



可以将转向盘摆振看成是车轴和车轮耦合运动的结果。图20-9中各符号的意义为:
I0:车轮转动惯性矩。
I1:围绕主销的车轮惯性矩。
Ie:前车轴惯性矩在通过车轴中点,且与车辆前进方向平行的水平轴上的当量惯性矩。
2πn:车轮角速度。
2πnI0:车轮转动动量。
车轮转动惯量在承受颤振角速度 作用下,就向旋转中的陀螺一样,即使其轴线水平,只要有一端支撑,陀螺的轴线依然可以缓慢地围绕垂直轴运动,这种运动可用
作用下,就向旋转中的陀螺一样,即使其轴线水平,只要有一端支撑,陀螺的轴线依然可以缓慢地围绕垂直轴运动,这种运动可用 来表示。
来表示。
如图20-9所示,相互面对的左右车轮分别产生摆角θ1和θ2,这就是车轮无规则跳动的摆角。相对于跳动角θ2的复原力矩,由于拉杆弹力ce的作用,首先可以被看成等于cel2eθ,接下来再考虑到左右跳动角并不相等,必须考虑到转向垂臂(Pitman arm)弹性力cs的影响。所以,第二个可以考虑的结果是,可以将因此引起的复原力矩看成等于csl2s(θ1-θ2)。

图20-9 转向盘摆振与陀螺作用的耦合
此外,由于轮胎胎面的摩擦力直接作用在车轮上,在这个摩擦力的作用下,将引起复原力矩μθ1。与μ有关的复原力矩系数中,存在两种成分:其一是与车轮转速成2次方关系的项,另一个是与转速无关的项。也就是:
μ=μ0+μ1(2πn)2(20-15)
这样,对于左侧车轮来说,其运动方程式为

对于右侧车轮来说,由于没有拉杆的弹性影响,下述的运动方程式成立。

如上所述,车轮跳动引起振动,振动又引起了陀螺作用力矩,以及轮胎与悬架的复原力矩,两种作用力矩组成了相对于车轴的复原力矩。因而,其运动方程可由下式表达。

其中,λ=c1a2+c2s2,c1和c2分别是悬架和轮胎的弹性系数。此外,s和a如图20-9所示,分别表示为,两车轮之间的轮距和左右悬架弹簧的中心距离。
若假设连杆和拉臂的刚度相当高,则有cs=0,c1=0。又假设θ1=θ2=θ,则式(20-16)和式(20-17)将成为同一形式,结果变成如下两个运动方程式。也就是说,相对于转向机构的振动, ,
,

相对于车轴的振动,

为了求解上式,设陀螺作用有90°相位差,则有下式。
θ=θ0cosωt及ϕ=ϕ0sinωt将两个方程式组合在一起,则有

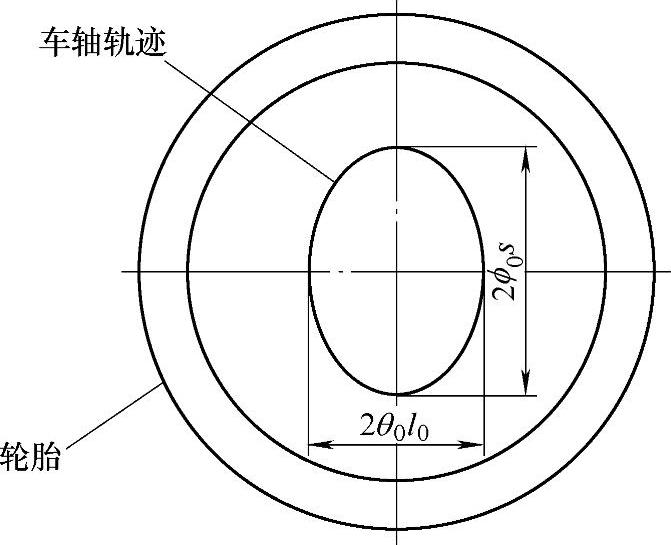
图20-10 车轮运动轨迹
因此,车轴中心的轨迹为椭圆。假设,l0为主销到车轮中心的距离,s为车辙间距,如图20-10所示,这个椭圆的长轴和短轴分别为2ϕ0s和2θ0l0。
接下来,将式(20-21)的关系代入到式(20-19)和式(20-20)中,可以获得如下条件。

