



现有的ESC系统是在ABS和TCS的基础上发展起来的,因此ESC系统包含着ABS和TCS的所有功能。为了有机地协调汽车的纵向和横向运动的控制,不同的ESC系统生产厂家采用了不同的控制方案。下面以博世公司的ESP系统为例,对ESC系统的软件算法及控制逻辑进行阐述。
ESP系统为了能够侦测车辆行驶状态和驾驶人意图,并进行相应的控制响应,通常需要包括以下几个部分的控制模块:车辆状态感知模块、横摆力矩分配模块、车轮滑移控制模块、轮缸压力控制模块等,如图1-12所示。
各部分模块采用了级联结构相互联系,都由内反馈回路和外反馈回路构成。内反馈回路控制车轮滑移率,外反馈回路控制汽车运动。在外反馈回路中,由汽车理想运动和实际运动的差值,对内反馈回路中的车轮目标滑移率进行修正,其信号流图如图1-13所示。
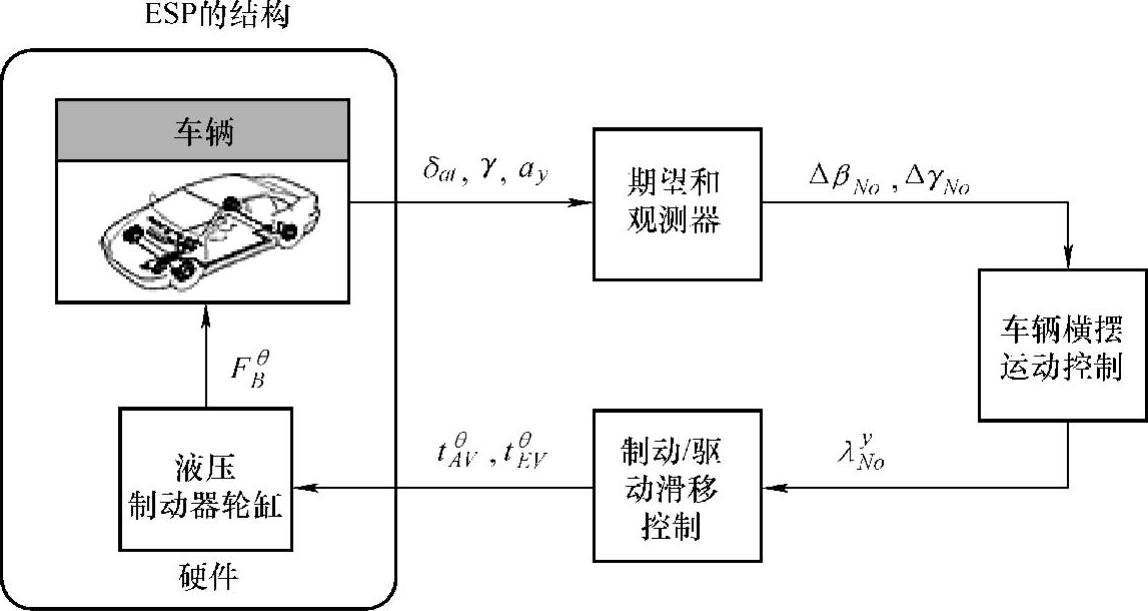
图1-12 ESP系统中的主要模块及其相互关系
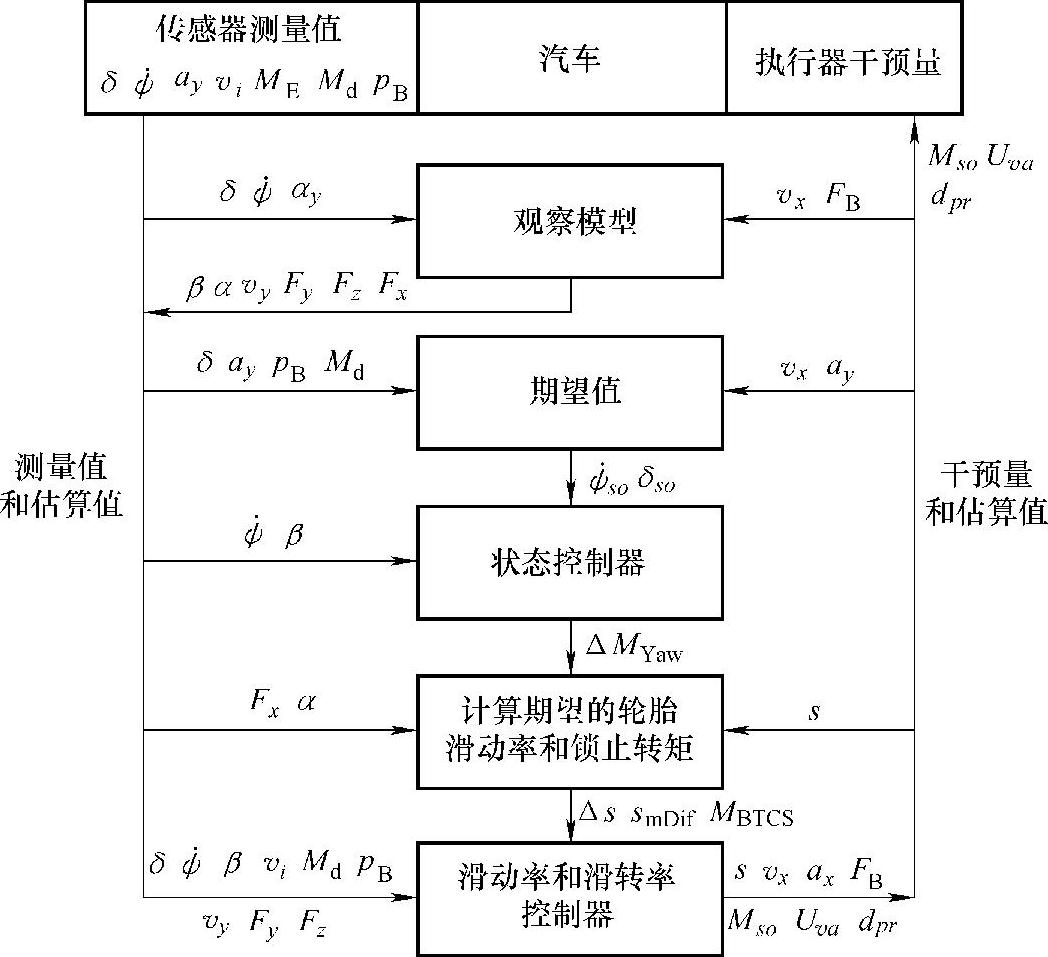
图1-13 博世ESP控制器中的信号流图
1.车辆状态感知模块
车辆状态感知模块主要用于获取驾驶人的驾驶意图、车辆的理想行驶状态和实际行驶状态,从而判断车辆当前是否能够执行驾驶人的驾驶意图,或车辆是否处于危险行驶工况。
目前,车辆稳定控制系统中所使用的关键动力学参数包括:横摆角速度,纵向、横向加速度,纵向车速,质心侧偏角和路面峰值附着系数等。其中,车辆质心侧偏角和横摆角速度对ESP系统而言至关重要。
在车辆转弯的过程中,车辆所需的路面横向作用力逐渐增大,由于轮胎的弹性效应和侧偏特性,轮胎开始产生侧偏角并逐渐增大,在车辆坐标系下,这直接导致了车辆开始产生横向车速和横向位移,也就是车辆的实际前进方向不再与车辆纵轴方向重合,车辆质心位置开始出现质心侧偏角。当车辆所需的横向作用力突破轮胎的横向附着极限,进入轮胎侧偏力的饱和区域时,轮胎侧偏角的绝对值迅速增大,相应地,车辆质心侧偏角的绝对值也迅速增大,车辆出现明显的侧滑,如果车辆的后轴车轮先于前轴车轮突破轮胎的附着极限,那么车辆将出现激转失控。如果车辆的前轴车轮先于后轴车轮突破轮胎与地面的附着极限时,那么车辆将失去转向能力。因此,质心侧偏角是反映车辆行驶稳定性的重要指标,当质心侧偏角较大时,单纯通过改变前轮转向角来改变前轮侧偏角,进而改变车辆横摆力矩,控制车辆转弯轨迹和转弯姿态的方法就已经很难奏效了,普通驾驶人此时几乎无法通过转向盘来有效控制车辆。
