



稳控系统参考车速算法的主要要求:兼顾准确性和计算量;在硬件上最好不增加成本或增加的成本可接受;控制算法简单、可靠性高。基于以上要求,本章根据大量研究和实践,提出了双层结构的参考车速算法,如图4-8所示。
所谓双层结构是指:第一层为基础参考车速算法,根据四路轮速估计参考车速;第二层为综合参考车速算法,需要借助额外的车身加速度信号,并结合第一层得到的参考车速进行综合估计,可以获得更为精确的估计车速。
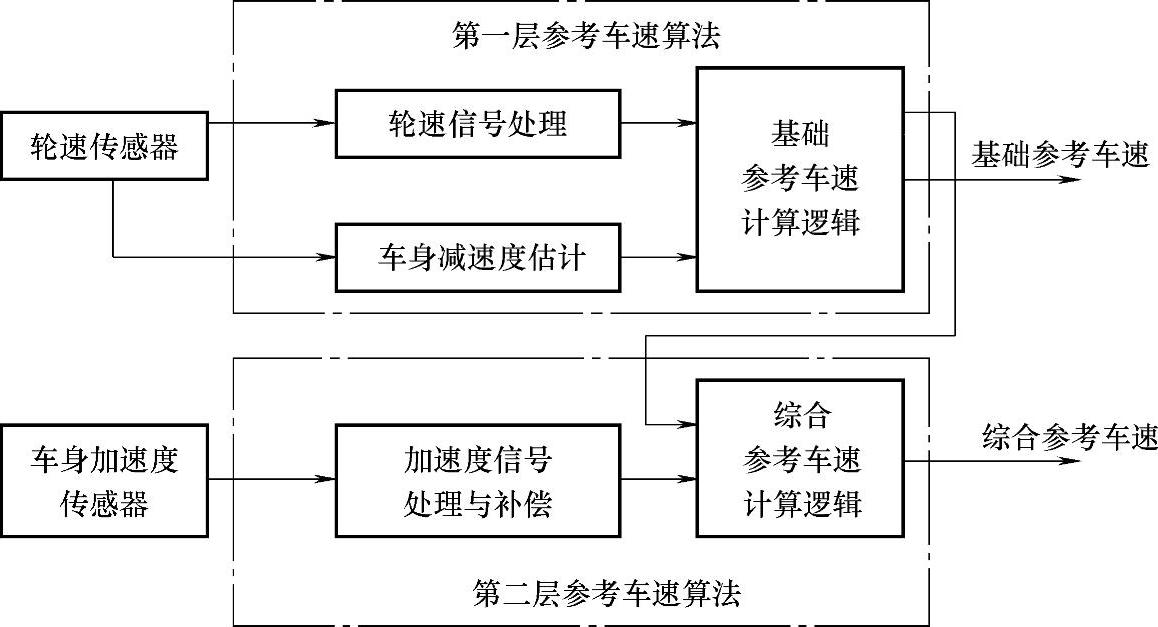
图4-8 双层结构的参考车速算法示意图
双层结构的参考车速算法的优势:第一层的基础算法相对独立,普遍性更强,在无车身加速度传感器或加速度传感器故障的情况下,可以单独用于稳控系统控制。在某些具备车身加速度传感器的稳控系统中(例如某些越野车的稳控系统产品含有加速度传感器),第二层综合算法以基础算法的结果为基础,进一步引入车身加速度信号,可以获得更精确的参考车速,从而提高稳控系统的控制质量。基础参考车速算法在传统的稳控系统硬件系统中即可实现,主要根据来自轮速传感器的四路轮速信号信息进行估算。本算法的依据是,在不制动或者制动初期,轮速变化缓慢,滑移率小,可以用轮速近似代替车速;但是当车轮有抱死趋势时,轮速和车速发生分离,以分离临界点的轮速为初值、以估计的车身减速度为斜率进行线性外插,计算得到参考车速,关键在于分享点和插值斜率的选择,得到的车速计算逻辑如图4-9所示。
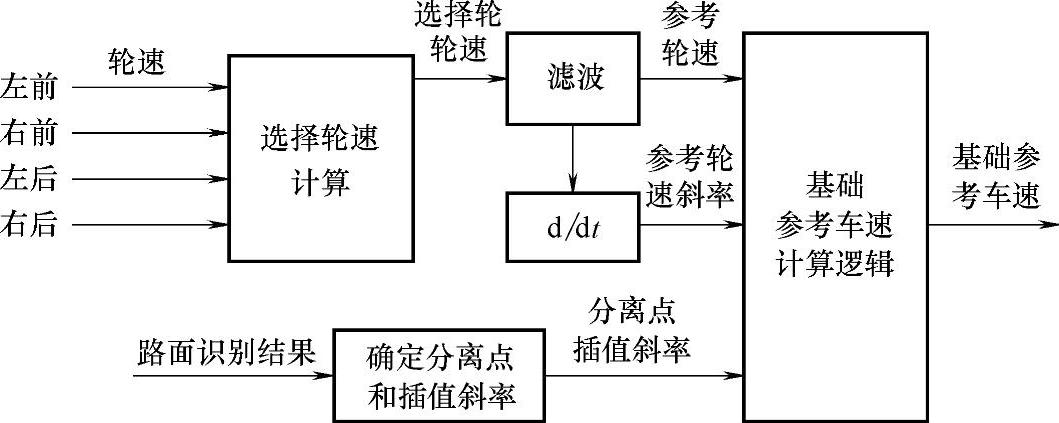
图4-9 第一层的基础参考车速计算方法
