



控制是工程高科技领域之一,控制应用于工程的发展经历了经验(凭经验传承判断)、分析、综合(系统优化设计)和控制四个阶段。控制系统的基本元素为传感器、处理器(也称控制器)和执行器。传感器感受外部激励及系统反应的变化信息,处理器接受这些信息并依据算法设计控制策略,执行器则产生所需的控制策略并作用到系统上,从而实现对系统的控制。
依据控制调整方式的不同,控制还可分为开环控制(仅由外界荷载变化调整,被动控制多为此种控制)、闭环控制(即反馈控制,依据系统当前反应值和估计值调整)、开闭环控制(能同时感受外界荷载和系统反应的变化理想地控制,但工程实现困难)。随着系统控制应用的逐步推广,各种新的控制技术不断出现,可供选择的控制装置也越来越多,控制理论研究也不断深入。综合多学科知识建立受控系统的方程,应用并发展新的理论。通过解析、数值和实验相互支持的方法,在计算机支持的虚拟或现实的环境下完成系统设计方案论证和具体的控制设计。根据不同外界荷载变化和系统响应信息,调节控制作用,使系统性态满足安全和功能的要求。控制在早期作为从牛顿、拉格朗日、哈密顿等人发展起来的一门基础学科,但随着科学与工程技术的迅速发展,控制学科中的各个分支学科在理论和方法上相互依赖、相互渗透和相互贯通,如今已发展成为一门重要的技术科学。
依据是否需要外界能源,控制可分为被动控制、主动控制、半主动控制和混合控制四类。被动控制也称无源控制,它不需要外部输入能量,仅通过控制系统改变系统的动力特性达到减轻动力响应的目的;主动控制的过程依赖于外界激励和系统响应信息,并需要外部输入能量,提供控制策略;半主动控制利用系统响应或外界激励信息,但仅需要输入少量能量以改变控制系统形态,达到改变系统动力特性从而减轻响应的目的;混合控制指的是上述三类控制的混合应用,在系统上同时施加主动和被动控制,整体分析其响应,克服纯被动控制的应用局限,减小外部控制设备的功率、体积、能源和维护费用,增加系统的可靠性。
被动控制是一种无源控制方法,包括隔振、吸振和耗能三大控制形式,采用隔离、转移、消耗能量的方法达到系统稳定目标。被动控制易于工程实现,受到普遍重视。车辆多采用隔振装置,如高阻尼橡胶系统、滞变-摩擦系统等。车辆隔振模型如图1-3所示。

图1-3 车辆隔振模型
车辆系统增加了基底隔振层后,n个自由度的系统变为n+1个自由度,如图1-4所示。其运动方程为

式中,m0、c0和k0分别为基底隔振层的质量、粘滞阻尼系数和侧移刚度。M、C和K分别为车辆系统的质量、阻尼和刚度矩阵。由于系统和基底在阻尼项与刚度项上的耦合,使传给系统的加速度明显减小。从上式出发,可讨论隔振支座设计和车辆系统的隔振性能。
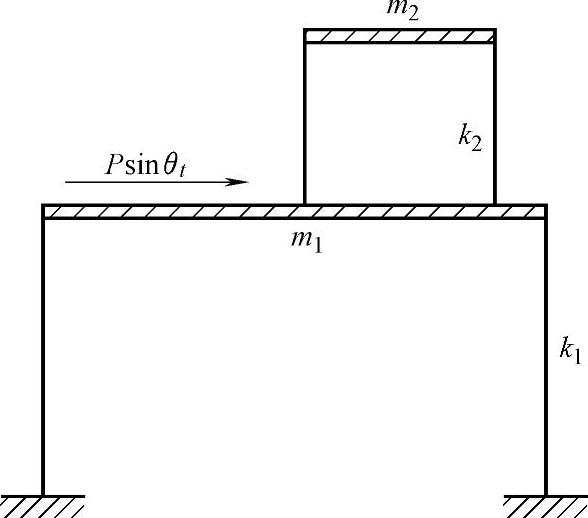
在系统上附加吸振器子系统,用以减小主系统的振动。吸振器是包括质量系和弹簧系的振动系统,以质量产生的惯性力作为控制力,通过弹簧作用于主系统,与粘滞阻尼器联合使用,并以阻尼器命名。吸振器原理可用两自由度的、底层横梁上受简谐荷载作用的剪切型框架系统的受迫振动来说明,如图1-5所示。系统稳态振动响应(振幅)为
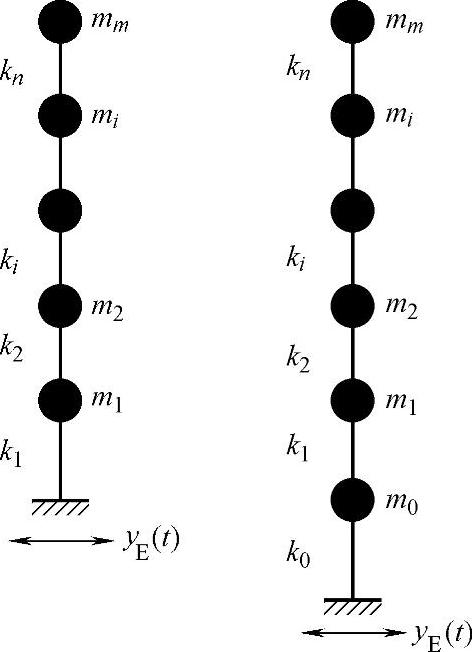
图1-4 隔振计算简图
 (https://www.xing528.com)
(https://www.xing528.com)
图1-5 吸振器原理

