



汽车在不同行驶状态下,对不同性能之间的侧重有所不同。因此,不同车速范围的牵引力控制原则也有所不同,所采用的控制途径也有区别。
1.起步加速过程
车辆在均匀路面起步加速过程中,提高车辆的加速性能是TCS控制的主要目标,各驱动车轮间的地面驱动力差异不会对汽车的行驶稳定性产生太大的影响,此时,应充分利用各驱动车轮的纵向附着力,使汽车获得尽可能大的起步加速能力。
TCS通过控制发功机输出力矩和驱动车轮的制动力,提高车辆的动力性,必要时主动控制自动变速器的档位,以提高车辆的起步能力。其中,发动机输出力矩控制按高选原则进行,即以发动机输出力矩维持在保证高附着一侧的车轮不发生过度滑转的最大值为原则。驱动轮的制动力控制按彼此独立原则进行,对两侧驱动车轮的制动力进行分别调节,使两侧驱动车轮的滑移率都处于峰值附着系数附近的范围之内。
2.中速行驶过程
车辆的行驶速度为中速时,驱动防滑控制的目标是保证汽车具有良好的行驶稳定性并具有较好的加速性。为保证车辆具有良好的稳定性,必须将两侧驱动车轮的牵引力不平衡控制在较小范围之内。此时,车轮的滑移率不能过大,才能保证车轮具有一定的横向附着力,以免车辆失稳。