基础参考车速算法的流程:在四个车轮的速度中提取选择轮轮速信息;选择轮轮速进一步计算得到参考轮速和参考轮速斜率;根据路面识别结果确定分离点和插值斜率;通过参考轮速、参考轮速斜率、分离点和插值斜率估算参考车速。选择最接近车速的轮速,以其为基础进行分离插值计算可以提高参考车速计算的准确性。由于运动过程千变万化,最接近车速的车轮速度也是在时刻变化的,固定以某一个车轮轮速为参考车速并不合理。根据四个车轮轮速信息生成一条“虚拟”的选择轮轮速的方法,以选择轮轮速为参考车速计算。所谓“虚拟”是指选择轮轮速实际是不存在的,只是为了计算需要人为给定。制动过程中四个车轮的轮速总是小于或等于车速,最大轮速接近车速,但是当驱动的时候,驱动轮打滑,会出现驱动轮轮速大于车速的情况,此时从动轮轮速更接近实际车速。另外由于齿圈和轮速传感器的振动、电磁干扰等情况,轮速计算可能引入误差,导致车速计算偏大,超过实际车速。参考轮速及参考轮速斜率的计算方法:每个计算周期将四个轮速比较排序;稳控系统不工作时选择第三轮速,稳控系统工作时选择第二轮速,轮速滤波后得到参考轮速。在正常行驶和弱制动下,取车速等于参考轮速;在强制动情况下,当参考轮速的斜率大于路面最大制动减速度时,说明参考轮速与实际车速分离,参考轮速已经偏离实际车速,参考车速应该按照车辆减速度插值计算,如图4-10所示。
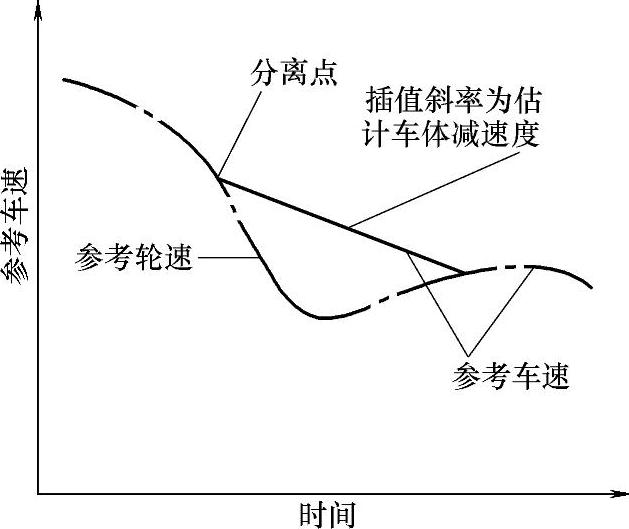
图4-10 参考车速的分离与插值
分离点和插值斜率的选择显然与路面附着情况有关,路面附着系数越低,车辆减速度越小,分离点对应的轮减速度应该越小,而且插值斜率也应该越小。因此需要根据路面识别结果估计车辆减速度,四个车轮有不同的估计路面附着系数,对应着对开、对接等路面工况,但车辆减速度只有一个。将路面简化为单一附着、对接路面、对开路面三种情况。在车辆减速度的估计中以前轮附着状况的识别结果为准,路面情况进一步简化为单一附着路面和对开路面,用两个前轮的路面识别结果为准进行车辆减速度的估计。车辆减速度的估计见式(4-6)。

