



导线测量是在地面上选择一系列控制点,将相邻点连成直线而构成折线形,称为导线网,如图7-1所示。在控制点上,用精密仪器依次测定所有折线的边长和转折角,根据解析几何的知识解算出各点的坐标。用导线测量方法确定的平面控制点,称为导线点。
(一)导线的布设形式
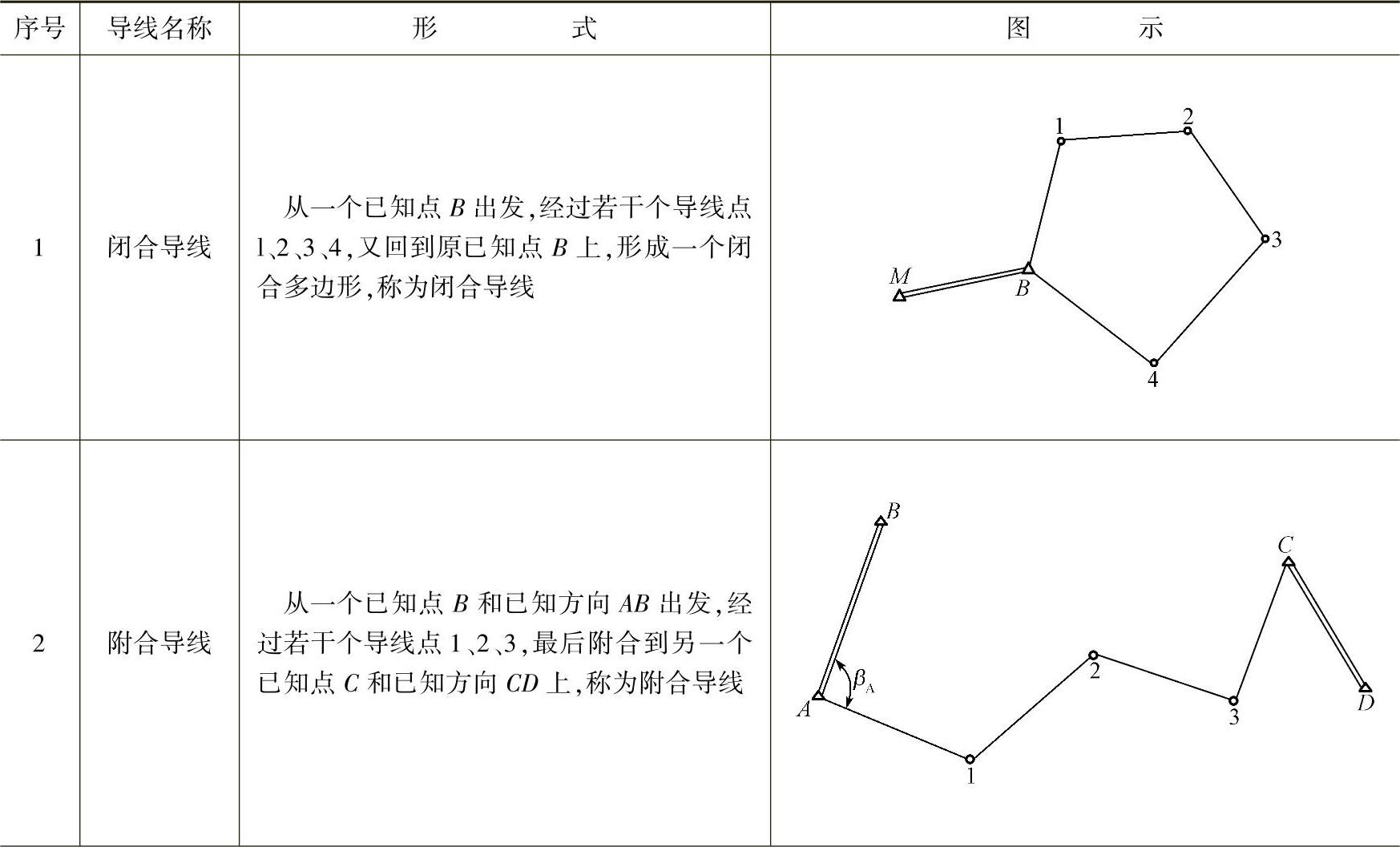
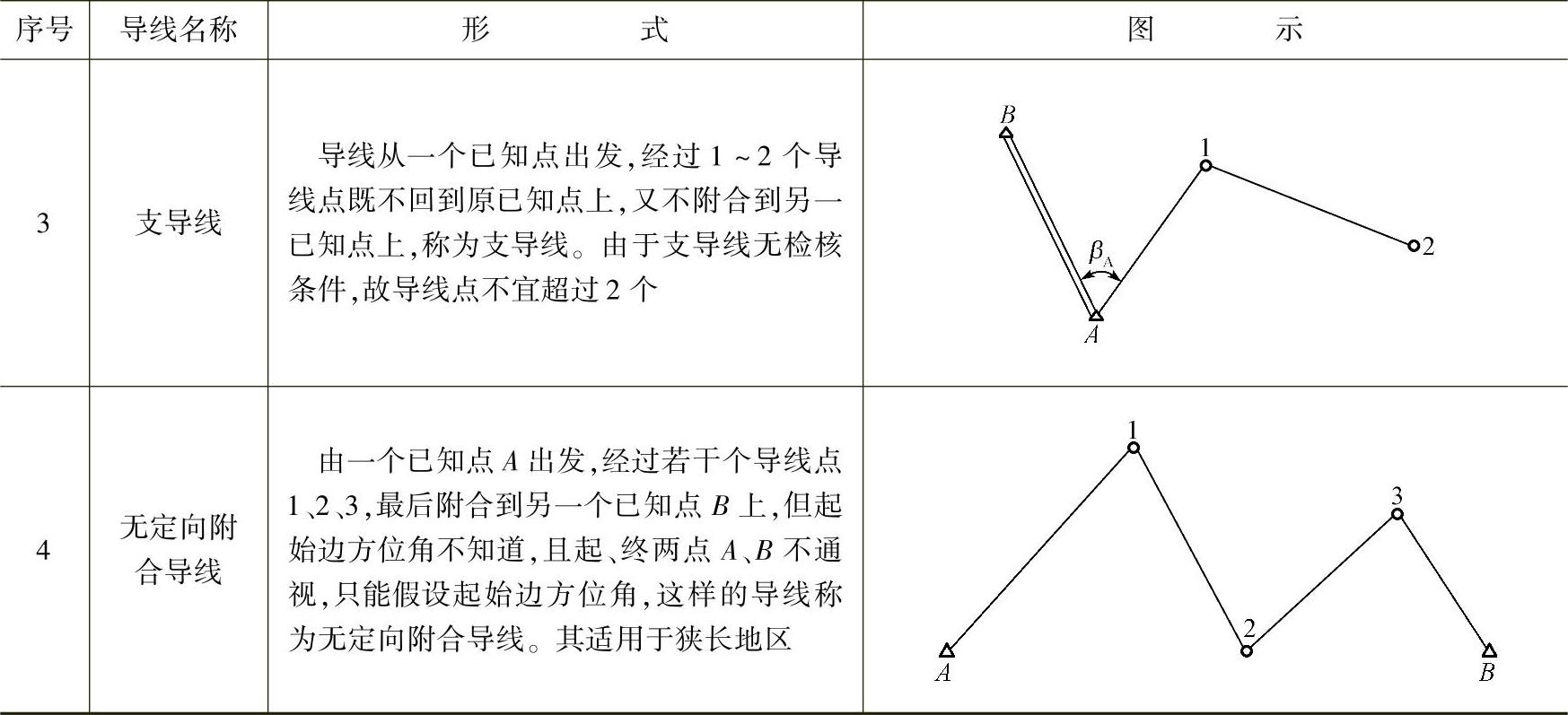
导线的布设形式见表7-3。
图7-1 导线测量
表7-3 导线的布设形式
(续)
(二)导线测量的技术要求
(1)导线测量的主要技术要求见表7-4。
表7-4 导线测量的主要技术要求
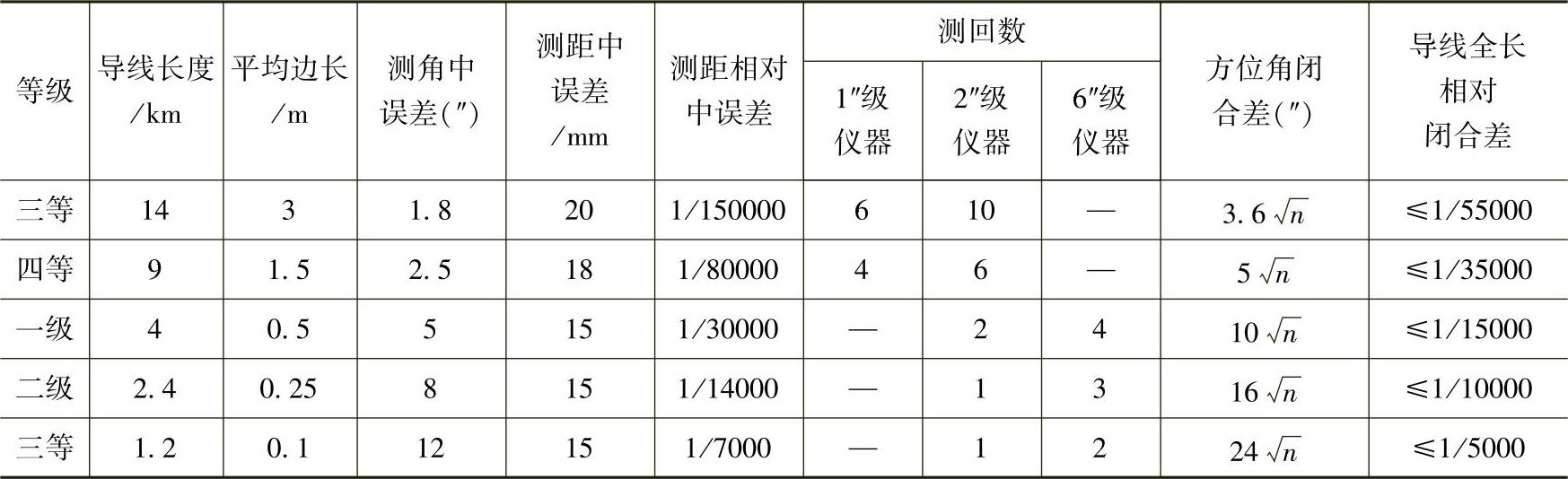
注:1.表中n为测站数。
2.当测区测图的最大比例尺为1∶1000时,一、二、三级导线的导线长度、平均边长可适当放长,但最大长度不应大于表中规定相应长度的2倍。
(2)当导线平均边长较短时,应控制导线边数不超过表7-4相应等级导线长度和平均边长算得的边数;当导线长度小于表7-4规定长度的1/3时,导线全长的绝对闭合差不应大于13cm。
(3)导线网中,结点与结点、结点与高级点之间的导线段长度不应大于表7-4中相应等级规定长度的0.7倍。
(三)导线测量的外业观测
1.踏勘选点
在去测区踏勘选点之前,先到有关部门收集原有地形图、高一级控制点的坐标和高程以及这些已知点的位置详图。在原有地形图上拟定导线网布设的初步方案,然后到实地踏勘修改并确定导线点位。
(1)导线网的布设应符合下列规定:
1)导线网用作测区的首级控制时,应布设成环形网,且宜联测两个已知方向。
2)加密网可采用单一附合导线或结点导线网形式。
