



驱动系统可以简化为图1--16所示的8自由度模型。
动力总成如图1--17所示,分为发动机本体和变速器两部分,分别以刚体模拟,二者之间用等价弯曲刚度单元连接,其前后端也都通过弹性单元支撑。传动轴的两端为单纯支撑,其重量集中在重心G3处,如图16-18所示。后桥总成视为刚体,通过板簧连接到车身,并最终通过轮胎与地面接触。因此,板簧可以分为前半部分和后半部分,重量集中在各自的重心位置G5、G6处,系统的自由度包括重心G1~G6的上下方向运动和重心G1、G2、G4的俯仰运动,发动机本体和变速器壳体之间的结合可以去除一个自由度,共计8个自由度。
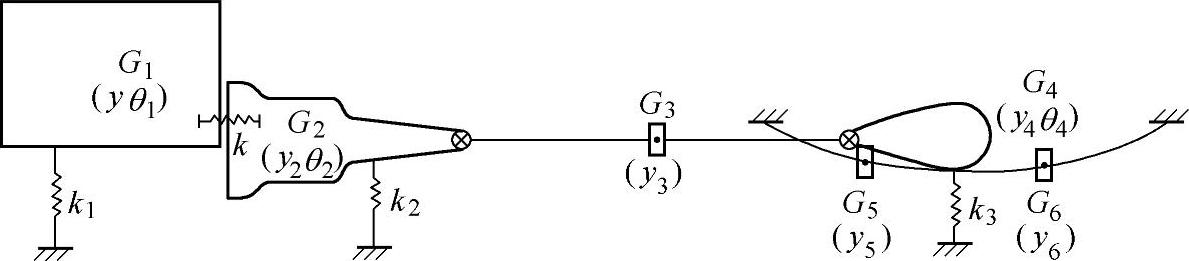
图16-16 驱动系统分析模型
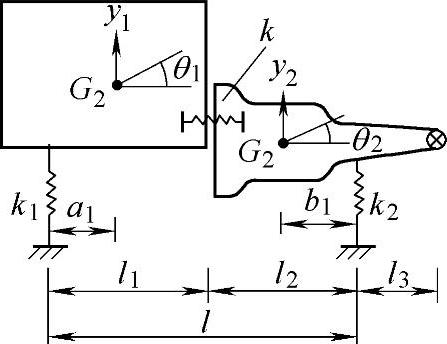
图16-17 动力总成模型
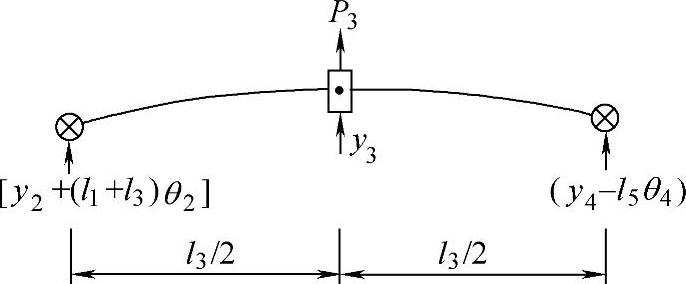
图16-18 传动轴计算模型
动力总成的变形能UE和动能TE可以用下式求得:

发动机本体和变速器壳体的结合条件如下式所示,据此可以去除一个自由度。
y1+(l1-a1)θ1=y2-(l2-b1)θ2(16-3)在传动轴的重心G3处施加P3外力,则传动轴的变形能可按式(16-4)求得。

重心G3的位移为

从式(16-4)、式(16-5)可将P3消去,传动轴的变形能变为

另外,传动轴的动能Tp可按下式求出:

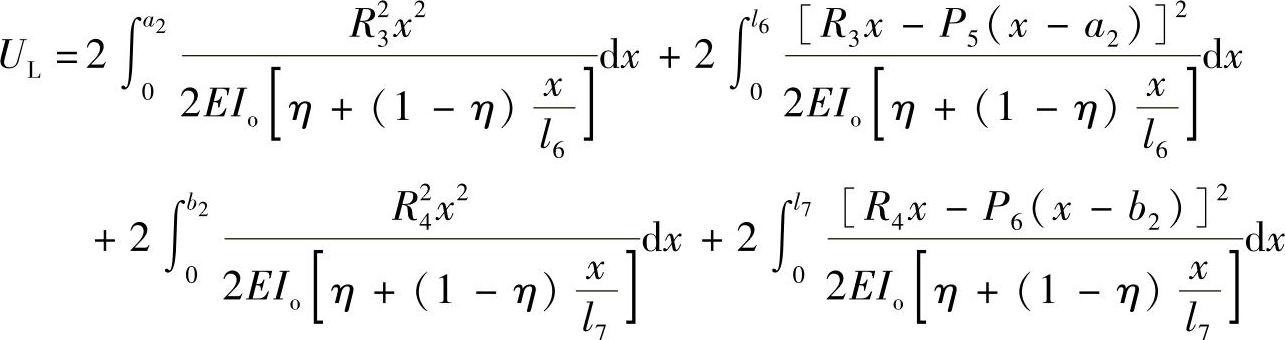
接下来,后桥总成、板簧、轮胎的变形能和动能也可以求出。如图16-19所示,在重心G4、G5、G6处施加外力P4、P5、P6,重心G4处施加力矩M4,将板簧如图16-20所示展开分析,两根板簧的变形能UL则为
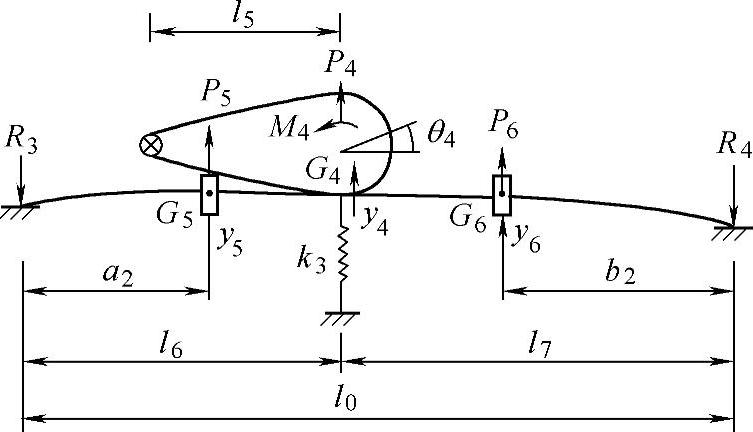
图16-19 后桥总成分析模型
图16-20 板簧展开模型
 (https://www.xing528.com)
(https://www.xing528.com)
也可以表达为