将上式中的θ0和ϕ0消去,则可以得到下式。

上式的根分别为ω12和ω22,共计两项,通常是实数根,并且都取正值。(https://www.xing528.com)
当然,只要车轮不旋转,就不会产生陀螺作用。若此时车轮依然产生颤振和无规则跳动,假设其圆周振动频率分别为ωw,ωe,由于此时2πn为0,将n=0代入到式(20-19)和式(20-20)中,可以得到下式。

上述方程式的解如下所示。

这时,由式(20-15)可知,μ=μ0。
只要车轮不旋转,式(20-23)中的ω就不应该等于ωw和ωe。实际上,由于在车轮旋转过程中承受陀螺作用,ω值也和ωw与ωe很相近,尽管相近,依然会多少有一些差别。假设, ,将这些假设值代入到式(20-23)中,经过换算,可以得到下式。
,将这些假设值代入到式(20-23)中,经过换算,可以得到下式。

上式左边第1项和第2项相比小得多,可以省略掉,由此可以推导出下式。

同样方法,可以推导出下式。

将上述结果汇总成下式。
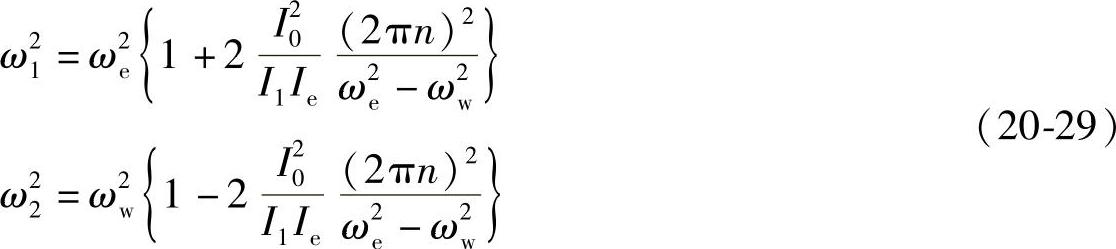
由上述结果可知,假设这种耦合振动的频率较高时设为ω1,频率较低时设为ω2,在耦合振动频率较高时,ω1比车轮没有旋转的颤振频率ωe还大。耦合振动频率较低时,ω2比车轮的无规则跳动频率ωw还低。
下面再讨论一下摆动角比率。由式(20-22)可知,

假设,上式中ω=ωe,这相当于出现车轮颤振,则有

同样,

在该式中,若ω=ωw,这相当于出现了车轮无规则跳动,则有

由上述结果可知,ρ和ρ′经常符号相反。
下面再讨论一下强迫振动。
对于强迫振动,只要在式(20-1)、式(20-2)的右边,加入强迫振动的强制转矩项即可。如上所述,所加的强制转矩周期(频率),必然和上述某一个耦合自激振动周期(频率)相等,因而引起共振,产生明显的振动感觉。
现以一个特殊状态为例,例如假设ωe=ωw。可由式(20-23)得到下式。

其中,为求解振幅比,对于车轮的颤振,将式(20-34)的关系代入到式(20-31)中,可得

对于车轮无规则跳动,可将式(20-34)的关系代入到式(20-33)中,可得

对于像这种随车辆行驶速度而产生的强制外力,应当用车轮转速的周期来观察更为妥当。因而,用式(20-29)求得的两个圆周振动频率ω1和ω2除以2π求得相对应的转速,若车辆前轮转速和这个转速一致时,将引起共振。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。