3)结点间或结点与已知点间的导线段宜布设成直伸形状,相邻边长不宜相差过大,网内不同环节上的点也不宜相距过近。
(2)导线点位的选定应符合下列规定:
1)点位应选在土质坚实、稳固可靠、便于保存的地方,视野应相对开阔,便于加密、扩展和寻找。相邻点之间应通视良好,其视线距障碍物的距离,三、四等不宜小于1.5m;四等以下宜保证便于观测,以不受旁折光的影响为原则。
2)当采用电磁波测距时,相邻点之间视线应避开烟囱、散热塔、散热池等发热体及强电磁场。
3)相邻两点之间的视线倾角不宜过大。
4)充分利用旧有控制点。
5)导线点应有足够的密度,分布要均匀,便于控制整个测区。
6)导线边长应大致相等,尽量避免相邻边长相差悬殊,以保证和提高测角精度。
2.距离测量
(1)一级及以上等级控制网的边长,应采用中、短程全站仪或电磁波测距仪测距,一级以下也可采用普通钢尺量距。
(2)测距仪器的标称精度,按下式计算:
mD=a+b×D
式中 mD——测距中误差(mm);
a——标称精度中的固定误差(mm);
b——标称精度中的比例误差系数(mm/km);
D——测距长度(km)。
(3)测距仪器及相关的气象仪表应及时校验。当在高海拔地区使用空盒气压表时,宜送当地气象台(站)校准。
(4)各等级控制网边长测距的主要技术要求见表7-5。
表7-5 测距的主要技术要求
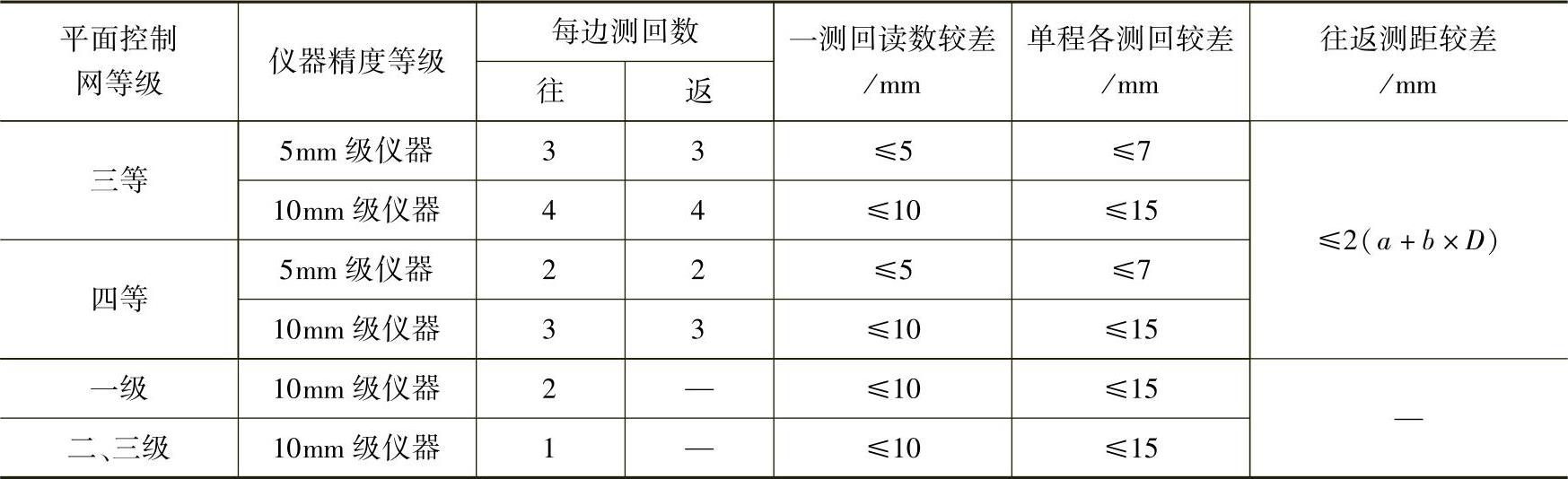
注:1.测回是指照准目标一次,读数2~4次的过程。
2.困难情况下,边长测距可采取不同时间段测量代替往返观测。
(5)测距作业,应符合下列规定:
1)测站对中误差和反光镜对中误差不应大于2mm。
2)当观测数据超限时,应重测整个测回;如观测数据出现分群时,应分析原因,采取相应措施重新观测。
