



为了方便描述汽车的操纵稳定性,我们首先建立最简单的描述整车操纵稳定性的二自由度动力学模型。
车辆的主要运动形式是用固结于运动着的汽车上的动坐标系——车辆坐标系来描述的。目前,国际上常用的车辆坐标系有SAE坐标系和ISO坐标系。本书采用ISO坐标系。车辆坐标系的原点O固定在车辆质心的横截平面与车辆侧倾中心轴线的交点上。车辆坐标系的纵轴x平行于地面,正方向指向车辆前进方向;z轴的正方向垂直于地面向上;y轴的正方向根据右手法则确定,即车辆前进方向的左侧为正方向。将车辆固结于汽车的车辆坐标系,如图1-8所示。分析时令车辆的质心与车辆坐标系的原点重合,对简化的线性二自由度汽车模型进行研究。
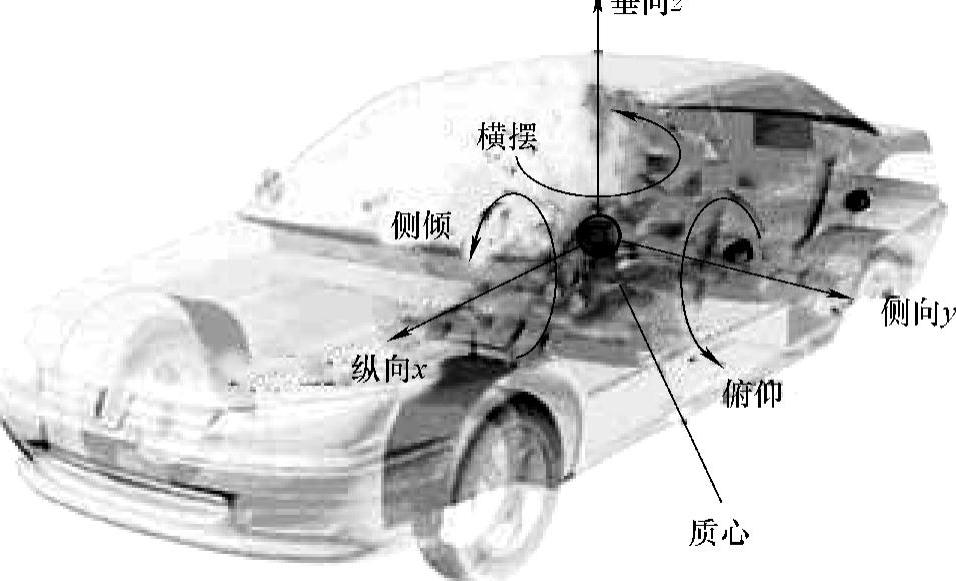
图1-8 车辆坐标系
进一步地,为了突出车辆操纵稳定性的描述,我们进行下述简化:
1)忽略转向系统的作用,直接以前轮转角作为输入。
2)忽略悬架的作用,认为车体只作平行于地面的平面运动(汽车沿z轴的位移、绕y轴的俯仰角与绕x轴的侧倾角均为零)。
3)汽车的侧向加速度限定在0.4g以下,轮胎侧偏特性处于线性范围,因此可以只采用线性轮胎侧偏模型。
4)忽略转弯过程中载荷转移对左右车轮侧偏特性的影响。
5)忽略空气动力学的作用。
这样,我们就把一辆转弯过程中的汽车简化为一个装备有前后两个线性弹性橡胶轮胎的、只具有横向和横摆两个运动自由度的自行车模型,简称线性单轨二自由度车辆模型,如图1-9所示。
根据这个线性单轨二自由度车辆模型,我们可以推导出其两个方向自由度的动力学原理方程,如下列各式所示

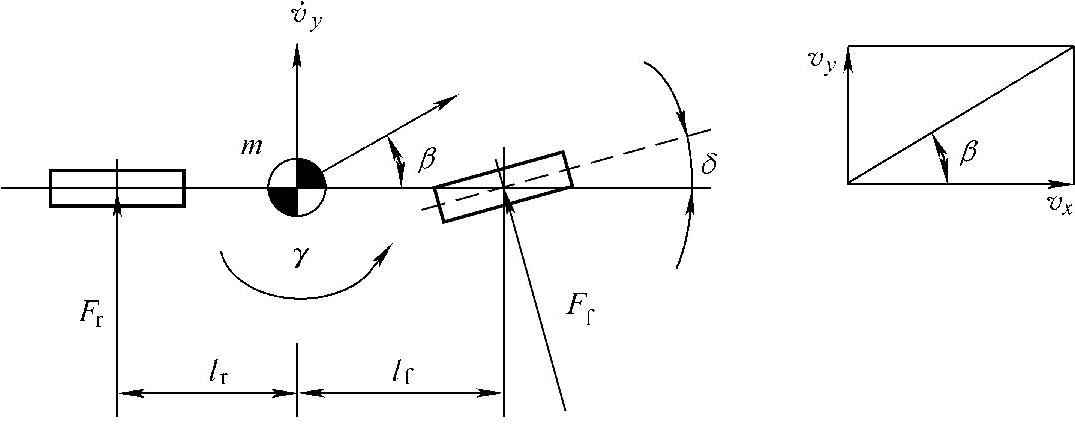
图1-9 线性单轨二自由度模型(https://www.xing528.com)

在这个联立微分方程组中,包含了汽车转弯过程中的关键横向运动信息:质心侧偏角和横摆角速度;汽车本征关键参数信息:车身质量和前后轮侧偏刚度。因此,本方程组可以描述汽车转弯过程中的主要操纵稳定性特征。