但是,受限于当前传感器发展的技术水平和成本要求,车辆质心侧偏角还无法通过简单廉价的传感器直接、准确地测量获取。因此,工程上,通常采用估计的方法来实时获取车辆的质心侧偏角。目前,质心侧偏角的估计方法主要可以分为两大类:基于运动学的估计方法和基于动力学的估计方法,不同的方法各有利弊,其优缺点对比如表1-1所示。
运动学估计方法,主要是根据横向加速度和横摆角速度传感器信号的直接积分法(Direct Integration Method,简称运动学估计方法)估计质心侧偏角。该方法对车辆参数、路面附着条件和驾驶操纵方式的变化都具有非常好的鲁棒性,并且在传感器信号准确的情况下,其估计结果在车辆的线性操纵区,对实际车辆质心侧偏角的变化趋势都具有较高的估计精度。但运动学估计方法严格依赖于传感器信息,对传感器的安装、标定和传感器的精度都有很高的要求。大量的研究证明,单纯依赖运动学模型无法做到质心侧偏角的
表1-1 各方法性能对比
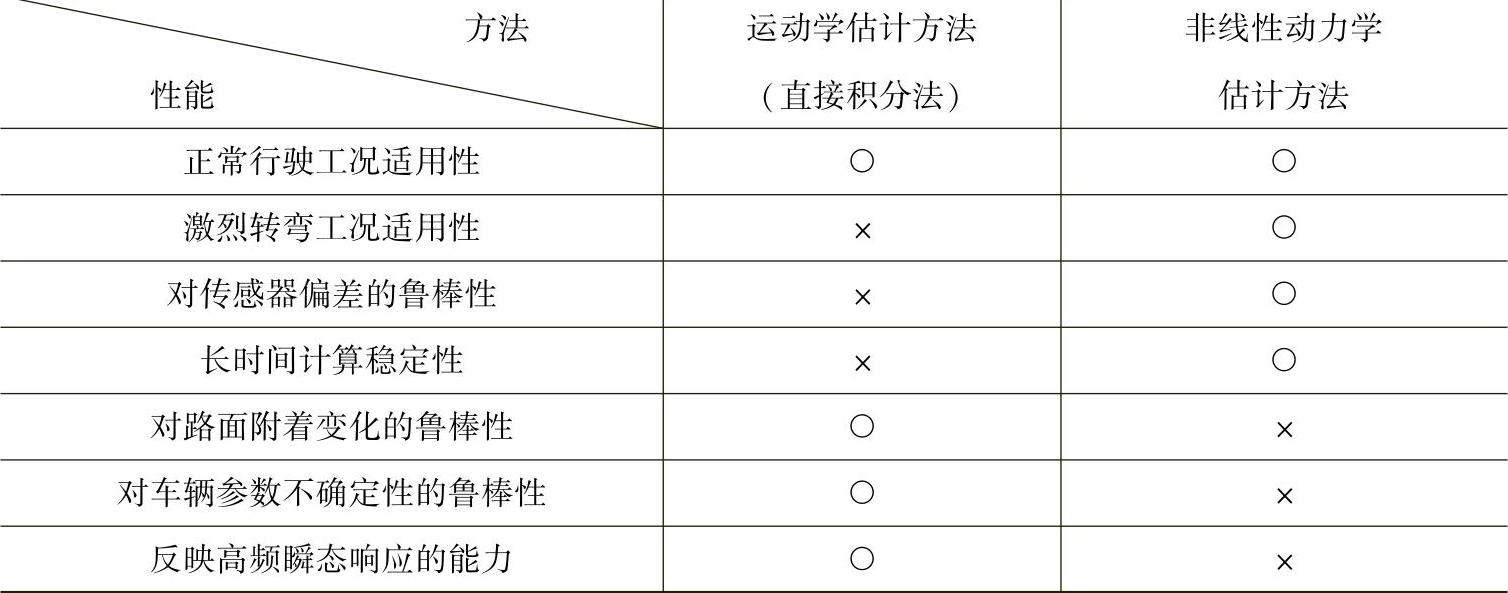
注:表格中,优点用○表示,缺点用×表示。
准确估计,积分累积误差是影响运动学估计方法的主要因素。此外,在非线性操纵区域下,车辆由急减速产生的车身俯仰角与急转弯产生的车身侧倾角是无法忽略的,使用运动学估计方法得到的质心侧偏角会出现较大的偏差。
因此,在运动学的基础上,通常还需要采用动力学估计方法,来确保大部分时间里,车辆质心侧偏角估计的准确性。与GPS/光学传感器测量或运动学估计方法相比,动力学估计方法对传感器的要求不高,是一种基于低成本传感器配置方案的估计方法。目前,基于动力学估计方法的ESP标准传感器配置方案,通常包括:纵/横向加速度传感器、横摆角速度传感器、转向盘转角传感器和轮速传感器,并且为了能够在车辆稳定控制的过程中准确获取四个车轮的轮胎力,保持对车辆状态准确估计的能力,通常还需要提供其他额外的传感器信号,例如制动主缸压力和轮缸压力等。
动力学方法的基本原理是在车辆动力学模型和轮胎模型的基础上,计算轮胎的侧偏力,进而计算获得车辆的横向加速度和横摆角速度,并通过现代控制理论中的观测器技术,最终估计出车辆的质心侧偏角,如图1-14所示。因此,采用不同的车辆或轮胎模型对估计结果会产生重要影响。
