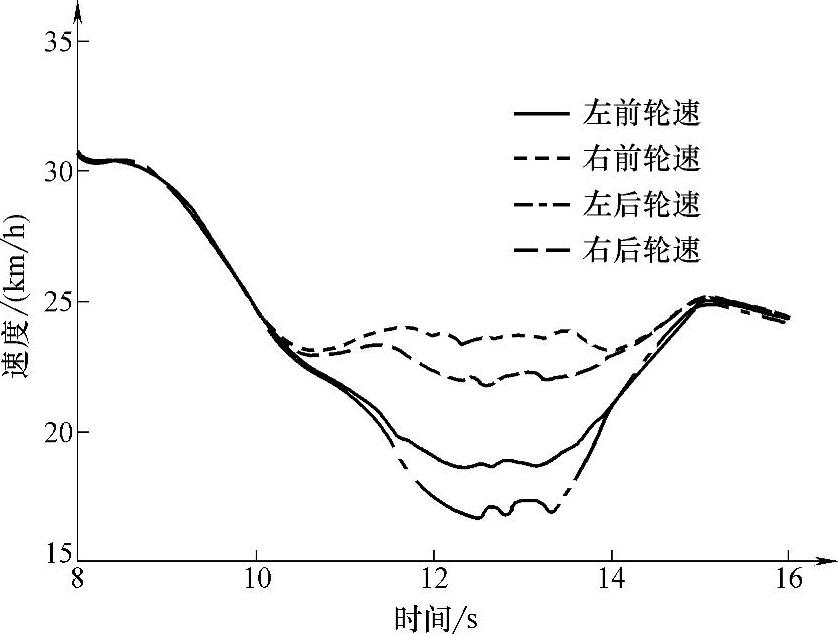
稳控系统转弯补偿算法主要是对转弯时滑移率计算的补偿,而对滑移率的计算补偿是基于车辆转弯状态识别的。由于稳控系统中不含有转向盘转角传感器、横摆角速度传感器等硬件,无法直接通过传感器获得转弯状态,因此需要研究稳控系统转弯状态识别算法,通过可以测量的量(如轮速)来判断车辆是否处于转弯状态。图4-32所示为左转弯的轮速实车数据,根据数据可知,当车辆转弯时,内外侧车轮会有轮速差出现,图中为左转弯状态,右前轮轮速大于左前轮轮速,同时右后轮轮速大于左后轮轮速。因此可根据两前轮和两后轮的轮速差综合判断车辆的转弯状态。具体算法为:
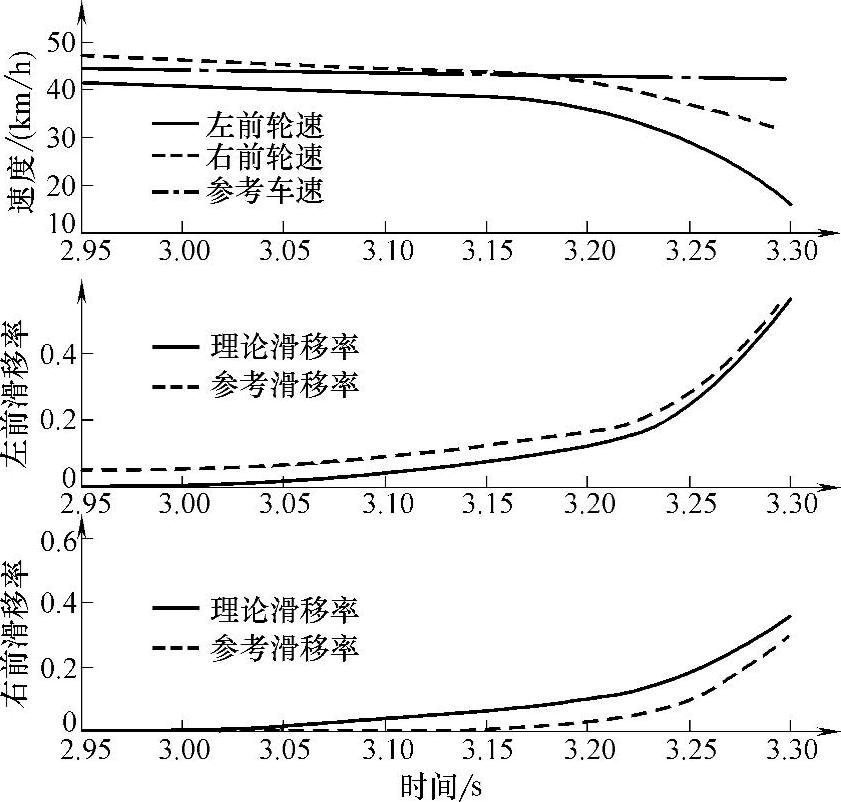
图4-31 转弯制动滑移率仿真计算
 (https://www.xing528.com)
(https://www.xing528.com)
图4-32 左转弯的轮速情况
1)普通路面转弯识别。左前轮速大于右前轮速超过设定值,并且左后轮速大于右后轮速超过设定值,定义为右转弯趋势,当右转弯趋势连续出现并超过设定时间,则判定为右转弯;右前轮速大于左前轮速超过设定值,并且右后轮速大于左后轮速超过设定值,定义为左转弯趋势,当左转弯趋势连续出现并超过设定时间,则判定为左转弯。
2)不平路面转弯状态识别。为了识别不平路面上的转弯状态,对轮速进行低通滤波;低通滤波后的左前轮速大于右前轮速超过设定值,并且左后轮速大于右后轮速超过设定值,定义为右转弯趋势,当右转弯趋势连续出现并超过设定时间,则判定为右转弯;低通滤波后的右前轮速大于左前轮速超过设定值,并且右后轮速大于左后轮速超过设定值,定义为左转弯趋势,当左转弯趋势连续出现并超过设定时间,则判定为左转弯。