式中  ——估计的车辆减速度;(https://www.xing528.com)
——估计的车辆减速度;(https://www.xing528.com)
式中  ——估计的车辆减速度;
——估计的车辆减速度;
μfl、μfr左前轮、右前轮的路面附着识别结果。
若两个前轮都识别为高附着路面,那么车辆减速度较大;若两个前轮识别为低附着路面,车辆减速度小;若一侧为高附、一侧为低附,则车辆减速度适中。得到车辆减速度后,需要根据估计的车辆减速度进一步确定分离点和插值斜率。由于逻辑门限值方法的路面识别结果对于路面划分较为粗糙,车辆减速度的估计可能有一定的误差,计算时不能以估计的车辆减速度作为插值斜率,若误差引起估计减速度偏小使插值斜率偏小,会有计算的参考车速大于实际车速的情况发生,进而引起滑移率计算偏大、稳控系统控制减压过度、制动强度偏小的不安全情况的产生。因此,在实际稳控系统控制系统的参考车速使用中,得到的参考车速小于实际车速,以保证安全性,在分离点和插值斜率的选取上偏保守,即选取的插值斜率一般大于估计的车辆减速度。根据实车标定选用的分离点和插值斜率与估计的车辆减速度的关系如图4-11所示。
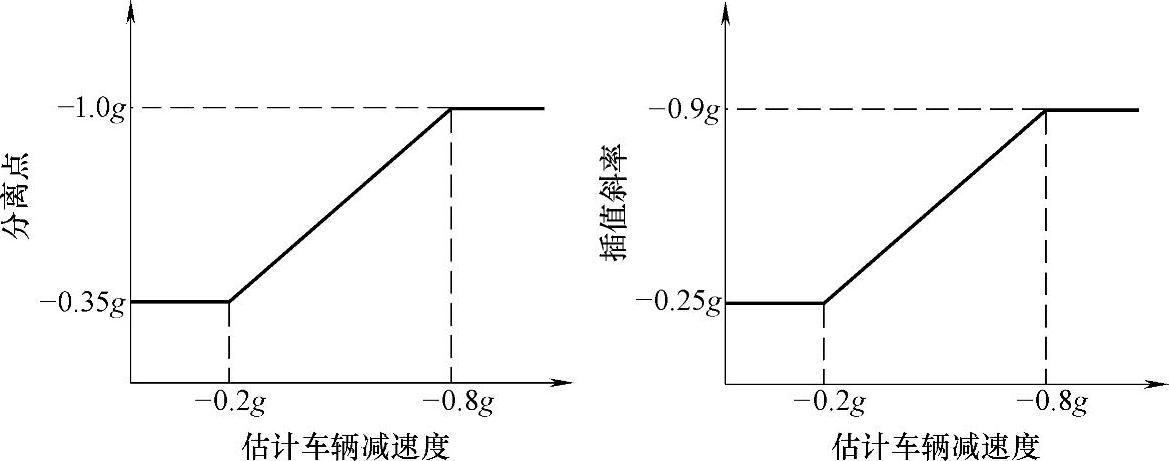
图4-11 分离点、插值斜率与估计的车辆减速度的关系