3)四等及以上等级控制网的边长测量,应分别量取两端点观测始末的气象数据,计算时应取平均值。
4)测量气象元素的温度计宜采用通风干湿温度计,气压表宜选用高原型空盒气压表;读数前应将温度计悬挂在离开地面和人体1.5m以外阳光不能直射的地方,且读数精确至0.2℃;气压表应置平,指针不应滞阻,且读数精确至50Pa。
5)当测距边用电磁波测距三角高程测量方法测定的高差进行修正时,垂直角的观测和对向观测高差较差要求,可按五等电磁波测距三角高程测量的有关规定放宽一倍执行。
(6)普通钢尺量距的主要技术要求见表7-6。
表7-6 普通钢尺量距的主要技术要求

注:1.最距边长应进行温度、坡度和尺长改正。
2.当检定钢尺时,其相对误差不应大于1/100000。
3.水平角观测
(1)水平角观测所使用的全站仪、电子经纬仪和光学经纬仪,应符合下列相关规定:
1)照准部旋转轴正确性指标:管水准器气泡或电子水准器长气泡在各位置的读数较差,1″级仪器不应超过2格,2″级仪器不应超过1格,6″级仪器不应超过1.5格。
2)光学经纬仪的测微器行差及隙动差指标:1″级仪器不应大于1″,2″级仪器不应大于2″。
3)水平轴不垂直于垂直轴之差指标:1″级仪器不应超过10″,2″级仪器不应超过15″,6″级仪器不应超过20″。
4)补偿器的补偿要求,在仪器补偿器的补偿区间,对观测成果应能进行有效补偿。
5)垂直微动旋转使用时,视准轴在水平方向上不产生偏移。
6)仪器的基座在照准部旋转时的位移指标:1″级仪器不应超过0.3″,2″级仪器不应超过1″,6″级仪器不应超过1.5″。
7)光学(或激光)对中器的视轴(或射线)与竖轴的重合度不应大于1mm。
(2)水平角观测宜采用方向观测法,并符合下列规定:
1)方向观测法的技术要求,不应超过表7-7的规定。
2)当观测方向不多于3个时,可不归零。
3)当观测方向多于6个时,可进行分组观测。分组观测应包括两个共同方向(其中一个为共同零方向)。其两组观测角之差,不应大于同等级测角中误差的两倍。分组观测的最后结果,应按等权分组观测进行测站平差。
表7-7 水平角方向观测法的技术要求
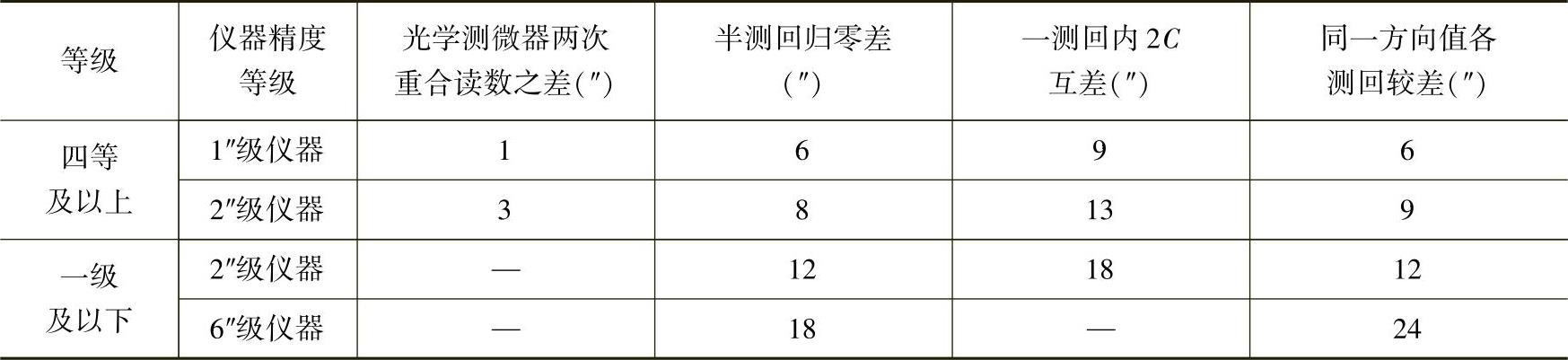
注:1.全站仪、电子经纬仪水平角观测时不受光学测微器两次重合读数之差指标的限制。
2.当观测方向的垂直角超过±3°的范围时,该方向2C互差可按相邻测回同方向进行比较,其值应满足表中一测回内2C互差的限值。
4)各测回间应配置度盘。(https://www.xing528.com)
5)水平角的观测值应取各测回的平均数作为测站成果。
(3)三、四等导线的水平角观测,当测站只有两个方向时,应在观测总测回中以奇数测回的度盘位置观测导线前进方向的左角,以偶数测回的度盘位置观测导线前进方向的右角。左、右角的测回数为总测回数的一半。但在观测右角时,应以左角起始方向为准变换度盘位置,也可用起始方向的度盘位置加上左角的概值在前进方向配置度盘。
左角平均值与右角平均值之和与360°之差,不应大于表7-7中相应等级导线测角中误差的两倍。
(4)水平角观测的测站作业,应符合下列规定:
1)仪器或反光镜的对中误差不应大于2mm。
2)水平角观测过程中,气泡中心位置偏离整置中心不宜超过1格。四等及以上等级的水平角观测,当观测方向的垂直角超过±3°的范围时,宜在测回间重新整置气泡位置。有垂直轴补偿器的仪器,可以受此款的限制。
3)如受外界因素(如震动)的影响,仪器的补偿器无法正常工作或超出补偿器的补偿范围时,应停止观测。