转弯状态识别在未进入稳控系统控制前进行,这是由于进入稳控系统控制后,轮速差有可能是稳控系统控制的压力变化引起的,不能作为转弯状态的依据。转弯状态识别算法分为普通路面转弯识别和不平路面转弯识别,这是由于转弯状态的识别需要转弯趋势连续出现一段时间,而在不平路面上时,轮速波动大,有可能打断转弯趋势的连续出现,进而无法识别出转弯状态。设置较低的截止频率的低通滤波器,可以滤去不平路面引起的轮速的中高频波动,保证转弯状态的识别。当然滤波后的轮速有一定延迟,但其仅用于转弯状态识别,即使识别结果稍微延迟一些,也能够满足稳控系统需要,同时不影响其他控制量计算。以普通路面转弯识别与不平路面转弯识别中较早识别出的状态作为车辆的转弯状态。
3.参考滑移率补偿算法
通过转弯状态识别,对参考滑移率的计算进行补偿。因为参考滑移率为稳控系统的辅助门限,而且以产业化为目的的控制算法研究中,要充分考虑到制动的安全性,所以参考滑移率的计算偏保守,即允许参考滑移率略小于实际滑移率,而绝对不能大于实际滑移率,否则可能引起过度的减压而使制动强度不足。车辆转弯时,外侧车轮参考滑移率计算偏小,满足安全性要求,不进行补偿;内侧车轮参考滑移率偏大,需要进行修正。当转弯状态为左转弯时,左前轮和左后轮的参考滑移率分别乘以修正系数,修正系数为小于1的正数,由实车标定得到。当转弯状态为右转弯时,右前轮和右后轮的参考滑移率分别乘以修正系数,修正系数为小于1的正数,通过实车标定得到。进行转弯“部分制动”实验,部分制动与应急制动相对应,应急制动为驾驶人“狠”踩制动踏板,以紧急停车为目的,而部分制动是以减速为目的,驾驶人根据实际情况选择不同的制动力度,一般小于应急制动的制动力度。