按照上述算法得到了参考轮速、参考轮速斜率、分离点和插值斜率,然后可以进一步计算参考车速,具体算法:参考车速计算开始时,首先令参考车速等于参考轮速;每周期实时监控参考轮速斜率,当参考轮速斜率小于分离点时,参考车速由插值得到;参考车速持续插值,直到参考轮速再次大于参考车速时,插值结束,令参考车速等于参考轮速,计算流程再次从头开始。按照计算选择轮轮速、参考轮速、估计车辆减速度、确定分离点和插值斜率的方法得到了基础参考车速。为了验证基础参考车速算法,将上述算法编程转化为控制程序编译后下载到控制器中,进行实车实验,并将控制器实时计算的参考车速和轮速信息通过串口发送到上位机,采样周期为10ms;同时通过五轮仪采集实际车速作为对比。以部分实车数据为例进行说明。图4-12所示为车辆在高附着路面上进行稳控系统制动的情况,初速为60km/h,控制器中实时计算的参考车速和对比的实际车速如图4-12所示。由图4-12可见,参考车速略小于实际车速,可以满足稳控系统控制需要。
图4-13所示为车辆在对接路面(由低附着跃变到高附着)进行制动时的基础参考车速计算情况。可见基础参考车速略小于实际车速,但与实际车速基本吻合,能够满足稳控系统控制需要。通过以上分析得到了通过四个车轮轮速估计车速的基础参考车速算法,该算法特点:能够较为准确地计算出参考车速,同时能够保证稳控系统控制的安全性;算法简单,计算量小,适于稳控系统实时控制需要;不需要增加任何硬件成本;该算法也为进一步通过车身加速度传感器信号进行车速估计打下了基础。
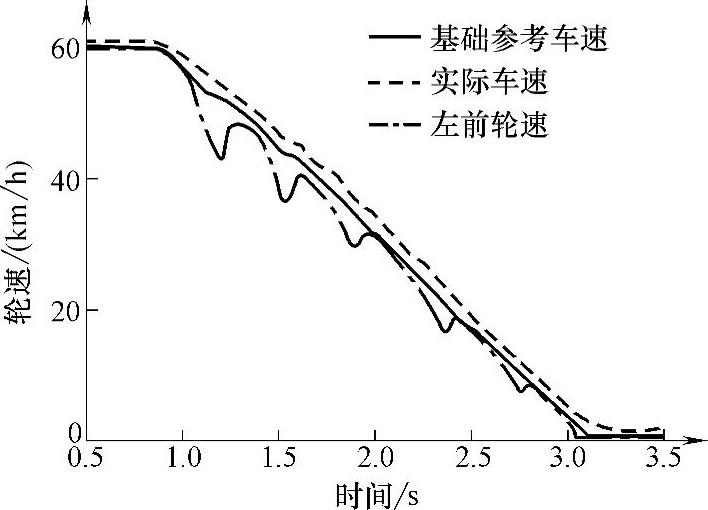
图4-12 高附着路面上制动时的基础参考车速计算
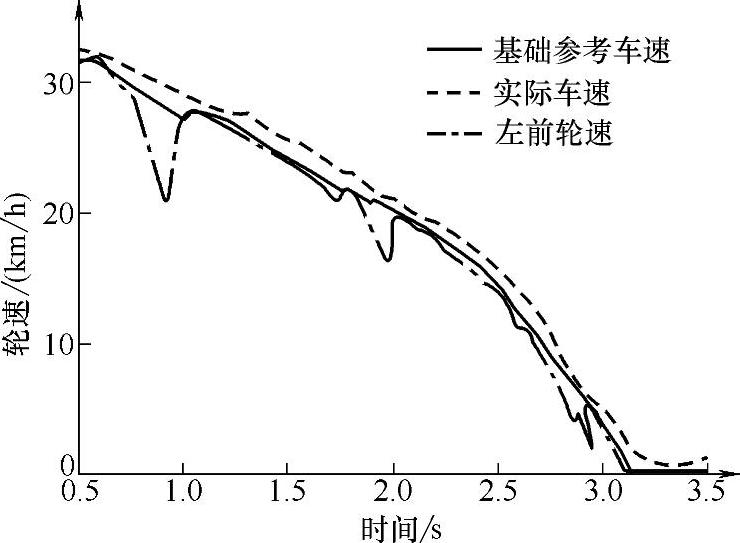
图4-13 对接路面制动的基础参考车速计算
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。