式中, 。可见,当k2/m2=θ2时,系统质量m1的位移为零,则吸振器质量m2的位移幅值为Y2=-P/k2。若在系统上安装吸振器,使其频率接近干扰力频率,可消除或减小系统m1的振动,从而保证系统的安全。
。可见,当k2/m2=θ2时,系统质量m1的位移为零,则吸振器质量m2的位移幅值为Y2=-P/k2。若在系统上安装吸振器,使其频率接近干扰力频率,可消除或减小系统m1的振动,从而保证系统的安全。
质量为固体的有被动调谐质量阻尼器、摆式质量阻尼器等,质量为液体的有调谐液体阻尼器、液压阻尼系统、质量泵等。质量泵利用液体振荡改变系统质量分布。质量系可以同时包括固体和液体,如液压质量控制系统,多安装于系统底层,可以降低50%~70%的振动,增加3~4倍的阻尼。利用各种阻尼元件、吸能部件或摩擦支撑产生的阻尼力、塑性变形或摩擦力来衰减系统在外界干扰下的振动响应,具有耗能能力强、低周疲劳性能好的特点。在系统上安装耗能装置后,将使系统刚度、阻尼发生改变。
车辆耗能器主要有两类:一类是与速度相关的粘弹型阻尼器;另一类是与材料损失、能量耗散相关的摩擦耗能器。摩擦耗能器主要利用器件间的摩擦耗散能量。将摩擦耗能器安装在支撑上,即成为摩擦耗能支撑。其典型装置如图1-6所示,具有耗能能力强、效果稳定等特点。车辆典型摩擦耗能器如图1-7所示。
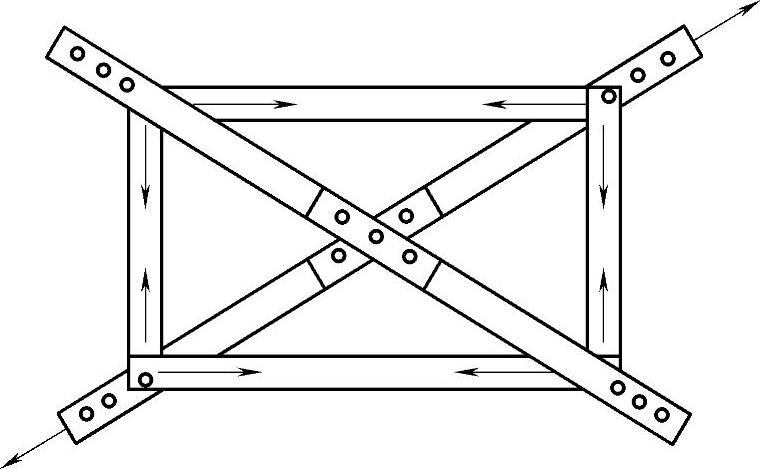
图1-6 摩擦耗能支撑

图1-7 车辆典型摩擦耗能器
主动或半主动控制是主动的智能化控制,它根据外界激励和系统响应预估所需的控制力,从而输入能量驱使执行器施加控制力或调节控制器性能参数,达到稳定控制效果。主动控制包括控制的目标函数、控制器设计和施加控制力的方法等。随着信息、控制技术的发展,主动控制技术有了长足的进步,一些控制方法和相应系统正日趋成熟,并开始在机械和车辆领域得到了成功的应用。主动控制根据控制策略是否依赖系统响应或外界激励可分为闭环控制、开环控制和开闭环控制,目前工程应用较多的是闭环控制。三类主动控制系统逻辑框图如图1-8所示。
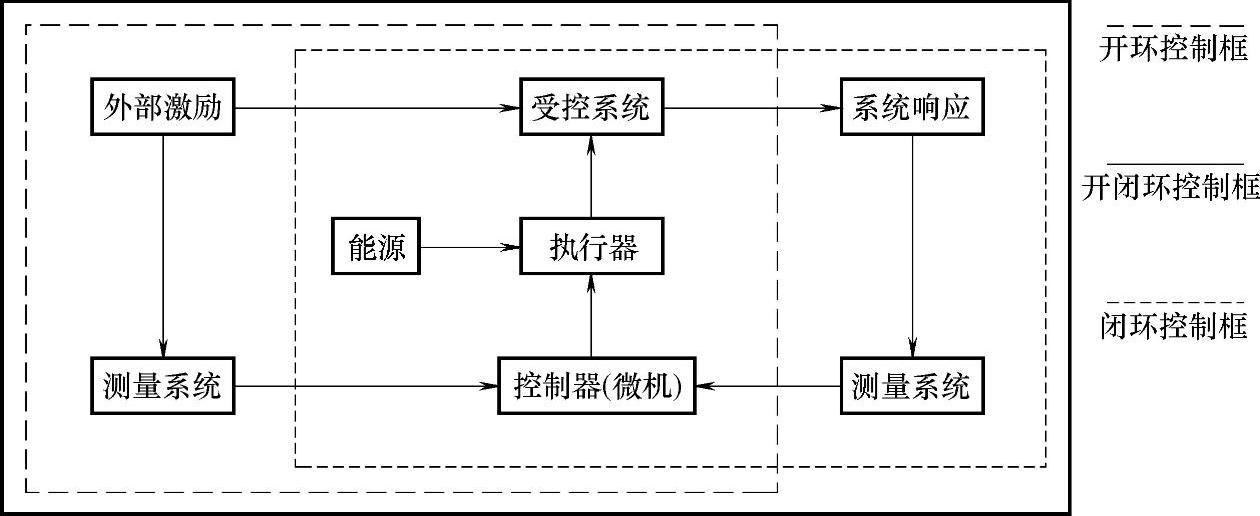
图1-8 主动控制系统逻辑框图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。