为了对比,在相同的制动工况下,分别进行无转弯补偿算法和有转弯补偿算法的实验。实验工况为某山区下坡转弯路况,路面有些颠簸,驾驶人意图为进弯时减速。图4-33a所示为不含转弯补偿算法的部分制动效果,由于滑移率计算有误差,误进入了稳控系统,驾驶人感觉制动踏板变“硬”,有冲击感,由于此工况不是以紧急停车为目的,稳控系统进入控制实际意义不大,反而引起了踏板的不舒适感。将稳控系统控制程序改为含有转弯补偿算法的程序,进行与上述相同工况的实验,保证制动初速、转向盘转角和制动力度一致。为了保证制动力度一致,实验中使用了踏板限位器,实验结果如图4-33b所示。可见,转弯补偿算法可以识别出转弯状态并对滑移率计算进行补偿,防止误进入稳控系统,在本工况下稳控系统并没有工作,踏板正常,与驾驶人意图相符。
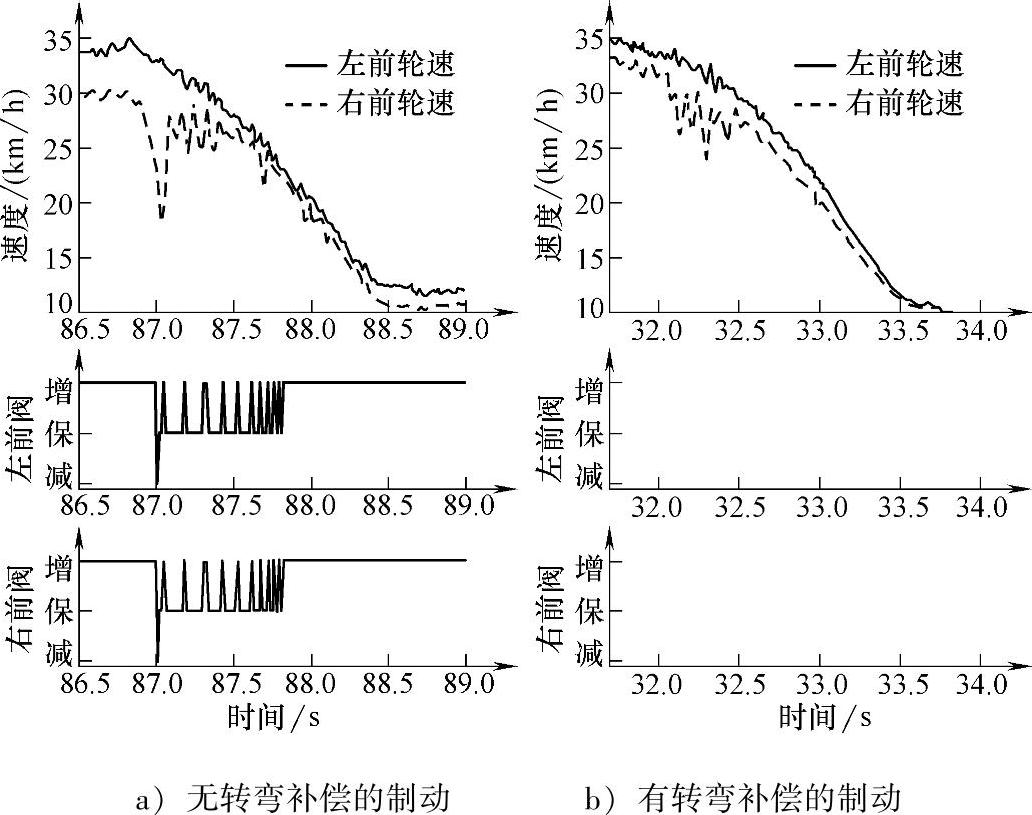
图4-33 下坡转弯工况制动实车
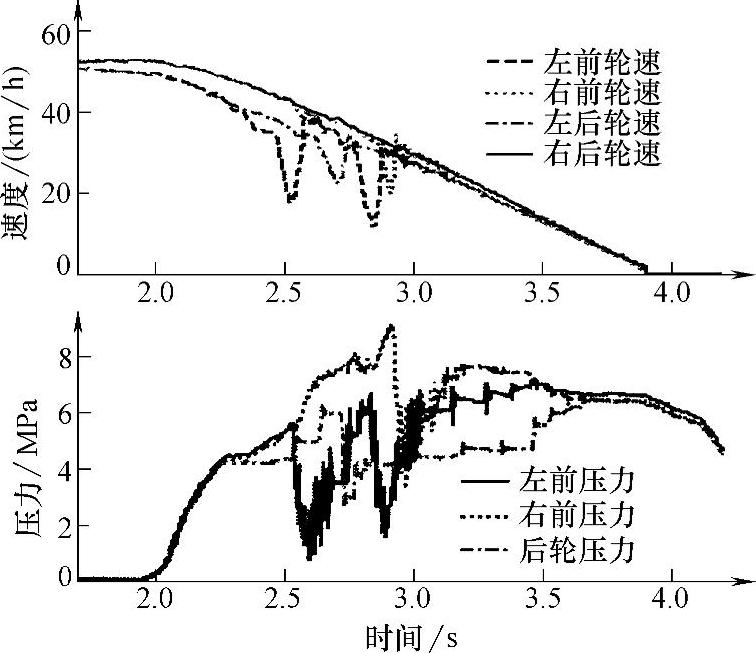
图4-34 有转弯补偿转弯应急制动实车
实验结果如图4-34所示,转弯补偿算法可以对转弯时的滑移率进行合理补偿,保证了转弯的制动效果,踏板冲击小,可以保证稳控系统在转弯制动工况的可靠性和控制效果。
4.沟坎工况算法
装有稳控系统的车辆通过沟坎路况时,车轮受到较大冲击,轮加速度和滑移率计算值波动很大,容易短时间内达到稳控系统进入的门限,从而引起稳控系统误动作。稳控系统误动作不仅会引起驾驶人的不适感,而且稳控系统的非正常进入将会加大相关组件的磨损,影响其使用寿命。识别稳控系统过沟坎时的信号特征,防止稳控系统在不必要的情况下误动作,是完善稳控系统可靠性、提高稳控系统舒适性的研究重点之一。图4-35所示为车辆通过某减速带的情况。可见,当通过减速带时,车轮受到冲击,轮速信号有波动,其轮加速度在短时间内振荡,出现较大的正负峰值,轮加速度值突变。