4)当测站或照准目标偏心时,应在水平角观测前或观测后测定归心元素。测定时,投影示误三角形的最长边,对于标石、仪器中心的投影不应大于5mm,对于照准标志中心的投影不应大于10mm。投影完毕后,除标石中心外,其他各投影中心均应描绘两个观测方向。角度元素应量至15′,长度元素应量至1mm。
(5)水平角观测误差超限时,应在原来度盘位置上重测,并应符合下列规定:
1)一测回内2C互差或同一方向值各测回较差超限时,应重测超限方向,并联测零方向。
2)下半测回归零差或零方向的2C互差超限时,应重测该测回。
3)若一测回中重测方向数超过总方向数的1/3时,应重测该测回。当重测的测回数超过总测回数的1/3时,应重测该站。
(6)首级控制网所联测的已知方向的水平角观测,应按首级网相应等级的规定执行。
4.联测
如图7-2所示,导线与高级控制网连接时,需观测连接角βA、β1和连接边DA1,用于传递坐标方位角和坐标。若测区及附近无高级控制点,在经过主管部门同意后,可用罗盘仪观测导线起始边的方位角,并假定起始点的坐标为起算数据。
(四)导线测量的内业计算
1.闭合导线的计算
现以图7-3所示的闭合导线为例,介绍闭合导线内业计算的步骤,具体运算过程及结果参见表7-8。计算之前,首先将导线草图中的点号、角度的观测值、边长的量测值以及起始边的方位角、起始点的坐标等填入“闭合导线坐标计算表”中,如表7-8中的第1栏、第2栏、第5、6栏的第一项、第13、14栏的第一项所示。然后按以下步骤进行计算。
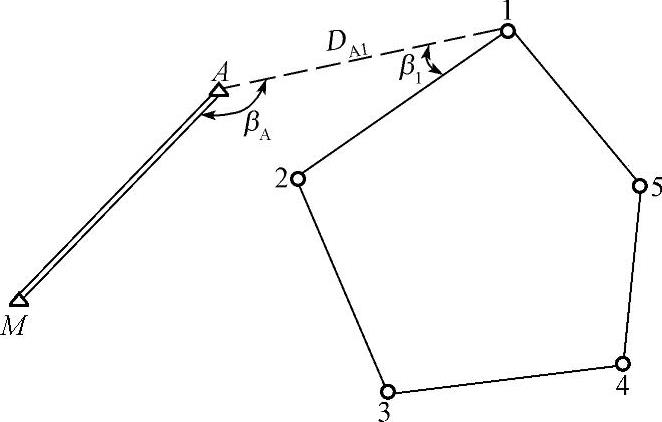
图7-2 联测示意图
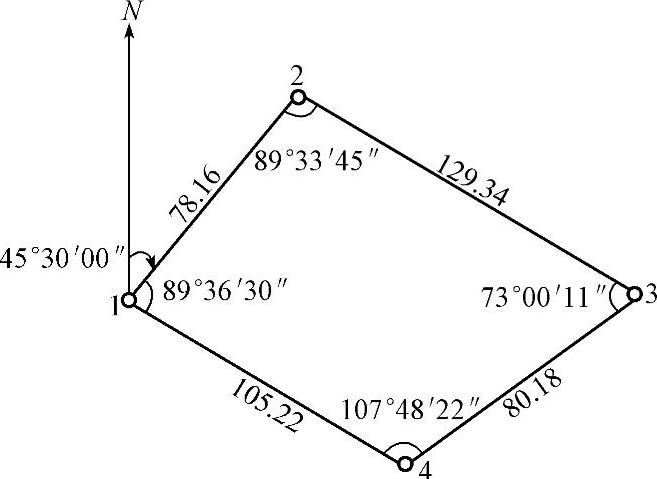