在汽车中速行驶过程时,通过控制发动机输出力矩和对驱动车轮进行制动介入等途径进行驱动轮滑移控制,同时改变自动变速器的换档规律,使其提前换入较高档位且防止其降档。其中,发动机输出力矩应按低选原则进行控制,即发动机输出力矩应控制在使附着力较小的驱动车轮不发生滑转的最大值;驱动车轮制动力控制在牵引力控制中所占的比例应该适当减小,发动机力矩控制所占比例应增大,对两侧驱动车轮的牵引力不平衡进行限制,保证汽车具有较好的方向稳定性。
3.高速行驶过程
在车辆高速行驶过程中,对驱动轮进行制动介入,可能使车辆失去转向响应性。此时保证汽车的转向响应性成为TCS控制的首要控制目标;同时,高速行驶时进行制动介入会导致制动器过热和磨损加剧。(https://www.xing528.com)
因此,汽车高速行使时,仅通过控制发动机输出力矩进行TCS控制,并且应按低选原则对发动机的输出力矩进行控制,使两侧驱动车轮的牵引力能够保持平衡。
图3-2为TCS的简化控制流程图,其内容为:主循环开始后,首先调用信号采集模块,通过各个传感器采集TCS控制所需的信号,如车轮角速度信号、制动灯信号、转向盘转角信号。之后计算车轮轮速、汽车行驶速度及车轮角加速度值。并对TCS系统进行自检,在未报错的情况下,依次调用牵引力控制子程序、电子节气门驱动子程序和HCU驱动子程序,并向自动变速器发送档位控制信号。
