



车辆作为典型的机电系统,其模型是研究该系统的有效工具。为了对车辆稳控系统进行分析,搭建稳控系统仿真平台可为控制算法评价、调试、标定匹配和性能分析等提供良好的环境。稳控系统仿真平台是稳控系统控制方法和算法的基础,仿真平台由驾驶人模型、车辆动力学模型、轮胎模型、路面模型、制动系统模型、ECU模型和HCU模型等组成。图2-7所示为稳控系统仿真平台示意图。
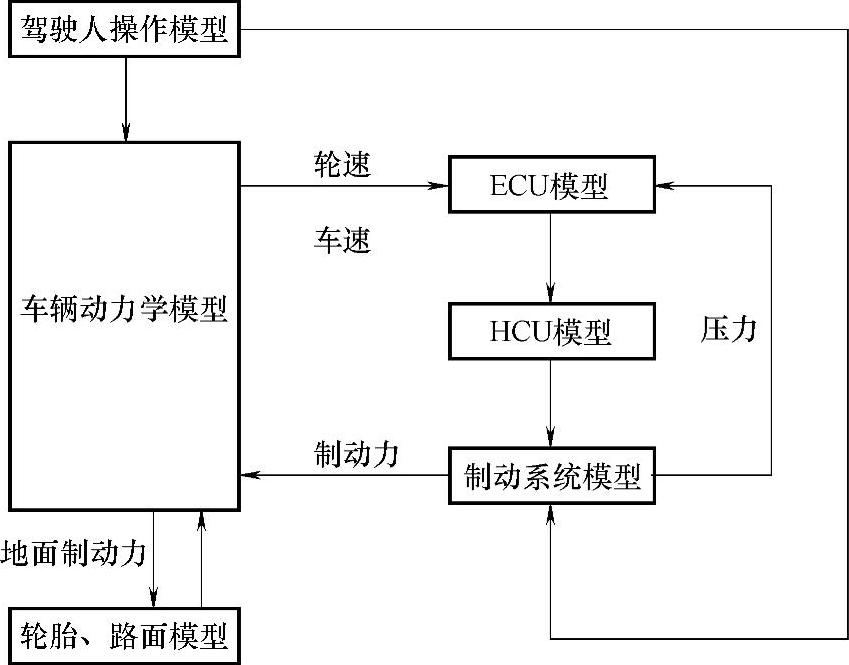
图2-7 稳控系统仿真平台模型
在仿真平台中,驾驶人操作模型优先级最高,车辆的运行状态响应驾驶人的操作意图,根据驾驶人操作可以仿真不同的稳控系统制动工况。车辆的运动依赖于轮胎所受的力,如纵向力和侧向力等,轮胎、路面模型是车辆运动的基础,稳控系统仿真中的各种路面附着工况,如高附着路面制动、低附着路面制动、对接路面制动以及对开路面制动等,就是依靠轮胎、路面模型的合理设计来完成的。车辆动力学模型是研究稳控系统的载体,车辆动力学模型根据驾驶人操作、稳控系统控制的制动压力、地面的纵向力/侧向力等计算车辆的状态,如车身状态、车轮状态等。ECU模型可以用不同的控制方法来实现,如逻辑门限值方法、PID控制方法、模糊控制方法等,从而可以对控制方法和控制算法进行研究;在HCU模型和制动系统模型上可以进行制动压力动态特性的分析。以上各部分模型各自独立又相互关联,组合在一起构成了稳控系统仿真平台。为适用不同的稳控系统仿真目的,本章分别建立了2自由度和7自由度车辆动力学模型,如图2-8、图2-9所示。车辆动力学模型是典型的连续时间系统,可以用微分方程来描述。2自由度车辆动力学模型也称为1/4车辆制动模型或单轮模型,共有2个自由度,即沿X方向的平动和车轮的转动。

