



本书的研究对象为增程式电动轿车。因此,本书针对一辆A00级的小轿车设计了增程式动力总成系统,其系统结构如图1-2所示。与串联式混合动力类似,该动力总成系统主要由驱动电机、动力电池、发电机、发动机和减速器等组成,驱动电机通过减速器直接驱动车轮,而发动机和发电机组成APU系统为整车提供动力电池之外的能量需求。整车动力总成系统采用了模块化的设计思想,即所有零部件和外界通过标准的通信接口以及标准的电气接口进行交互。APU系统作为整车的独立子系统,相当于一个独立的零部件。因此,整车动力总成系统相当于一个串联混合动力平台,无论APU系统是燃油发电机组、天然气发电机组还是燃料电池,只要满足标准的通信接口和电气接口,都可以用于该串联混合动力平台。
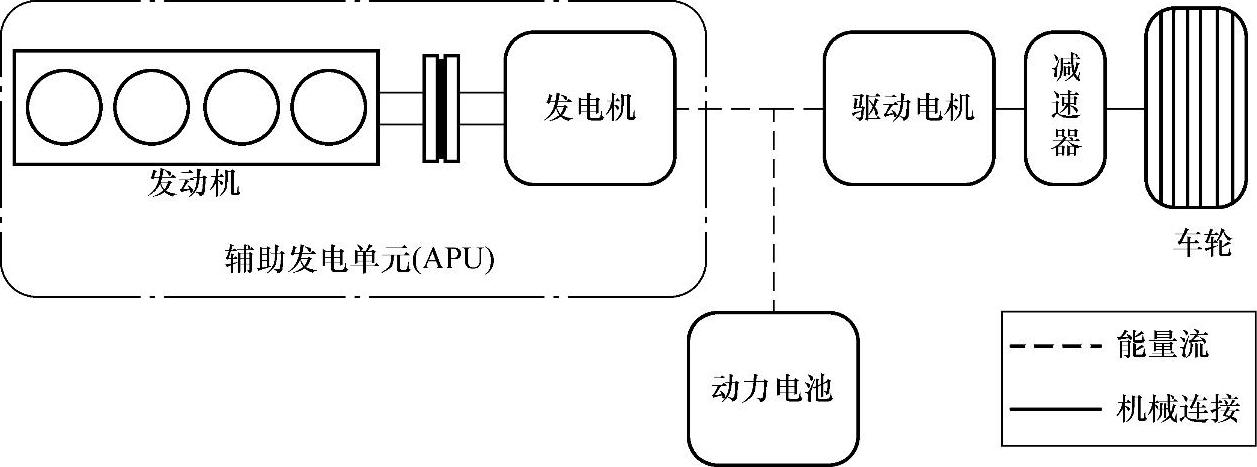
图1-2 增程式电动汽车动力总成结构
图1-3所示为奇瑞增程式电动汽车动力总成前舱总体布置方案,发电机组布置采用奇瑞272发动机和8kW发电机同轴布置方案,法兰盘2把两缸发动机1和发电机3连接起来,组成增程器系统,永磁同步电机作为电动汽车的驱动电机5,和一个固定减速比的减速器4组成电动汽车的集成式动力总成。
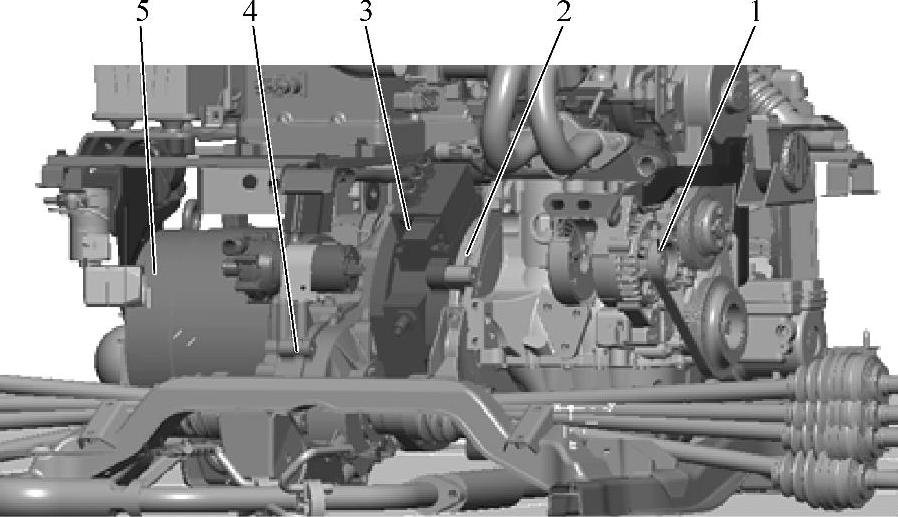
图1-3 增程式电动汽车动力总成前舱布置方案
1—发动机 2—法兰盘 3—发电机 4—减速器 5—驱动电机
整车可以实现纯电动和增程工作模式,无论是纯电动工作模式还是增程工作模式,都是由驱动电机完成对整车的驱动:纯电动工作模式时,由动力电池包通过逆变器把直流电转换为交流电来驱动电机,由驱动电机5完成对整车的驱动;当动力电池的电量较低或耗完时可以打开发动机1,整车进入增程模式,此时发动机1带动发电机3发电,电能可以带动驱动电机5工作或给动力电池包充电。