图7-3 闭合导线草图
表7-8 闭合导线坐标计算表
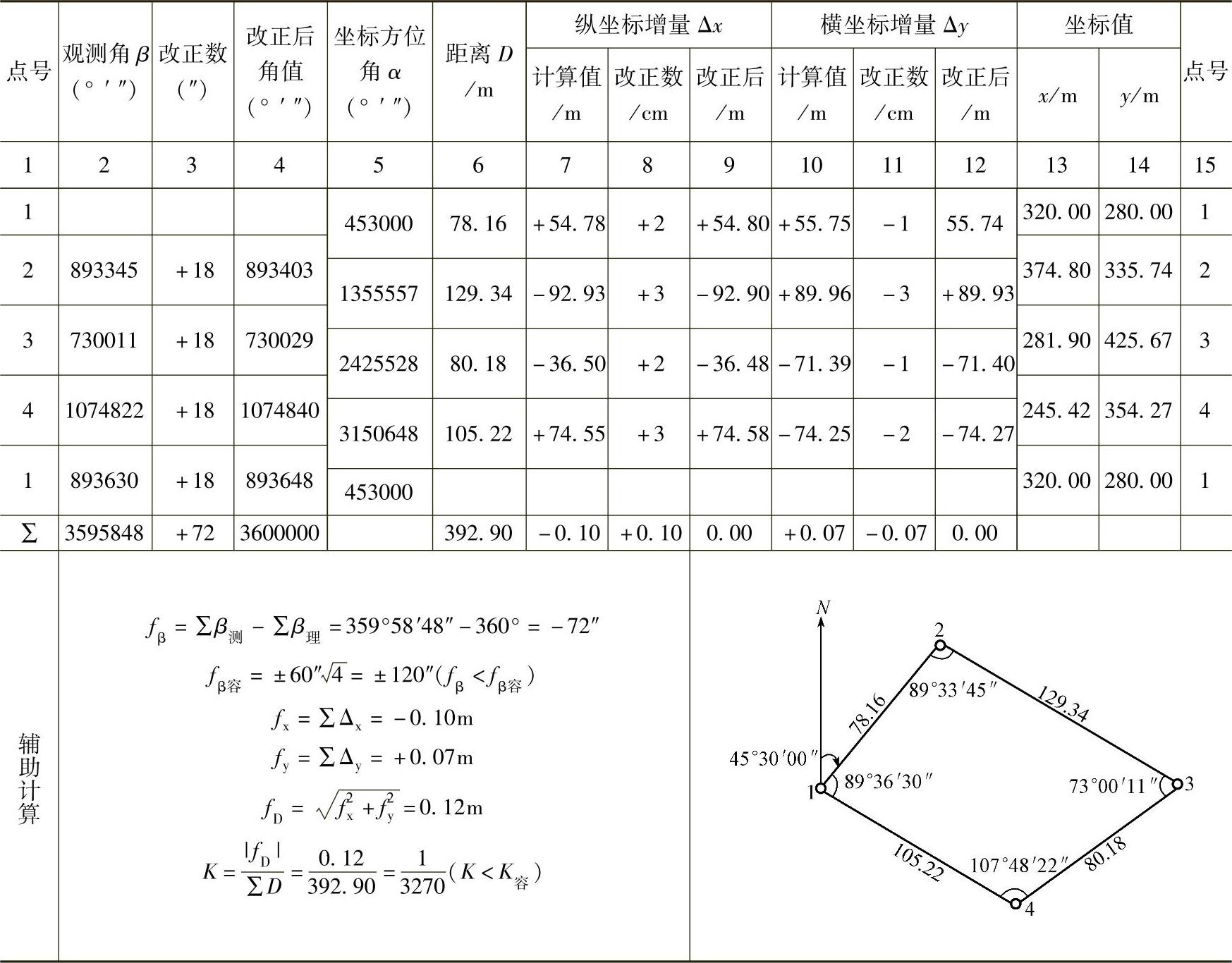
(1)角度闭合差的计算与调整:闭合导线在几何上是一个n边形,其内角和的理论值为:
∑β理=(n-2)×180°
但在实际观测过程中,由于存在着误差,使实测的多边形的内角和不等于上述的理论值,二者的差值称为闭合导线的角度闭合差,习惯以fβ表示。即有:
fβ=∑β测-∑β理=∑β测-(n-2)×180°
式中 ∑β理——转折角的理论值;
∑β测——转折角的外业观测值。
如果fβ>fβ容许,则说明角度闭合差超限,不满足精度要求,应返工重测直到满足精度要求;如果fβ≤fβ容许,则说明所测角度满足精度要求,在此情况下,可将角度闭合差进行调整。因为各角观测均在相同的观测条件下进行,所以可认为各角产生的误差相等。因此,角度闭合差调整的原则是:将fβ以相反的符号平均分配到各观测角中,若不能均分,一般情况下,将余数分配给短边的夹角,即各角度的改正数为:
vβ=-fβ/n
则各转折角调整以后的值(又称改正值)为:
β=β测+vβ
调整后的内角和必须等于理论值,即:
∑β=(n-2)×180°
(2)导线边坐标方位角的推算:根据起始边的已知坐标方位角及调整后的各内角值,可以推导出,前一边的坐标方位角α前与后一边的坐标方位角α后的关系式:
α前=α后±β∓180°
但在具体推算时要注意以下几点。
1)上式中的“±β∓180°”项,若β角为左角,则应取“+β-180°”;若β角为右角,则应取“-β+180°”。
2)如用公式推导出来的α前<0°,则应加上360°;若α前>360°,则应减去360°,使各导线边的坐标方位角在0°~360°的取值范围内。