前文提到的经典的单轨二自由度车辆模型,即自行车模型,是车辆横向动力学中最常使用的模型之一。模型只有前后两个车轮,轮胎载荷即为前后轴荷,并且假设车辆纵向车速不变,因此前后轴荷是固定的。在高附着系数的路面上,这样的单轨车辆模型对横向加速度0.4g以内的转弯工况具有足够好的描述精度。因此,很多动力学估计方法都是基于这种单轨二自由度车辆模型的。然而,由于轮胎的侧偏刚度随轮胎载荷成非线性变化,车辆在激烈转向工况下,轴荷会在左右车轮上重新分配,使得各车轮的侧偏刚度出现不同程度的增大或减小,从而直接影响车辆的操纵稳定性。因此,激烈转向工况下,单轨二自由度车辆模型不再能够满足估计要求,双轨四轮二自由度车辆模型得到了大量的应用,如图1-15所示。
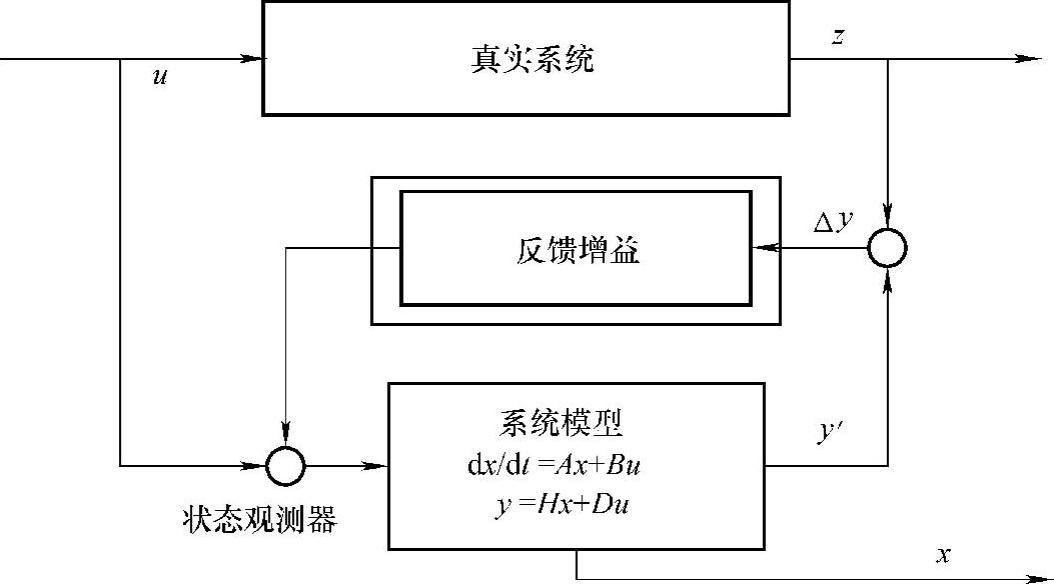
图1-14 现代控制理论中的观测器技术
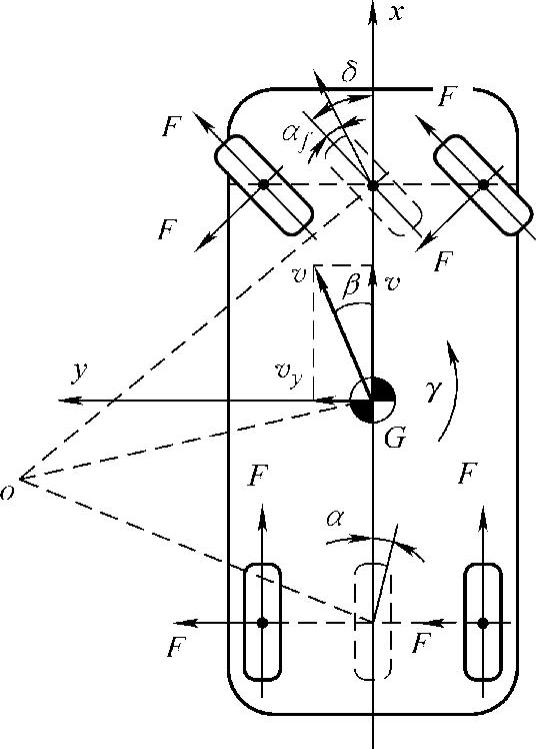
图1-15 双轨四轮二自由度车辆模型
估计模型中不同的轮胎模型也会对车辆状态估计产生重要影响。目前,用于车辆状态估计用的轮胎模型主要包括两大类:一类是线性轮胎模型,使用线性函数来描述轮胎横向力和侧偏角的变化关系,即轮胎的侧偏刚度是一个定值,不随着侧偏角和轮胎载荷变化而变化;另一类是非线性轮胎模型,其侧偏特性是一个非线性的函数关系,典型的轮胎模型包括魔术轮胎公式、HSRI轮胎模型、Uni-Tire轮胎模型和反正切函数轮胎模型等,魔术轮胎公式与线性轮胎模型的对比特性如图1-16所示。
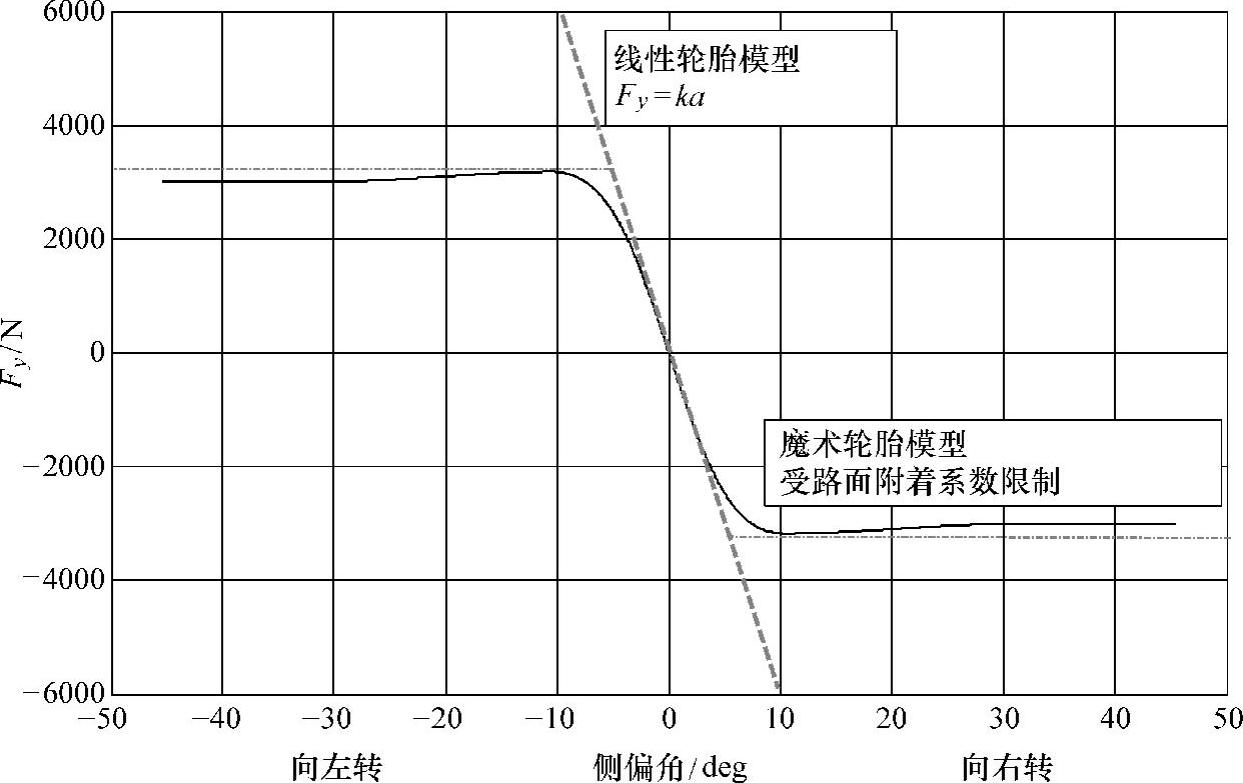
图1-16 线性轮胎模型和非线性轮胎模型(魔术轮胎公式)的对比图
线性轮胎模型的优势在于结构简单,观测器算法运算量小,并且在车辆横向运动并不激烈的情况下,具有较高的描述精度。然而,由于线性轮胎模型本身的局限性,基于线性模轮胎模型的动力学估计方法,只能够在车辆的线性操纵区域内提供较为可靠的估计结果,这对于只有在极限工况下才会触发工作的车辆稳定控制系统来说,显然是不够的。在极限转弯工况下,基于非线性轮胎模型的估计方法,其估计精度比线性估计方法具有更高的估计精度。然而,基于非线性轮胎模型的估计方法也存在难以克服的问题,其依赖于大量精确的轮胎模型参数,算法结构复杂,运算量较大,并且需要对路面峰值附着系数进行自适应估计等,以HSRI轮胎模型为例,如式(1.5)所示


式中

式中 sx——车轮纵向滑移率;
α——轮胎侧偏角;
Cs——轮胎纵向初始滑移刚度;
Cα——车轮侧向初始侧偏刚度。
