



车辆行驶过程时变性强,受外界条件影响大及非线性明显,要求车辆稳控系统对各种路面具有广泛适应性,并要求其反应速度要快。除硬件的因素,控制软件是稳控系统满足车辆性能要求的关键。控制软件主要是指稳控系统算法,即控制逻辑和方法,包含路面附着特性识别、瞬时车速辨识。
控制算法模型
稳控系统控制算法包括控制逻辑和控制方法,采用耗散功率和逻辑门限值相结合的控制方法;实际路面情况是比较复杂的,控制逻辑须能及时识别出路面状况,并采取相应的措施。实际路面可大致粗略地分为高附着系数路面和低附着系数路面,这两种路面又可分为平坦和颠簸路面。它们的峰值、滑动附着系数及对应滑移率均有很大区别。开发的稳控系统控制软件可以很好地识别各种不同附着系数的单一路面和变工况的路面,主要包括高附着系数路面、低附着系数路面、对开路面、对接路面和颠簸路面。滑移率作为稳控系统控制中的门限值,在控制逻辑中起着重要的作用。为了计算滑移率,就必须知道瞬时车速的大小,而在实际上,瞬时车速是很难测到的。虽然可以用非接触速度传感器或加速度传感器测出车辆减速度,然后计算出车速,但是采用非接触速度传感器成本高、技术复杂,采用加速度传感器会受到道路坡度的影响,误差较大,这两种方法都缺乏实用性。因此,通过从轮速传感器得到车轮的角速度和角减速度信息,通过G传感器得到车辆的加速度信息,采用相应算法,得到参考车速,进而得到参考滑移率,在软件中进行平滑处理。主CPU担负着全部的稳控系统控制工作和一部分系统监测功能,同从CPU进行通信。将单片机控制软件中处理底层基本操作的部分划分出来,按照实时操作系统的要求单独进行设计,这样可以简化工作且方便修改,有利于软件的复用。
现有的实时操作系统分成两类:第一类为小且专用的核,这类RTOS的体积轻巧,适合于嵌入式的实时系统,它可以实现多任务及任务间的通信。第二类为对商业操作系统进行扩充所形成的RTOS,这类RTOS是对已有的商业操作系统进行实时部分的扩充所形成的,由于它们是以一些人们已熟悉的用户接口为基础建立起来的,这便加速了应用开发过程,并且增加了可移植性,所以,它们的功能比较强大而且提供了较好的软件开发环境。但是,与第一类RTOS相比,这类RTOS的响应速度比较慢,适合于软实时系统及简单的硬实时系统。显然对于在单片机上实现的稳控系统控制软件应该选用第一类内核,操作系统需要解决的问题主要是资源分配。由于所设计的单片机控制系统处理的问题比较单一,内存和端口等资源不必由操作系统动态分配,也不需要设计文件系统,故此核心的问题是进程的管理和调度,即CPU时间的分配。