3)起始边的坐标方位角最后也能推算出来,推算值应与原已知值相等,否则推算过程有误。
(3)坐标增量的计算:一导线边两端点的纵坐标(或横坐标)之差,称为该导线边的纵坐标(或横坐标)增量,常以Δx(或Δy)表示。
设i、j为两相邻的导线点,量两点之间的边长为Dij,已根据观测角调整后的值推出了坐标方位角为αij,应当由三角几何关系可计算出i、j两点之间的坐标增量(在此称为观测值)Δxij和Δyij,分别为:
Δxij测=Dij·cosαij
Δyij测=Dij·sinαij
(4)坐标增量闭合差的计算与调整:因闭合导线从起始点出发经过若干个导线点以后,最后又回到了起始点,其坐标增量之和的理论值应为零,如图7-4a所示。
∑Δxij理=0
即: ∑Δyij理=0
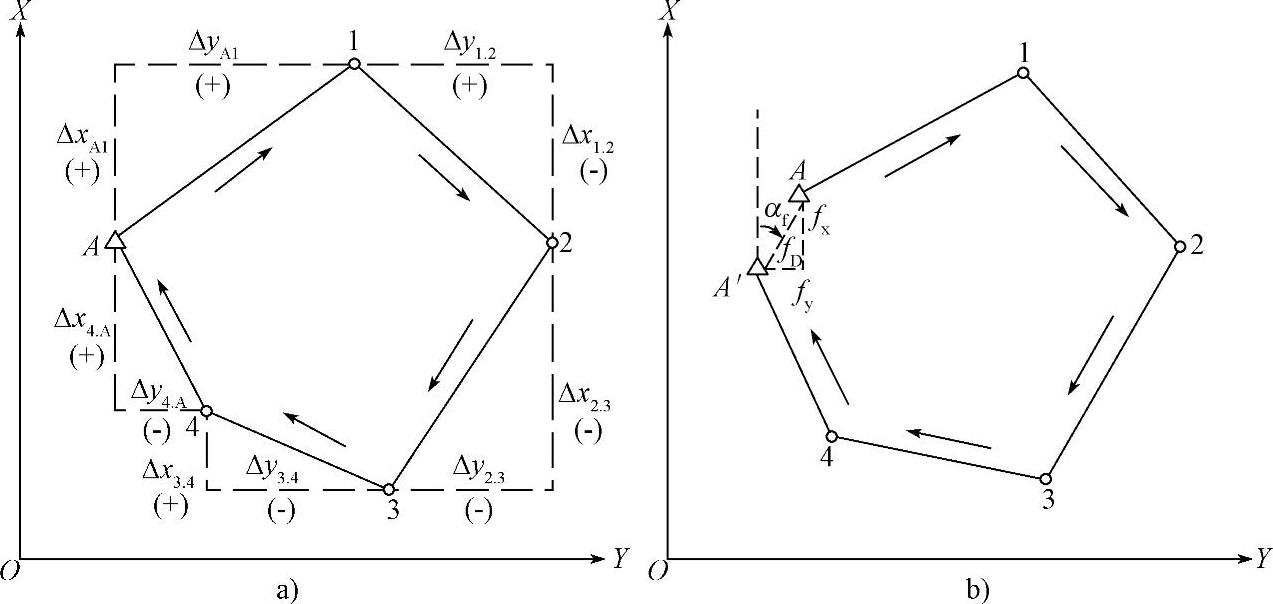
图7-4 闭合导线坐标增量及闭合差
由于坐标增量闭合差存在,根据计算结果绘制出来的闭合导线图形不能闭合,如图7-4b所示,不闭合的缺口距离,称为导线全长闭合差,通常以fD表示。按几何关系,用坐标增量闭合差可求得导线全长闭合差fD。
导线全长闭合差fD是随着导线的长度增大而增大的,导线测量的精度是用导线全长相对闭合差K(即导线全长闭合差fD与导线全长∑D之比值)来衡量的,即:
导线全长相对闭合差K常用分子是1的分数形式表示。
若K≤K容,表明测量结果满足精度要求,可将坐标增量闭合差反符号后,按与边长成正比的方法分配到各坐标增量上去,从而得到各纵、横坐标增量的改正值,以ΔXij和ΔYij表示:
式中的vΔXij、vΔYij分别称为纵、横坐标增量的改正数,即:
(5)导线点坐标计算:根据起始点的已知坐标和改正后的坐标增量ΔXij和ΔYij,按下面两个计算式依次计算各导线点的坐标:
2.附合导线的计算
(1)角度闭合差的计算:附合导线首尾有两条已知坐标方位角的边,如表7-3附合导线图中的BA边和CD边,称之为始边和终边,由于已测得导线各个转折角的大小,所以,可以根据起始边的坐标方位角及测得的导线各转折角,推算出终边的坐标方位角。这样导线终边的坐标方位角有一个原已知值a终,还有一个由始边坐标方位角和测得的各转折角推算值α终′。由于测角存在误差,导致两个数值不相等,两值之差即为附合导线的角度闭合差fβ。即:
fβ=α终′-α终=α始-α终±∑β∓n×180°
(2)坐标增量闭合差的计算:附合导线的首尾各有一个已知坐标值的点,如表7-3支导线图中所示的A点和C点,称之为始点和终点。附合导线的纵、横坐标增量的代数和,在理论上应等于终点与始点的纵、横坐标差值,即:
但由于量边和测角有误差,根据观测值推算出来的纵、横坐标增量之代数和:∑Δxij测和∑Δyij测与理论值通常是不相等的,二者之差即为纵、横坐标增量闭合差:
3.支导线计算
由于支导线既不回到原起始点上,又不附合到另一个已知点上,所以在支导线计算中也就不会出现两种矛盾。一是观测角的总和与导线几何图形的理论值不符的矛盾,即角度闭合差;二是从已知点出发,逐点计算各点坐标,最后闭合到原出发点或附合到另一个已知点时,其推算的坐标值与已知坐标值不符的矛盾,即坐标增量闭合差。
支导线没有检核限制条件,不需要计算角度闭合差和坐标增量闭合差,只要根据已知边的坐标方位角和已知点的坐标,把外业测定的转折角和转折边长,直接计算出各边方位角及各边坐标增量,最后推算出待定导线点的坐标。
所以,支导线只适用于图根控制补点使用。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。