且

可以看出,HSRI轮胎模型至少需要四个关键参数,才能够计算出轮胎的纵向力和侧向力,并且任意参数不准确均会严重影响轮胎纵、侧向力的计算精度。因此,在估计车辆质心侧偏角的过程中,合理选择轮胎模型是极为重要的。
在合理确定车辆车体模型和轮胎模型的情况下,车辆质心侧偏角就可以通过现代观测器理论中估计的方法来获取,从而在ESP成本和性能上做出平衡和妥协。而车辆的横摆角速度、横纵向加速度则可以通过廉价的传感器方案直接测量获取,其测量精度和响应速度也远远超过了估计结果,因此一种多轴多测量的惯性传感器(具体详见ESP系统硬件的相关内容)在ESP系统上获得了广泛的应用。
在获取了车辆的质心侧偏角、横摆角速度等信息后,如何判断驾驶人的驾驶意图和车辆的行驶状态,成为至关重要的一步。目前,基本是采用β法来研究准平衡状态下车辆质心侧偏角对车辆横摆运动的影响。由图1-17可以看出,极限工况下车辆难以操作的原因在于:当车辆质心侧偏角持续增大时,由驾驶人转向盘转角引起的横摆角速度与侧向力增益迅速减少,单纯转动转向盘已很难影响车辆横摆力矩的变化。迅速增加的质心侧偏角表明轮胎侧偏角的快速增大使轮胎侧向力进入饱和区,无法再提供有效的侧向附着力,驾驶人转动转向盘已很难影响车辆的侧向运动。这种情况会导致驾驶人惊慌失措并过多地转向,力图使车辆跟随自己的行驶意图,但过多的转向在极限工况下反而会恶化车辆的操纵稳定性能。
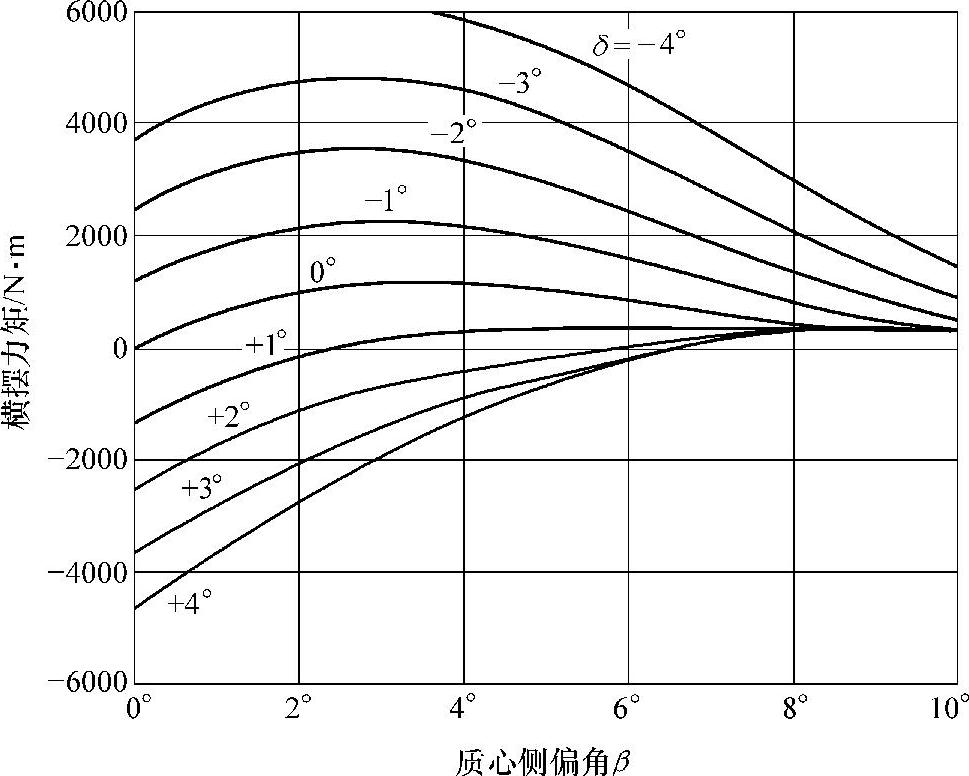
图1-17 β法分析车辆横摆力矩和质心侧偏角的关系
通常,在干燥沥青路面,使车辆丧失操纵能力的质心侧偏角阈值约为10°,在压实积雪路面约为4°。如果车辆的侧偏角接近该特征值,驾驶人对车辆的控制将基本丧失,驾驶人能够避免车辆事故的概率将大大减小。β法是从准横摆力矩平衡的角度讨论了车辆的侧向附着极限,但车辆在极限工况下具有强烈的非线性特性,因此可以通过基于相平面法对车辆极限工况下的稳定性能进行分析,如图1-18所示。相平面法普遍被认为可以合理有效的分析动态非线性系统的稳定性能,可以同时处理车辆的静态平衡极限与动态收敛的问题。
通过动力学分析的方法虽然可以有效确定ESP控制系统的稳定边界,保持车辆的稳定,但从“人-车-路”闭环系统开发的角度来看,忽略对驾驶人操纵行为,特别是极限工况下普通驾驶人的操纵行为研究,将无法基于ESP系统对驾驶人意图的响应性能和制动介入的舒适性能等主观评价,合理确定算法的优化方向,更无法进一步提升ESP系统控制算法的控制品质。
