



1.双移线测试
测试规范
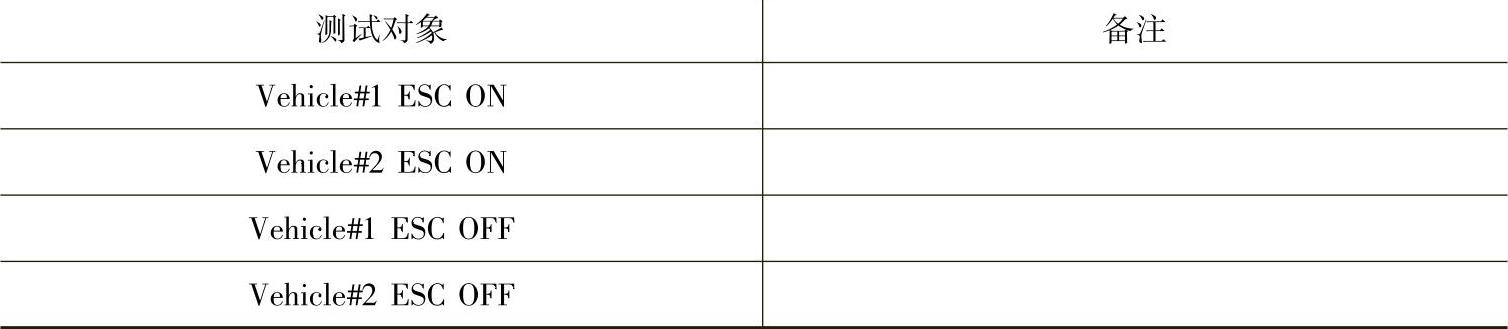
车辆及系统定义
测试流程
1)在试验场地上按图4-6所示布置标杆,其标杆距离参数取值参如下图4-6所示,标杆为高为500mm,直径为285mm的锥形警示筒。
2)试验驾驶人应具有较丰富的驾驶经验。在正式试验前,按图4-6所示路线,练习五个往返。
3)试验前,以初始试验车速行驶10km,使轮胎升温,接通仪器电源。
4)试验开始时,驾驶人保持50km/h速度直线行驶进入双移线,并尽量将汽车运行轨迹控制在双移线轨道中,在第一个标杆处松开加速踏板,在整个试验过程中松开节气门和制动踏板,仅通过调整转向盘来控制车辆,撞倒任何一个标杆都算不通过。通过后,测量各项数据并记录下本次试验的行驶轨迹。
5)联合驾驶机器人设定为学习模式,以50km/h的速度学习并重复第一次试验的行驶轨迹。控制试验车的转向输入,如果试验成功,继续做下一次试验,每次试验速度递增10km/h,直到试验失败时终止,记录下每次试验的车速。
6)在进行车道变换前,试验车以不同的试验车速行驶,横摆角速度应在(0°±0.5°)/s范围内。试验车辆沿标记好的试验路线行驶,确保前轴中点与试验路线的偏移距离不超过±0.15m,并记录数据。
7)每次试验结束,待车辆制动至完全静止后,断开仪器电源。(https://www.xing528.com)
8)在每个试验车速下至少进行三组有效试验,推荐左转、右转都应进行试验。
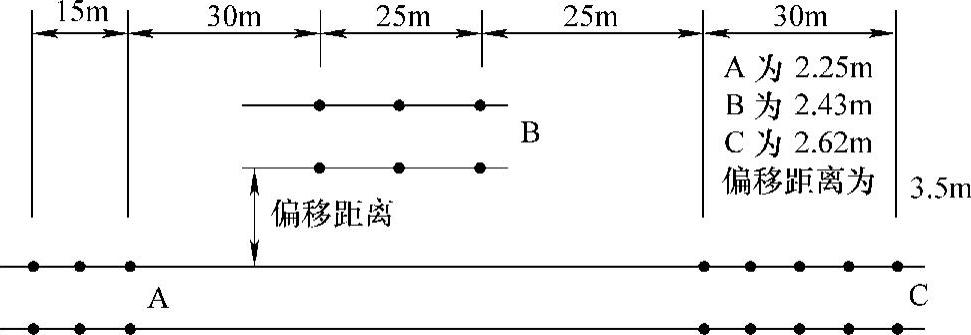
图4-6 标杆布置(一)
2.对比项目和评分变量
车辆性能对比:在ESC开启时,将指标数据直接用对比不同车辆的性能。这项测试中,选取 作为指标来评价ESC的控制效果。
作为指标来评价ESC的控制效果。
2)β和 综合指标的最大值
综合指标的最大值

式中 β和 ——同一时刻的数值。
——同一时刻的数值。
3)最大的通过速度vmax
车辆基础性能对比:在ESC关闭条件下,对两辆车的指标数据直接进行对比。选取的对比指标与ESC开启时的指标相同。操稳改善程度对比
(ESC ON-ESC OFF)/(ESC OFF)×100%
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。