式中 m——车辆质量;
J——车轮转动惯量;
ω——车轮加速度;
μx——地面附着系数;
r——车轮半径;
Tμ——制动力矩;
u——车速。
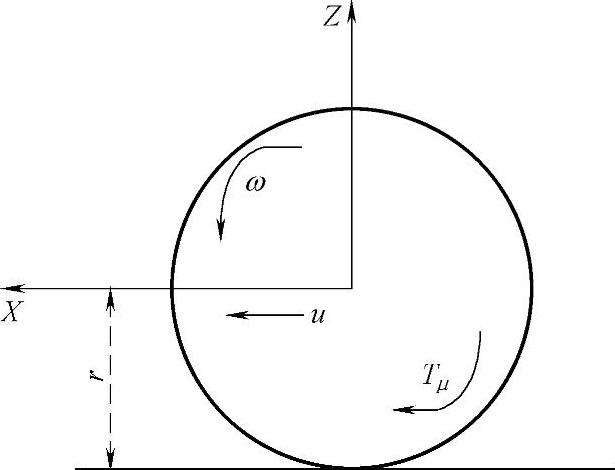
图2-8 2自由度汽车模型
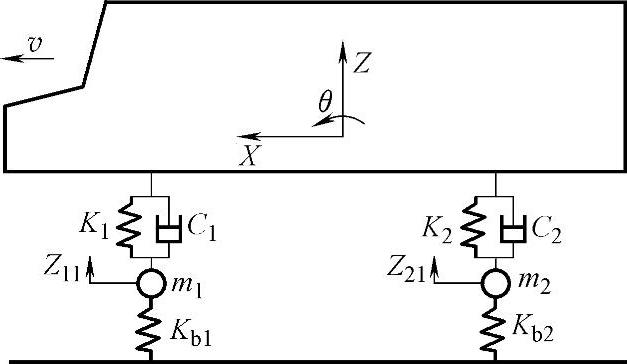
图2-9 7自由度汽车模型
1/4车辆制动模型只考虑了车辆的平动和车轮的转动,是研究稳控系统最简单的模型,它可以反映最基本的受力、运动和滑移率的关系,可以对控制方法进行原理的分析和设计。
采用2自由度车辆模型,考虑到大侧向加速度时的非线性,系统状态参量及观测量为

式中,x为系统状态参量,u为输入量,y为观测量,A为状态矩阵,B为控制矩阵,C为输出矩阵,D为传递矩阵。
7自由度车辆动力学模型,也可称为1/2车辆制动力模型或双轮模型。其包括7个自由度:整车的前进方向运动自由度X,垂直运动自由度Z和俯仰运动自由度θ;前轮垂直运动自由度Z11和旋转运动自由度ω11;后轮垂直运动自由度Z21和旋转运动自由度ω21。
运动方程为
整车前进方向运动方程
 (https://www.xing528.com)
(https://www.xing528.com)
车身垂直方向运动方程