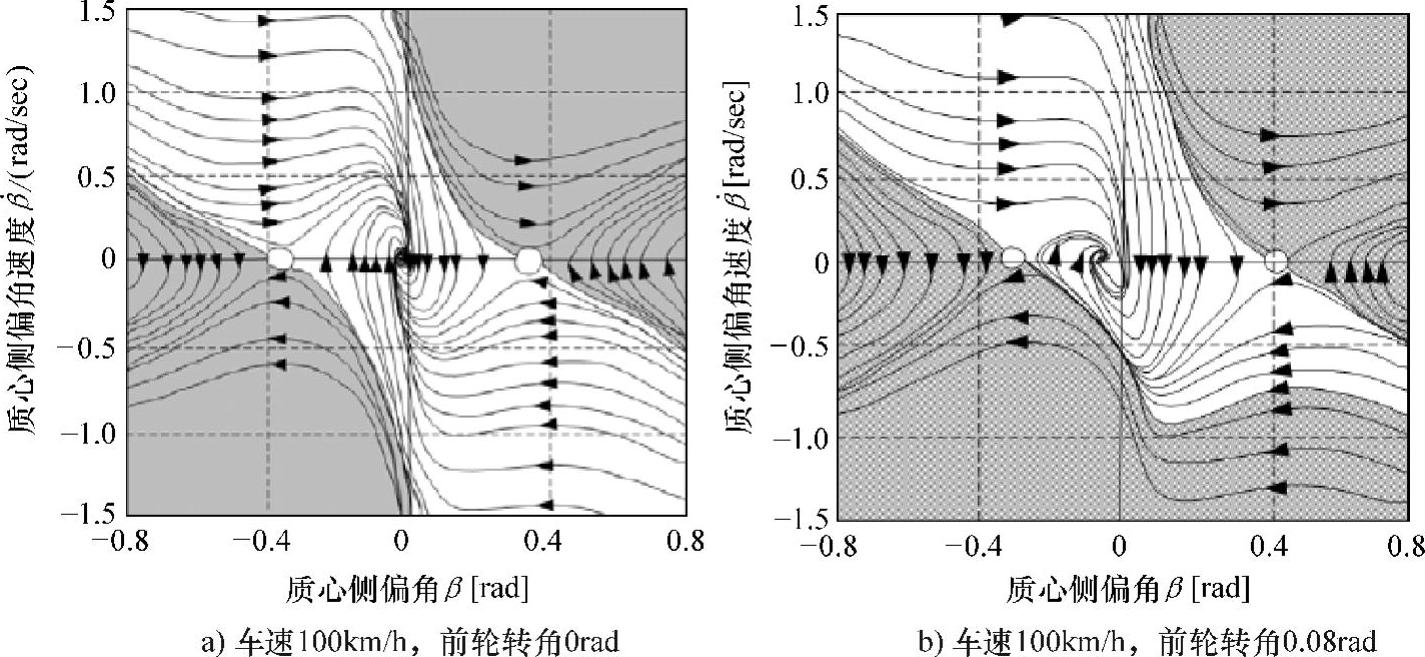
图1-18 应用β相平面法分析车辆行驶稳定性
通常,在“人-车-路”闭环系统中,驾驶人可以抽象为一个“控制器”。由于驾驶人对周围驾驶工况具有自学习、自适应的能力,并能根据被控制对象(车辆)特性的变化进行控制参数的自调整,但这种自调整的过程是非常缓慢的,且受限于在非线性区内驾驶经验的匮乏,驾驶人面对极限区车辆特性的突然变化时,仍依赖于原有的驾驶经验对车辆进行有“预见性”的操作,即驾驶人仍会按照线性区的操纵行为去控制极限工况下的车辆,这就导致车辆会很容易发生侧滑、甩尾等危险工况。
因此,获取驾驶人在轮胎线性区域内的驾驶意图和车辆状态,是判断车辆所处行驶状态的一个重要的参考指标。ESP是一种典型的反馈控制系统,其实现的前提是对驾驶人操纵意图的准确描述,这要求系统建立的车辆理想参考模型在不同行驶工况下都能较好地反映驾驶人转向意图,对驾驶人操纵意图的精确数学模型的建立是系统实现控制的前提。
汽车转弯过程中的理想行驶状态通常是通过采用车辆线性二自由度模型,对驾驶人理想行驶状态进行表征,并根据路面附着系数进行限制来获取的,如图1-19所示。
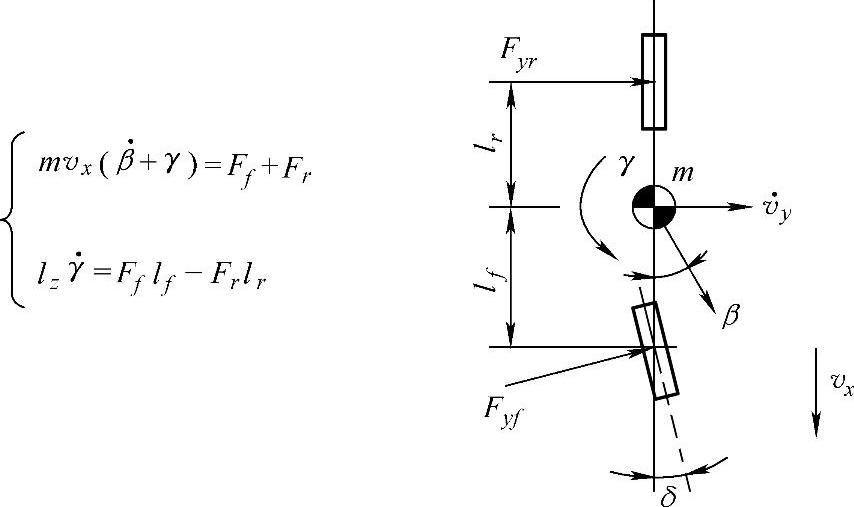
图1-19 单轨二自由度车辆模型及其动力学方程
其中,系统理想参考横摆角速度的计算公式如下(https://www.xing528.com)

式中 vx——车辆的纵向车速;
δ——车辆前轮转角;
uch——车辆的特征车速,其具体含义请参见车辆操纵稳定性动力学基础相关内容。
特征车速的确定,即稳定性因素K的确定是轮胎、车辆和转向系统等诸多参数综合的结果,其总值是考虑轮胎侧偏刚度、外倾推力、侧倾转向、回正力矩、横向载荷转移、转向系统等一系列综合效应后获取得到的。
K是表征汽车稳态响应的一个重要参数,可以通过二自由度稳态横摆角速度增益公式计算获得,然而实际汽车的K值受到许多因素的影响,如悬架、转向系统的结构等,所以它并不能简单地用公式计算求得,而必须采用转向盘角阶跃试验,并取车辆横摆角速度稳态后的值进行最小二乘拟合,从而得到不同侧向加速度下的稳定性因数值。
另一方面,由于量产车轮胎种类和花纹限制,通常情况下车辆的最大侧向加速度的g值无法超过轮胎与地面间的最大附着系数μ,故需对理想横摆角速度进行限制,得到理想横摆角速度的第二个值