主CPU需要执行的任务分为三类:实时级任务的特点是随机发生,而一旦发生就要求立即得到系统的响应。这类任务包括轮速信号中断的处理、定时中断处理、系统调度。定时级任务的特点是有规律地定时发生,而且一定要保证准时执行任务。这类任务有稳控系统控制主程序。及时级任务的特点是对定时要求不高,可以在系统空闲的时候进行。它只要求在某一时间段内完成即可。这类任务包括在线自检、与从CPU的通信等。以上三类任务的优先级依次降低。优先级最高的实时级任务由中断实现。为了保证系统效率,对实时级的程序进行了细致的优化,只有必须实时完成的工作才容许放在实时级。在实时级任务执行中,一律禁止中断发生,从而避免了实时级任务的复杂嵌套和同步互斥关系的处理;由于实时级的任务执行时间极短,主CPU有类似中断队列的硬件机构,而且在轮速处理电路中设置滤波截止频率,实时级进程相互争夺CPU时间不会构成问题。进程调度程序放在定时中断中,当预定时间到达时,进程调度程序调入需要执行的定时级任务,从而保证了定时级任务的准时启动。根据稳控系统控制的特点,所有的定时级任务都要求在一个稳控系统控制循环中完成。
当系统启动时,CPU首先进行自检。自检的内容分CPU子系统的自检和外围设备的检查两部分。CPU子系统的检查主要是对ROM和RAM的检查。对ROM的检查采用校验和检验的方式。对RAM的检验可以采用写入某数再读出比较的方式。对外围设备的检验也是自检过程的重点。(https://www.xing528.com)
在系统的运行过程中还需要进行在线自检以进一步提高可靠性,在在线自检中,对稳控系统的各个部件进行非常全面的检测,如电磁阀的短路、断路,轮速传感器的短路、断路、虚接,齿圈缺损等。如果发现该类错误则停止稳控系统工作,并保存故障码。根据前面对进程管理的介绍,可知如果定时中断不能发生,则定时级和及时级的任务都无法被启动。为此,设计了一个软件定时器来解决这一问题。当所有的及时级的任务都完成后,开始执行定时器程序,它是一个循环延时程序。如果定时中断能够正常发生,则定时器程序被中断,不会发生作用;如果定时中断不能正常发生,定时器程序在完成延时过程后强行进行热启动。以上这些防错措施显著提高了控制软件的可靠性,从而也就提高了整个稳控系统的可靠性。轮速信号传感回路是弱电系统,容易受外界强电磁的干扰;而且车辆运行过程中轮速检测装置也容易发生振动。这些都有可能导致轮速虚假信号的产生,这种虚假信号与正常信号叠加在一起,由于它们频率相近,使用硬件的手段很难滤掉,在算法设计上用传统的巴特沃斯、贝塞尔等数字滤波技术也无法消除虚假信号造成的影响。在软件编制过程中,根据虚假信号的特点设计了轮速信号异点剔除的预处理方法,这种异点剔除的预处理方法能有效地消除虚假信号,并且有计算量小,易于实现的优点。在软件编制过程中,对计算速度进行了优化,对软件的复用性做了认真的考虑等。图2-13、图2-14所示是软件简要流程图。

图2-13 主CPU控制流程图
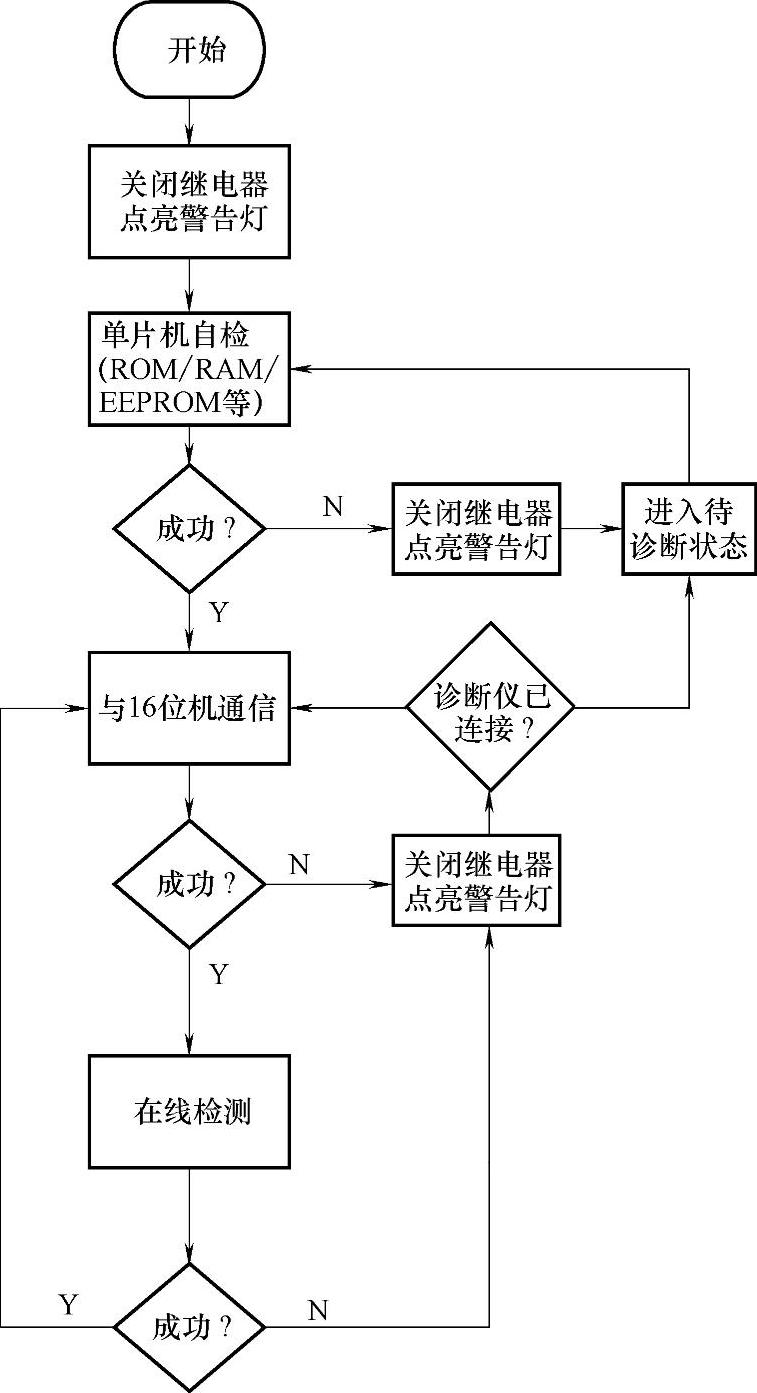
图2-14 从CPU控制流程图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。