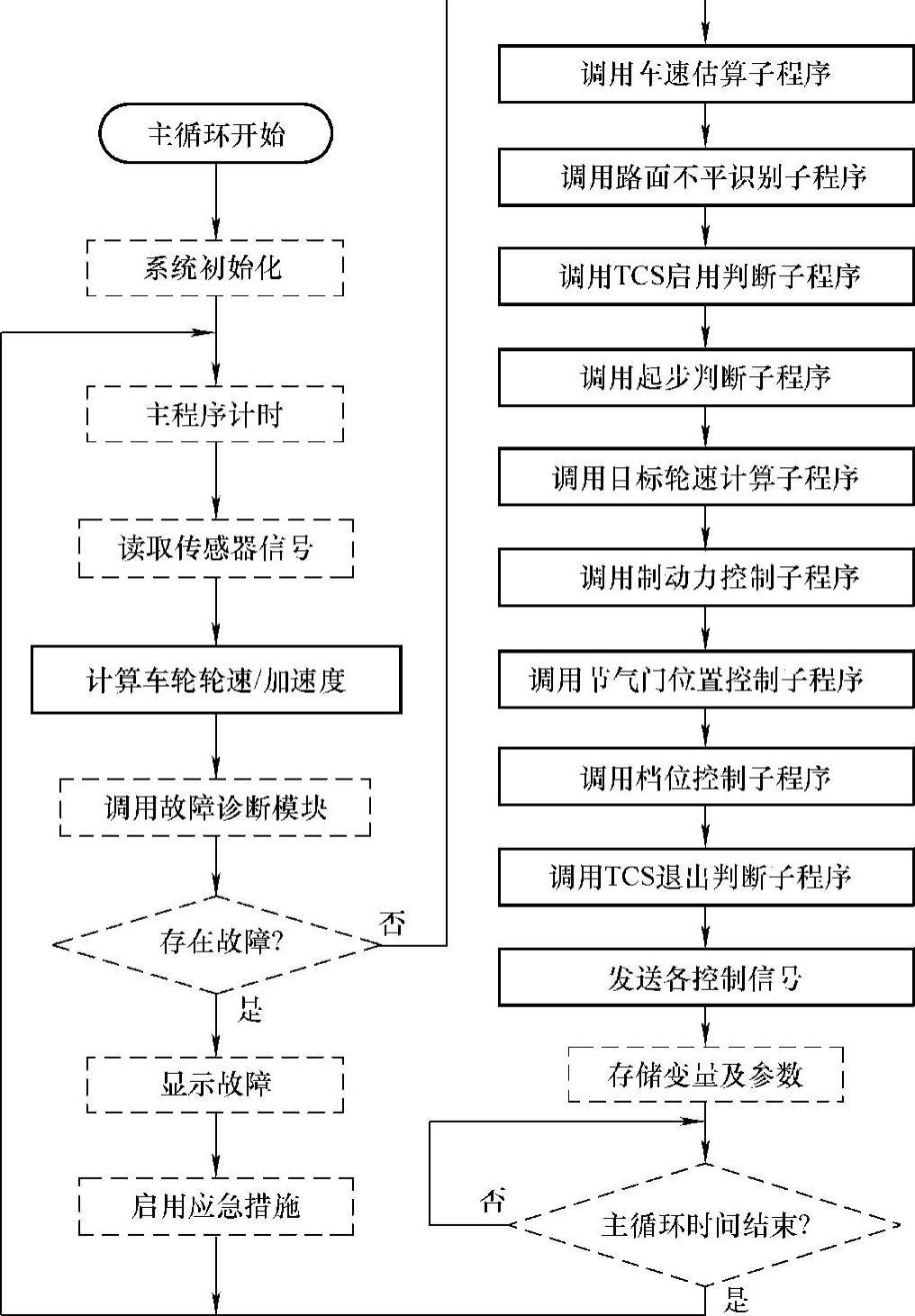
图3-2 控制流程图
4.制动器的控制方法
TCS的制动控制和ABS控制相似,但也有其复杂性和副作用。因为在加速或高速制动会在传动系产生很大的动载荷及噪声,极限工况可能会超出车辆的允许范围。和ABS一样,TCS对两个驱动轮制动控制方法主要采用独立控制。在工程上,TCS系统对制动控制采用的控制方法仍然是门限值控制方法。图3-3为较为常见的一种TCS控制逻辑。sT∗是纵向目标滑移率,sx,l、sx,r分别是左右轮滑移率,Lx2是速度门限值。当左右车轮的滑移率都大于目标滑移率时,采用节气门控制。速度大于速度门限值Lx2,采用低附着系数的方式,速度小于速度门限值Lx2时,采用高附着系数的方式。当驱动轮中一个车轮的滑移率大于目标滑移率,另一个小于目标滑移率时,就采用制动控制和节气门控制相结合的办法。
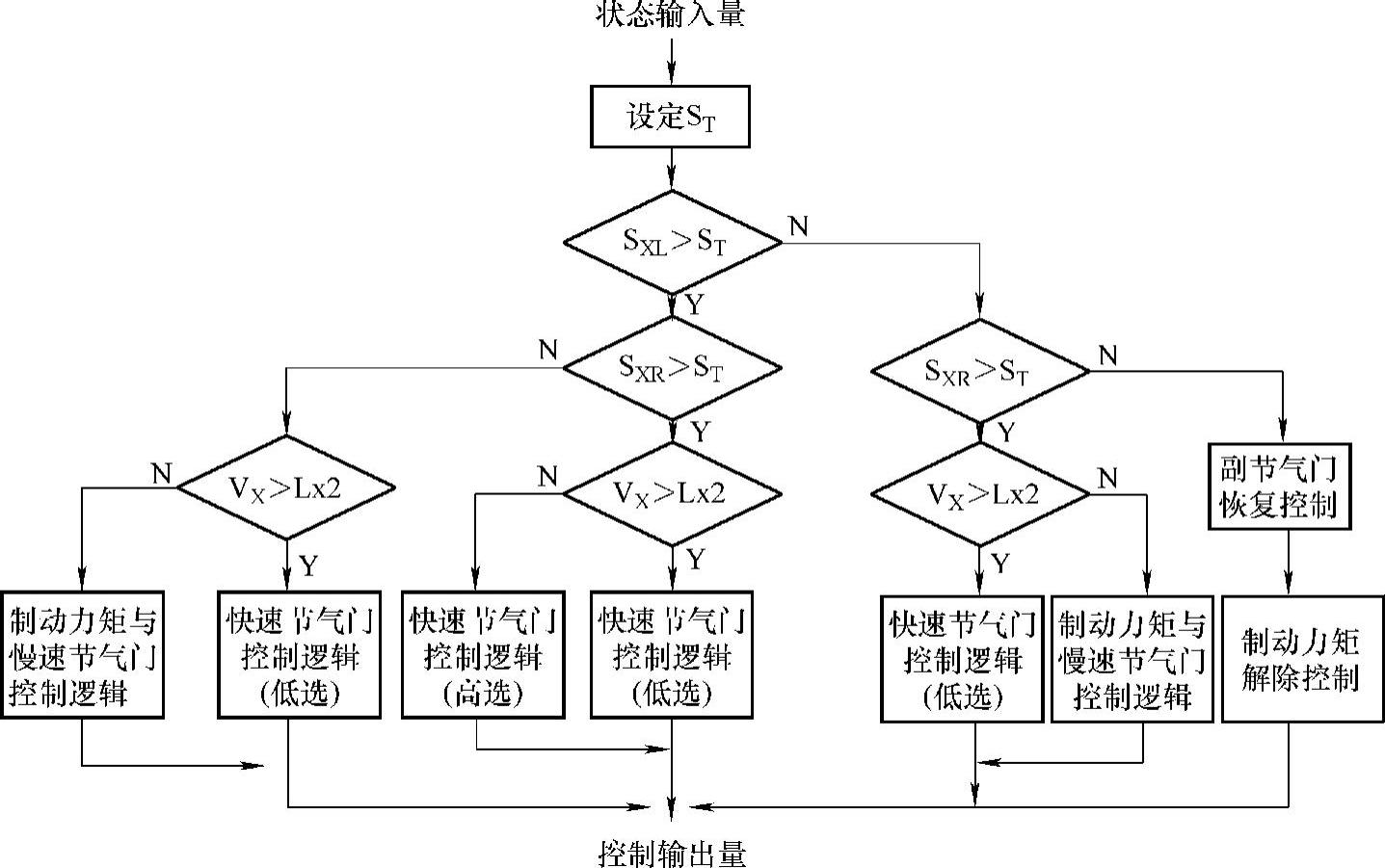
图3-3 TCS控制逻辑框图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。