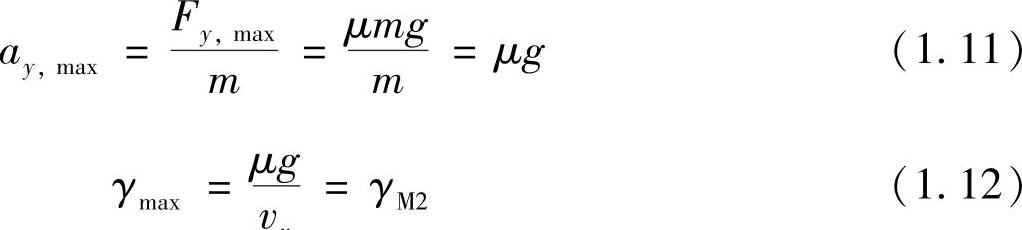
因此,车辆的理想横摆角速度取两个计算结果的最小者,如式(1.13)所示,ESP系统将根据该值与实际测量的横摆角速度大小,来判断车辆当前是否能够满足驾驶人的驾驶意图,或者车辆的行驶状态处于危险工况,并控制车辆跟随该理想横摆角速度值

由于横摆角速度和质心侧偏角是描述车辆动力学稳定性的最佳状态变量,所以ESP系统控制基本原理就是通过检测横摆角速度和质心侧偏角的实际值与名义值的差值来确定出车辆行驶的稳定程度,并通过对准稳定工况的动力学控制来阻止车辆进入不可控的非稳态工况。
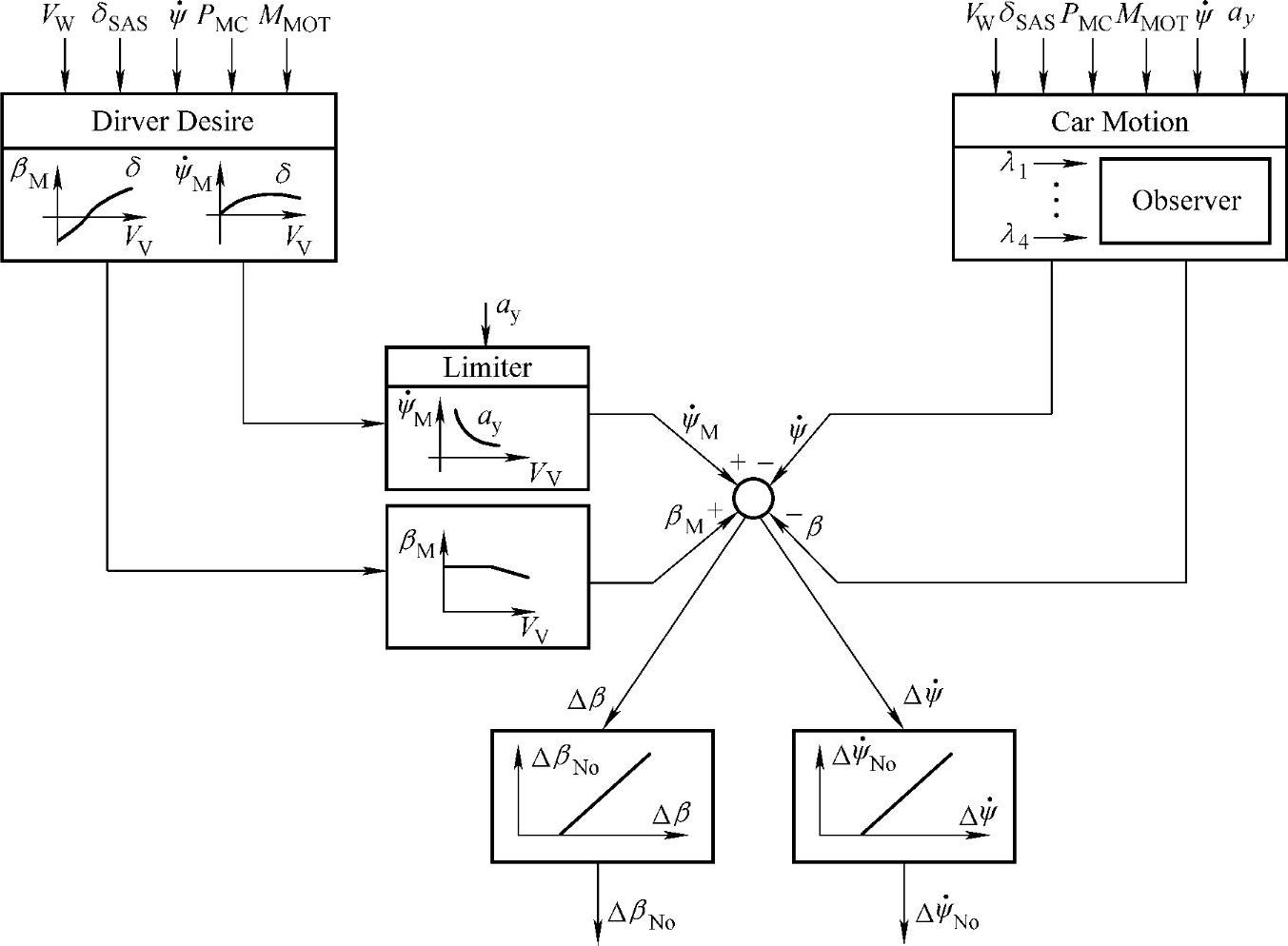
图1-20 车辆状态感知及操纵稳定性判定方法
当轮胎的侧偏特性进入非线性区后,车轮的侧向力不再与车轮的侧偏角呈线性关系,即实际侧向力与按线性车辆模型计算出的名义侧向力存在一定的偏差,从而导致实际横摆角速度与名义横摆角速度之间产生偏差Δγ,或实际侧偏角与名义侧偏角之间产生偏差Δβ,如图1-20所示。如果Δγ和Δβ的值均较小时,即认为车辆的行驶状态是稳定的,当该差值超出设定的范围时,则认为车辆已进入准稳定工况,需要对车辆进行动力学稳定性控制。
2.横摆力矩控制模块
ESP的主要功能就是在限制车辆质心侧偏角过大防止其激转的前提下,通过对车轮制动力和发动机输出转矩的调整,控制车辆的横摆角速度使其尽可能跟踪理想横摆角速度的变化。限制质心侧偏角过大的另一个重要目的在于确保车辆可以使用的横摆力矩增益足够大,从而能够通过控制四轮纵向滑移率的方式,有效影响车辆的横摆姿态。
通过车轮纵向滑移率调节车辆横摆力矩的一个重要理论基础,它来源于1.2节“车辆操纵稳定性动力学基础”中的轮胎附着圆理论。轮胎的纵向力和轮胎的侧向力受到轮胎的纵向滑移率、轮胎的侧偏角以及轮胎垂直载荷等因素的影响。对于给定的轮胎侧偏角,轮胎的侧向力将随着轮胎纵向滑移率的增大而减小,这种特性被用于控制车辆侧向力和横摆力矩,并以轮胎的滑移率作为控制算法的基本控制变量,如图1-21所示。
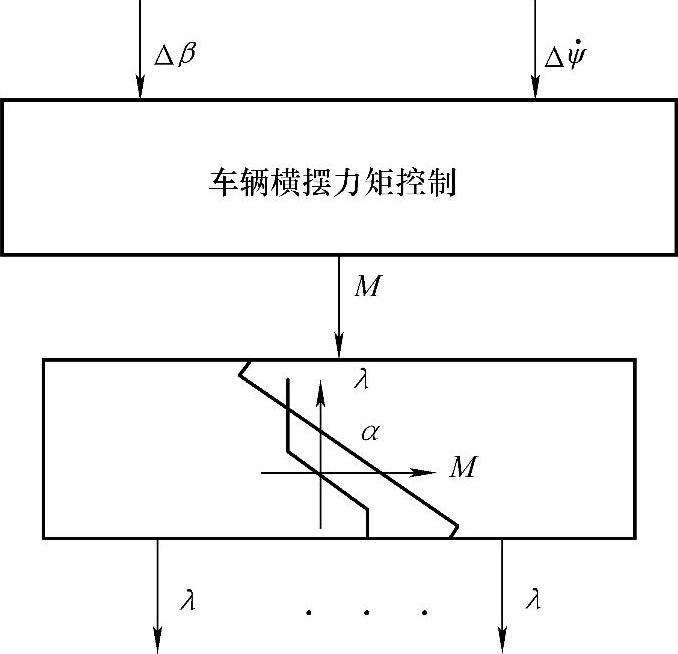
图1-21 基于四轮纵向滑移率的车辆横摆力矩控制方法
如图1-22所示,如果左前轮的滑移率(初始值为S0)增长了Δsx,假设轮胎的侧偏角α保持不变,则车辆横摆力矩ΔMyw的变化可由下式估算出