需要进一步说明的是,车辆质心侧偏角被定义为车辆行驶速度方向与车辆纵轴之间的夹角,如图1-10所示,数值上可以表达为横向车速与纵向车速比值的反正切值,它的数值大小代表了车辆行驶稳定性的程度。横摆角速度则是指车辆转弯过程中,车身绕z轴旋转的角速度,它的数值大小反映了车辆当前转弯姿态变化的速率。车辆的质心侧偏角和横摆角速度作为描述车辆转弯行驶姿态、表征车辆转向操纵性和行驶稳定性的关键参数,在ESC系统中起到了至关重要的作用,这一点将在下面章节中ESC的结构原理部分做详细阐述。
这里所讲的汽车操纵稳定性特征,是指在圆周行驶过程中汽车出现的不足转向、中性转向和过多转向的稳态或准稳态响应特性。汽车的“等速圆周行驶”稳态响应,称为汽车的“稳态转向特性”。在圆周行驶时,驾驶人使转向盘保持一个固定的转角,并控制汽车的车速缓慢增加。若随着行驶车速不断升高,汽车的转向半径R逐渐增大,我们就称这种汽车具有不足转向特性。若汽车的转向半径R不随车速的增加而变化,就称这种汽车具有中性转向特性。若汽车的转向半径随车速的升高愈来愈小,则具有过多转向特性。现代汽车设计过程中,通常会使汽车具有适度的不足转向特性,这样汽车具有较好的转向操纵性,以及良好的行驶稳定性。
当汽车处于稳态转向过程中,汽车横向车速的变化率 和横摆角速度的变化率
和横摆角速度的变化率 均等于零,因此,代入单轨二自由度车辆模型的联立微分方程组中,即可得到汽车转向灵敏度(也称稳态横摆角速度增益)的表达式
均等于零,因此,代入单轨二自由度车辆模型的联立微分方程组中,即可得到汽车转向灵敏度(也称稳态横摆角速度增益)的表达式

式中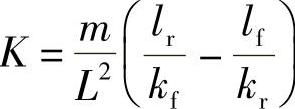 ,称为稳定性因数(s2/m2),是一个表征汽车稳态响应的重要指标。
,称为稳定性因数(s2/m2),是一个表征汽车稳态响应的重要指标。
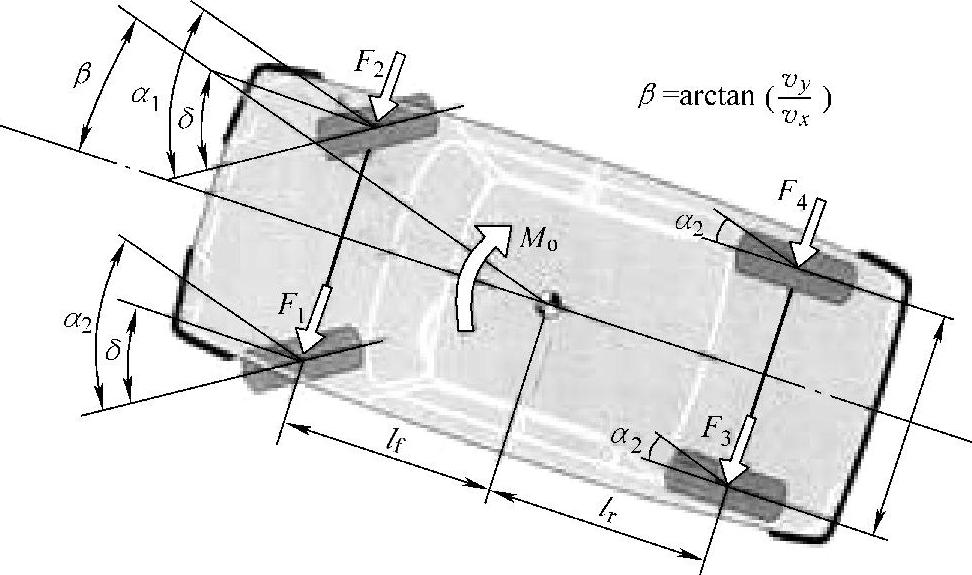
图1-10 车辆质心侧偏角定义