增程式电动汽车可根据不同的运行工况灵活转换其工作模式。具体而言,增程式电动汽车有4种运行模式:纯电动模式、并行驱动模式、行车发电模式和制动能量回收模式,如图1-4所示。(https://www.xing528.com)
(1)纯电动(EV)模式:在动力电池容量允许范围内运行纯电动(EV)模式,车辆行驶时,APU不参与工作,车辆消耗能量全部来源于动力电池组,电池组电量不断消耗,SOC值不断减小,同时也达到零排放。
(2)并行驱动模式:当电池SOC值不断减小不足以单独驱动车辆行驶时,APU起动工作,提供功率需求不足的部分,运行并行驱动模式。
(3)行车发电模式:此模式下,APU单独驱动车辆行驶,并且发动机输出功率超出整车需求部分向动力电池充电,提高了整车能量利用率和发动机工作效率。
(4)制动能量回收模式:电机制动系统利用驱动电机产生的反向力矩对制动轮施加制动力矩来实现制动。对于制动能量的回收,除了电机能够产生制动力矩外,动力电池组还需要有容纳电能的能力。同时,回收的电流也不能对电池形成较大的冲击,损害其寿命。另外,当电机参与制动时,为避免驾驶人感觉不适而产生误操作,控制制动的策略还要考虑驾驶人和乘客的制动感觉。
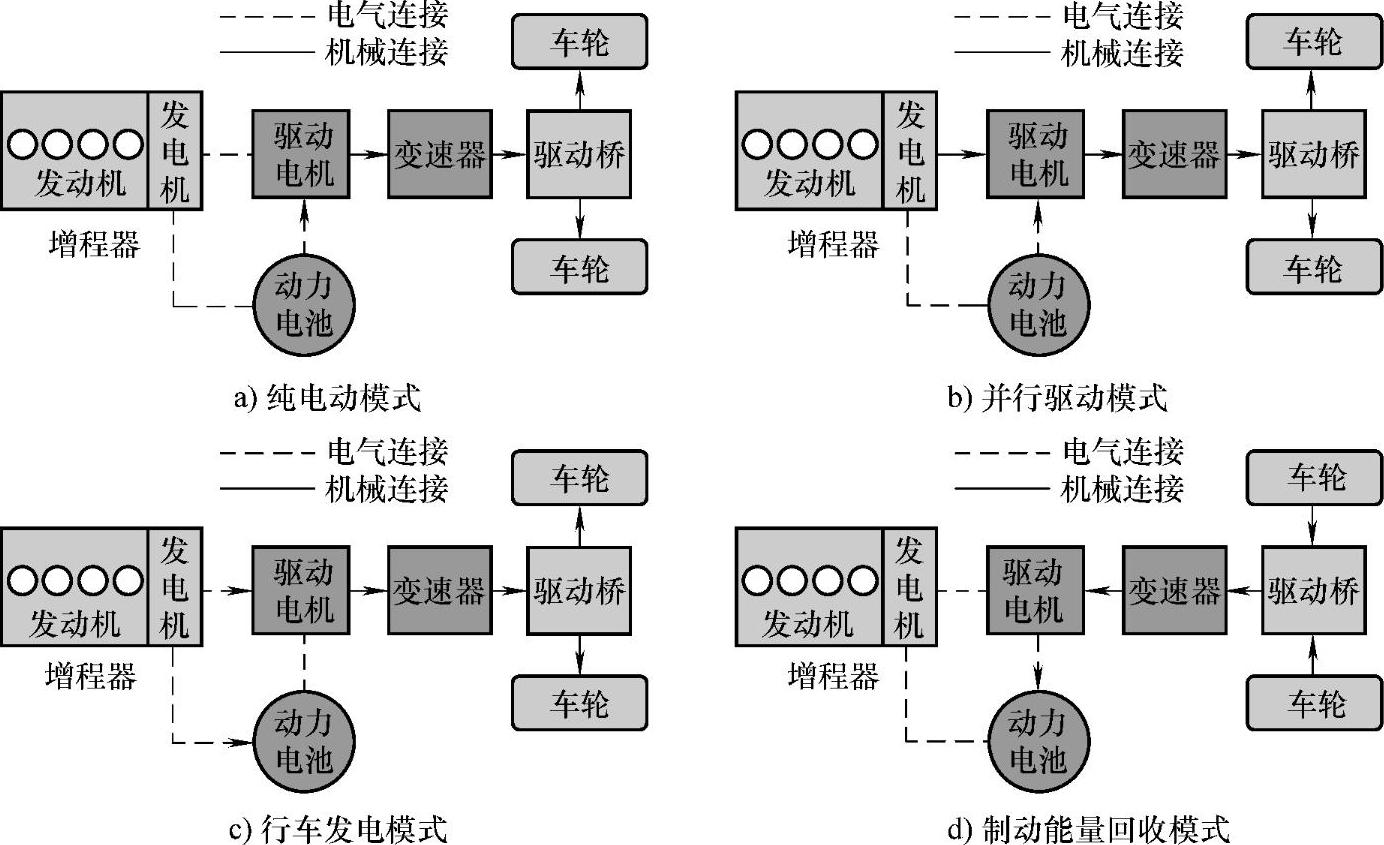
图1-4 增程式电动汽车的四种运行模式
发动机主要在并行驱动模式和行车充电模式下参与工作,并行驱动模式经常出现在中低速加速或高速行驶时,行车充电模式则主要出现在中低速平稳行驶且电池SOC值较低时[9]。而车辆中低速行驶时的空气噪声和轮胎噪声均不显著,增程器运行噪声尤为突出。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。