式中 lf——车辆前轴距;
b——车辆前轴轮距的1/2;
δf——前轮转角;
FS——左前轮侧向力;
FB——左前轮纵向制动力。
通过类似的推导过程,我们可以得到车辆各车轮合力对车辆横摆力矩的影响关系,如图1-23所示。
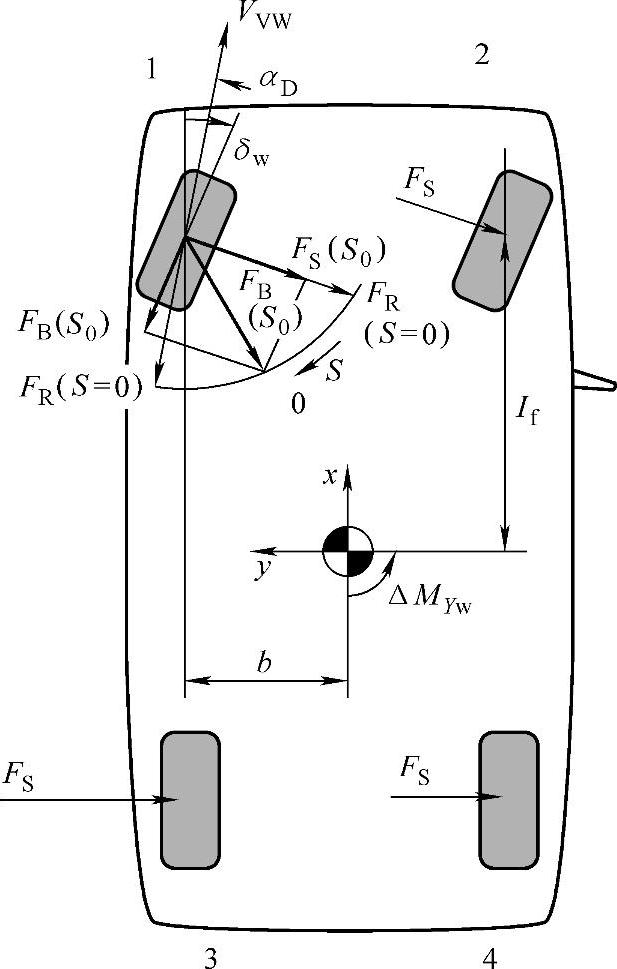
图1-22 左前轮轮胎合力对车辆横摆力矩的影响关系
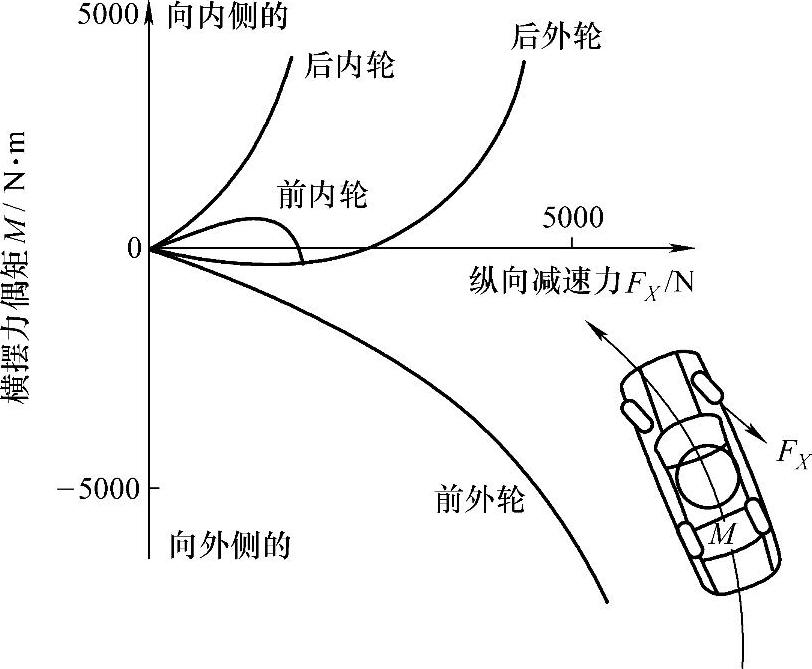
图1-23 各车轮纵向力分别对车辆横摆力矩的影响关系
进一步地,由于轮胎附着圆的影响,车轮合力对车辆横摆力矩的影响,可以解耦为车轮纵向力对车辆横摆力矩的影响和车轮侧向力对车辆横摆力矩的影响。又因为轮胎非线性特性,即轮胎纵向力与轮胎纵向滑移率、轮胎侧向力与轮胎纵向滑移率的非线性关系,轮胎纵向力、侧向力对车辆横摆力矩的影响,如图1-24所示,这就可以进一步地解释纵向滑移率对车辆横摆力矩的影响。
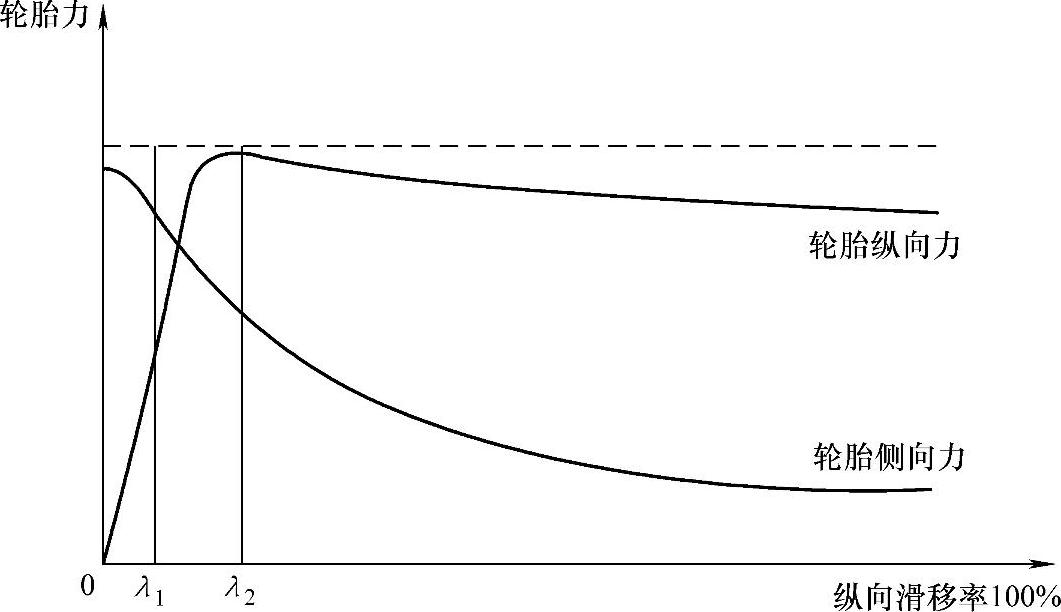
图1-24 轮胎纵向滑移率对轮胎纵/侧向力的影响
因此,通过改变轮胎纵向滑移率对控制车辆横摆力矩具有重要作用,通过滑移率控制模块将轮胎纵向滑移率控制到目标滑移率附近,就可以达到控制车辆横摆力矩的作用。
3.车轮滑移控制模块
车轮滑移控制模块的作用是将计算得到的各车轮的目标滑移率,转变为各车轮目标轮缸压力,通过改变轮缸压力的方法来控制制动器制动力矩,进而间接控制制动力,其输入输出信号示意图如图1-25所示。车轮滑移率控制模块的控制方法可以参见本书后面讨论ABS控制器中的相关章节,此处不进行详述。
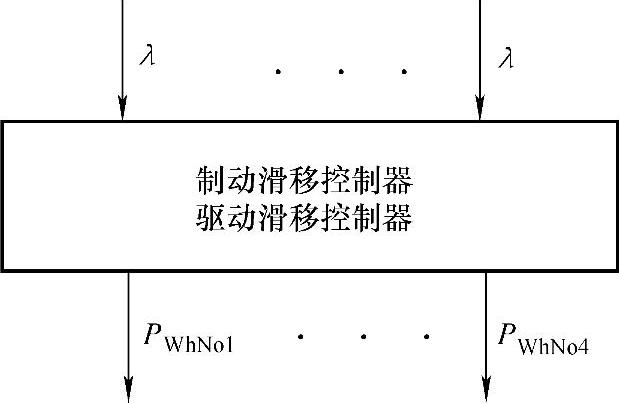
图1-25 滑移率控制模块的输入输出信号图
4.轮缸压力控制模块
车轮制动轮缸液压电磁控制阀包括进液阀和出液阀,每个阀通过PWM(脉冲宽度调制)控制其开闭状态,因此轮缸压力控制器的作用是将各车轮的目标轮缸压力转变为进液阀、出液阀的开闭时间,进一步地,将进液阀和出液阀的开闭时间转变为各电子阀的PWM控制电流指令,如图1-26所示。轮缸压力控制模块的控制方法同样可以参见后面ABS控制器相关章节,此处不进行详述。
5.大陆公司的软件架构
除了上述博世公司的ESP系统以外,较为典型的还有德国大陆公司的ESC系统,它采用的是模块式的控制架构,如图1-27所示。大陆公司ESC系统在已有的ABS和TCS功能模块的基础上又增添了两大功能模块,它们是主动横摆运动控制AYC(Active Yaw Control)和控制量仲裁功能模块。