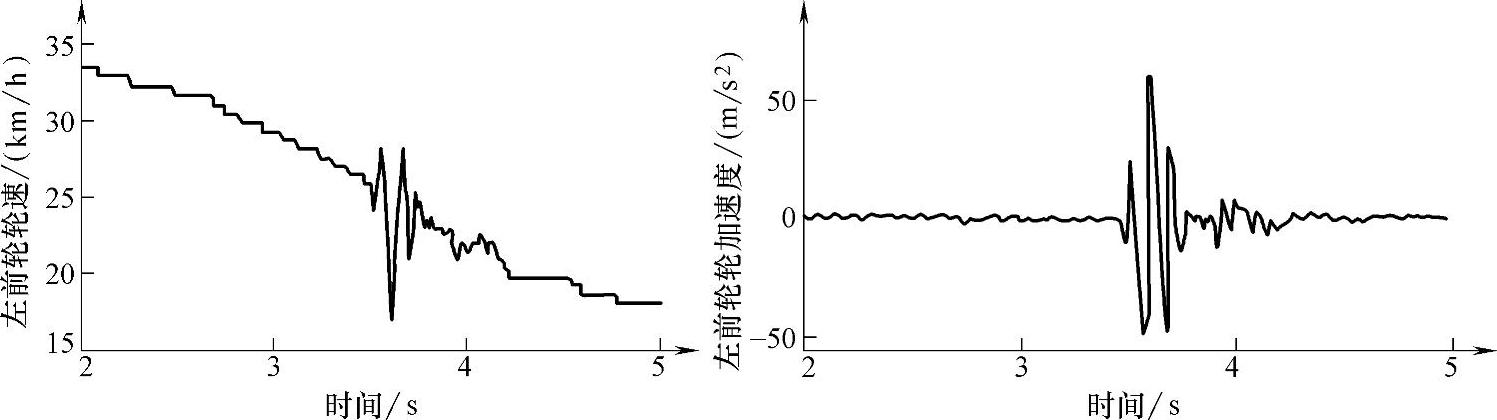
图4-35 车辆通过减速带的信号特征
稳控系统的控制算法中,稳控系统进入控制的条件是轮减速度小于“进入”减速度门限、并且滑移率大于“进入”的滑移率门限,而过沟坎时,轮速度波动较大,轮减速度和滑移率有可能同时达到“进入”稳控系统控制的门限,引起稳控系统的动作;但是稳控系统的动作不一定与驾驶人意图相符。例如驾驶人过沟坎时缓踩制动时,稳控系统动作会使踏板感觉变坏,驾驶人主观感受不好。根据图4-35所示的车辆通过沟坎时的轮加速度信号的特征,若两周期前的轮加速度在0附近,两个计算周期的时间内轮加速度突变没到设定值,可以认为车轮通过沟坎工况,强制稳控系统不进入;若上个周期的轮加速度在0附近,一个计算周期的时间内轮加速度突变到设定值以下(如-2.0g),可以认为车轮通过沟坎工况,强制稳控系统不进入;若两周期前的轮加速度是正值,上个周期的轮加速度为负值,且两个周期前的轮加速度值与本周期的轮加速度值的差大于设定值(如3.0g),可以认为车轮通过沟坎工况,强制稳控系统不进入;若上个周期的轮加速度是正值,本周期的轮加速度为负值,上周期的轮加速度值与本周期的轮加速度值的差大于设定值(如2.0g),可以认为车轮通过沟坎工况,强制稳控系统不进入;若判断为过沟坎工况,但轮减速度和参考滑移率到达稳控系统进入门限持续的时间超过设定时间,则取消强制稳控系统不进入的限制,稳控系统开始正常控制。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。