车身俯仰运动方程

前轮垂直运动方程

后轮垂直运动方程

前轮旋转运动方程

后轮旋转运动方程

轮胎的纵向力

悬架所受的力

7自由度的1/2车辆制动模型可用于直线制动过程中稳控系统的控制仿真,它考虑了汽车制动过程中的载荷在前后轮上的转移,比单轮模型更加符合实际工况。相关参数说明见表2-1。
表2-17 自由度车辆动力学模型参数说明
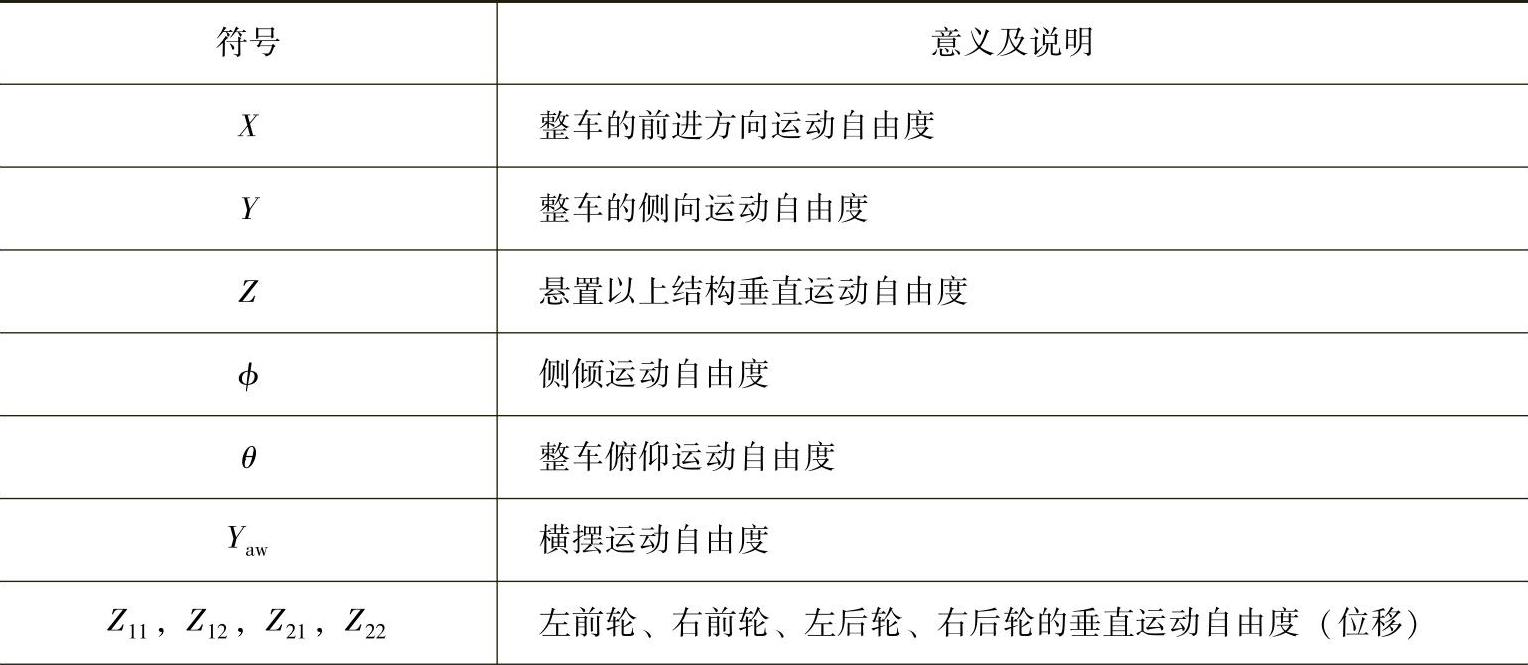
(续)
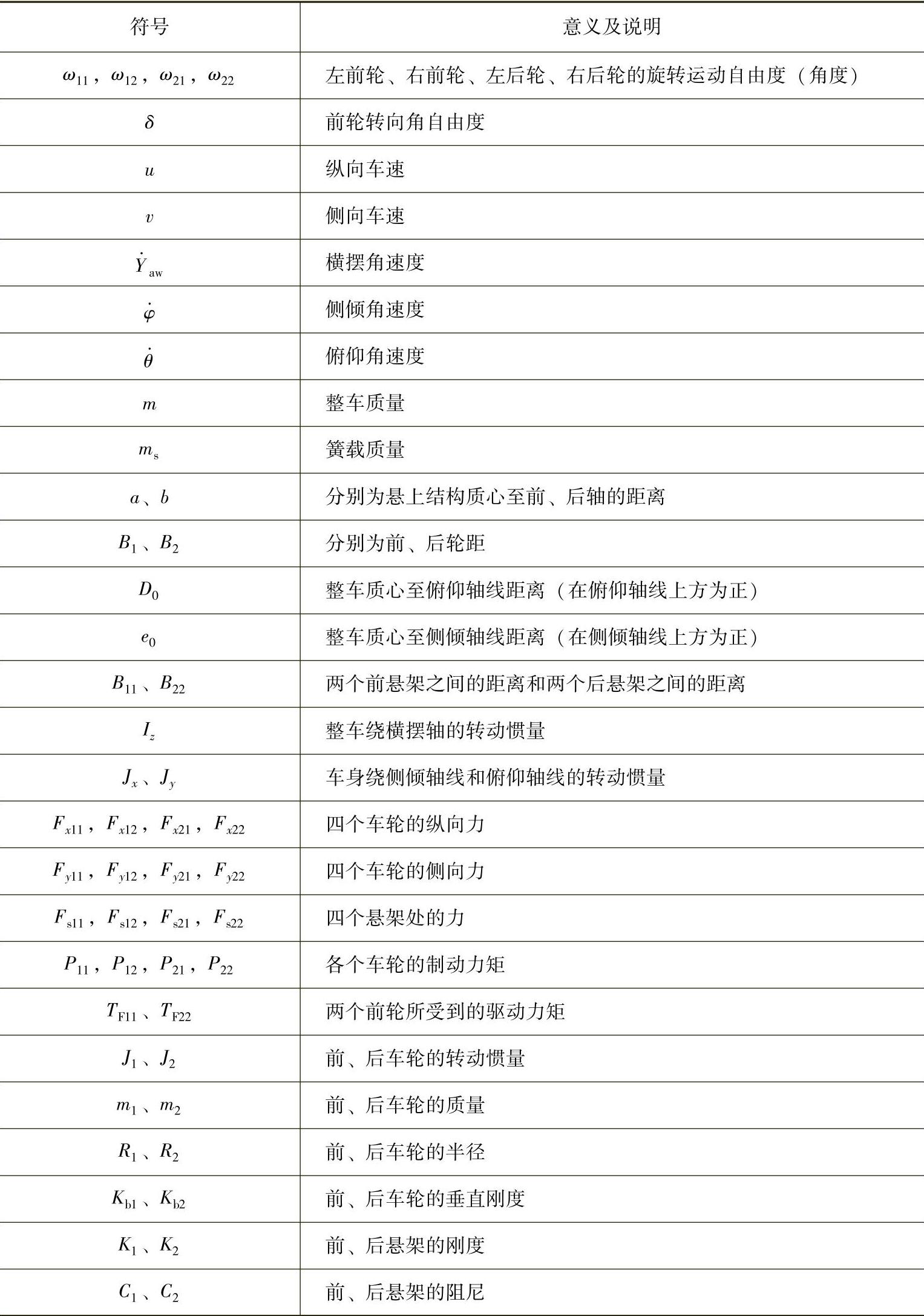
轮胎纵侧向力Fx11,Fx12,Fx21,Fx22、Fy11,Fy12,Fy21,Fy22,需要利用轮胎模型进行计算,转向角自由度的方程需要根据实际仿真情况给出,如阶跃输入、正弦输入或实车测试值输入等。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。