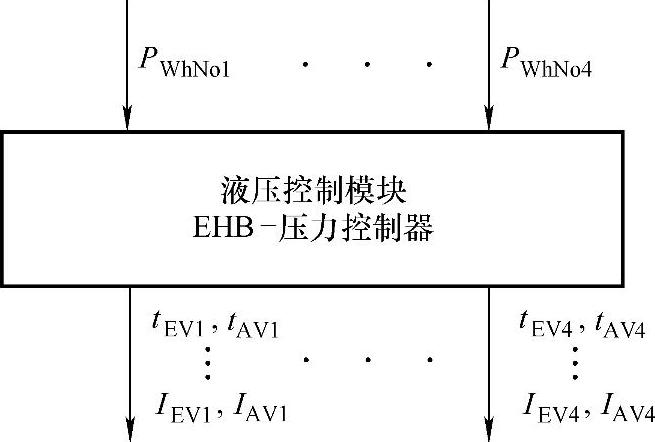
图1-26 轮缸压力控制模块的输入输出信号图
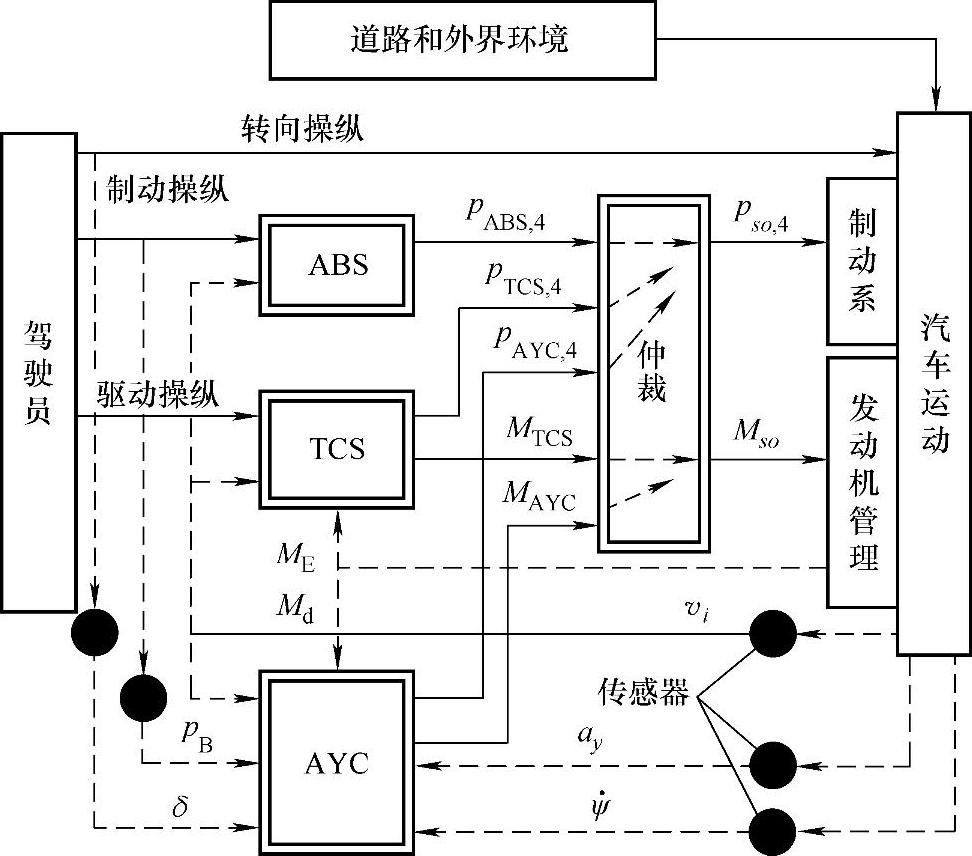
图1-27 大陆公司的模块式ESC控制架构
ABS功能模块只在驾驶人进行制动操纵时才起作用。ABS根据驾驶人的制动操纵量和4个轮速传感器所提供的轮速信息vi来判断车轮是否有制动抱死的趋向,按照其控制逻辑计算出对于ABS最佳的4个轮缸期望制动力pABS,4,然后将这4个期望制动力pABS,4传递给ESC的仲裁模块。
TCS功能模块只对驾驶人的驱动操纵起控制作用。其输入量是加速踏板,以及发动机的有关信息,如驾驶人期望转矩Md、发动机实际输出转矩ME、发动机转速nE等,以及4个轮速传感器所提供的轮速vi。TCS控制器根据这些输入量和固定的控制逻辑程序计算出所期望的发动机转矩MTCS和4个车轮相应的期望制动力pTCS,4,并将这些作为输出量也传送给控制量仲裁功能模块。
AYC功能模块要对驾驶人的所有操纵都起控制作用,用于保证汽车在任何工况下都具有良好的方向稳定性和转向性能。AYC模块的输入量是驾驶人操纵的转向盘转角δ,主缸制动力pB和对发动机的期望转矩Md,以及由传感器所测量的汽车实际运动变量:汽车横摆角速度、横向加速度ay、4个车轮的转速vi和发动机实际输出转矩ME。AYC模块应用一系列数学模型和控制逻辑,计算出让汽车获得最佳操纵稳定性能时所期望的发动机转矩MAYC以及4个车轮的期望制动力pAYC,4。
控制量仲裁功能模块在优先考虑汽车主动安全性的基础上,同时兼顾汽车的驾驶乐趣性和舒适性,对来自不同控制模块的控制量进行比较、协调和仲裁,最后计算出ESC的干预量:发动机的期望转矩Md和4个车轮的期望制动力,并将它们分别传递给其控制器执行机构——发动机管理系统和ESC制动力调节器。发动机管理系统将对节气门开度和点火时间进行相应地调整和控制,以改变其输出转矩。ESC制动力调节器通过对液压电磁阀的控制来获得相应的轮缸制动力。发动机输出转矩和轮缸制动力的变化又直接影响汽车的运动状况,从而形成一个多功能模块的闭环控制系统。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。