对于中性转向特性的车辆,其K值恰好等于零,因此, ,可以看出汽车横摆角速度增益将随着车速的增大而线性增加,这个关系恰好等于汽车轮胎无侧偏角时的转向关系,如图1-11所示。
,可以看出汽车横摆角速度增益将随着车速的增大而线性增加,这个关系恰好等于汽车轮胎无侧偏角时的转向关系,如图1-11所示。
对于不足转向特性的车辆,K是大于零的,式(1.4)分母大于1,横摆角速度增益比中性转向时小,即前轮转过相同的角度,汽车横摆角速度γ要小些,并且随着车速ua的增加,其汽车横摆角速度增益增加速度逐渐降低, 是一条低于中性转向汽车稳态响应线,后来又向下弯曲的曲线。且可以证明,当车速增大到uch=1/K时,汽车的横摆角速度增益达到最大值,约为
是一条低于中性转向汽车稳态响应线,后来又向下弯曲的曲线。且可以证明,当车速增大到uch=1/K时,汽车的横摆角速度增益达到最大值,约为 ,当车速继续增大并超过uch时,汽车横摆角速度增益就会降低。因此,称uch为不足转向汽车的特征车速。这个车速将在ESC的控制和匹配开发中起到重要的作用。
,当车速继续增大并超过uch时,汽车横摆角速度增益就会降低。因此,称uch为不足转向汽车的特征车速。这个车速将在ESC的控制和匹配开发中起到重要的作用。
对于过多转向特性的车辆,K是小于零的,横摆角速度增益比中性转向时大,即前轮转过相同的角度,汽车横摆角速度γ要大,且会随着车速的增加而迅速增大, 曲线向上弯曲。当车速增大到
曲线向上弯曲。当车速增大到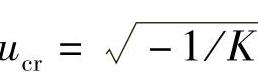 时,汽车的横摆角速度增益快速增大并趋于无穷大,此时,只要前轮产生一个极其微小的转角波动,车辆将会出现激转失控。因此,ucr为过多转向汽车的临界车速。
时,汽车的横摆角速度增益快速增大并趋于无穷大,此时,只要前轮产生一个极其微小的转角波动,车辆将会出现激转失控。因此,ucr为过多转向汽车的临界车速。
图1-11 汽车的稳态横摆增益曲线
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。