式中,R3、R4为板簧的前后支持反力。

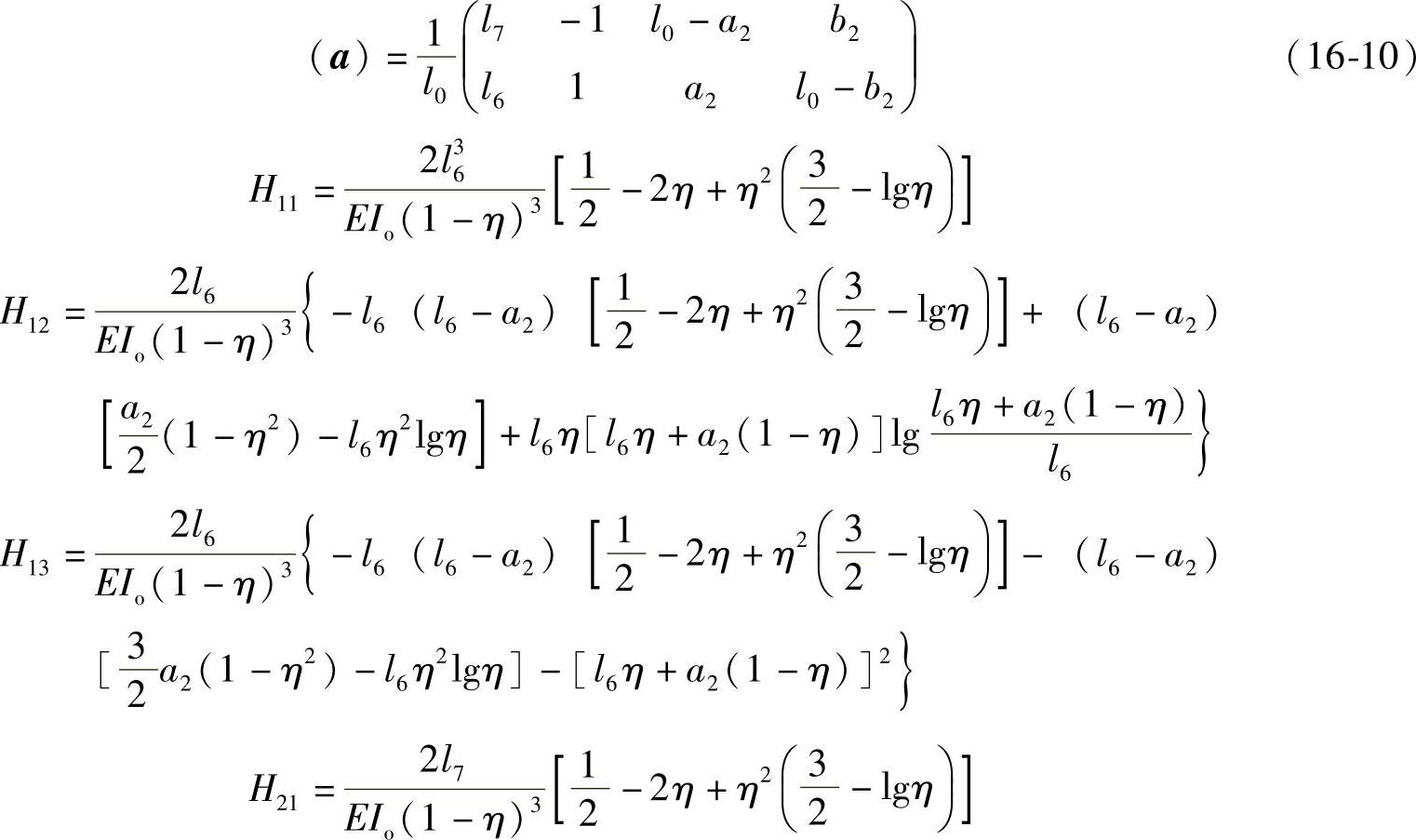
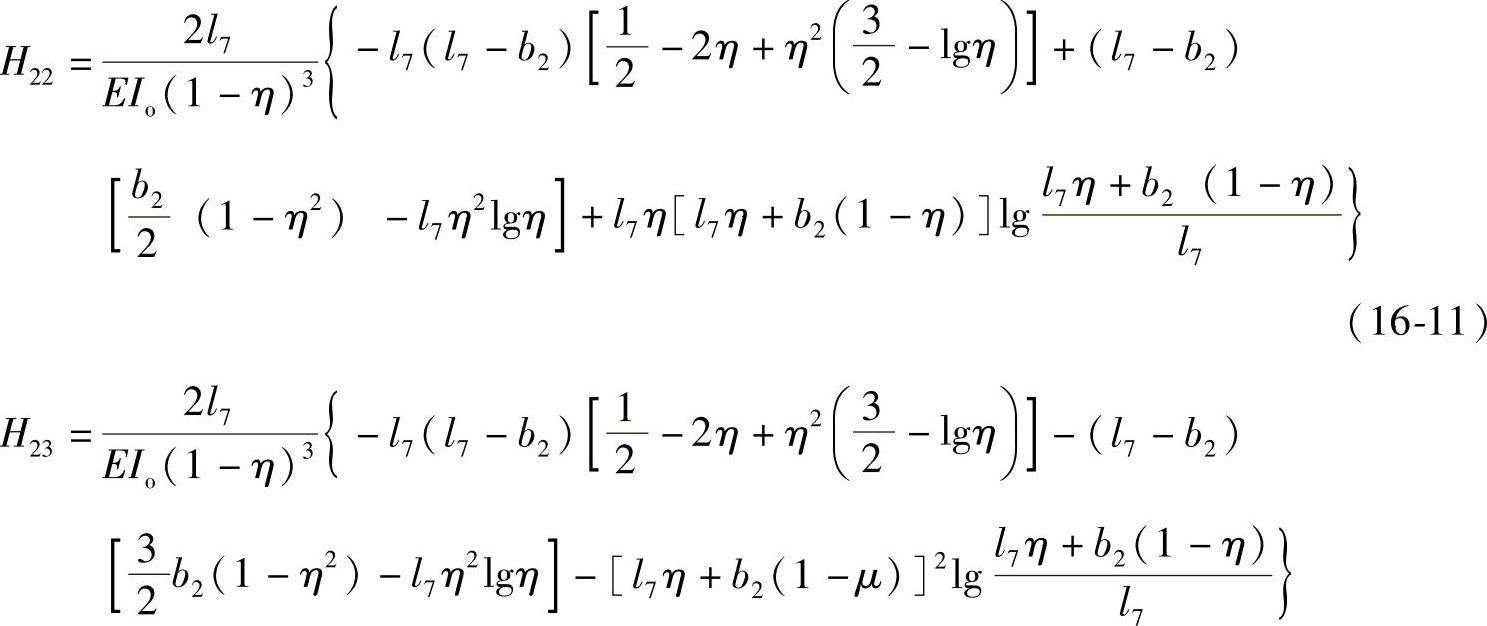
式(16-9)中,
此时,对重心G4、G5、G6位移及重心G4角位移按Castigliano定理整理后得
也可以表达为

式中,
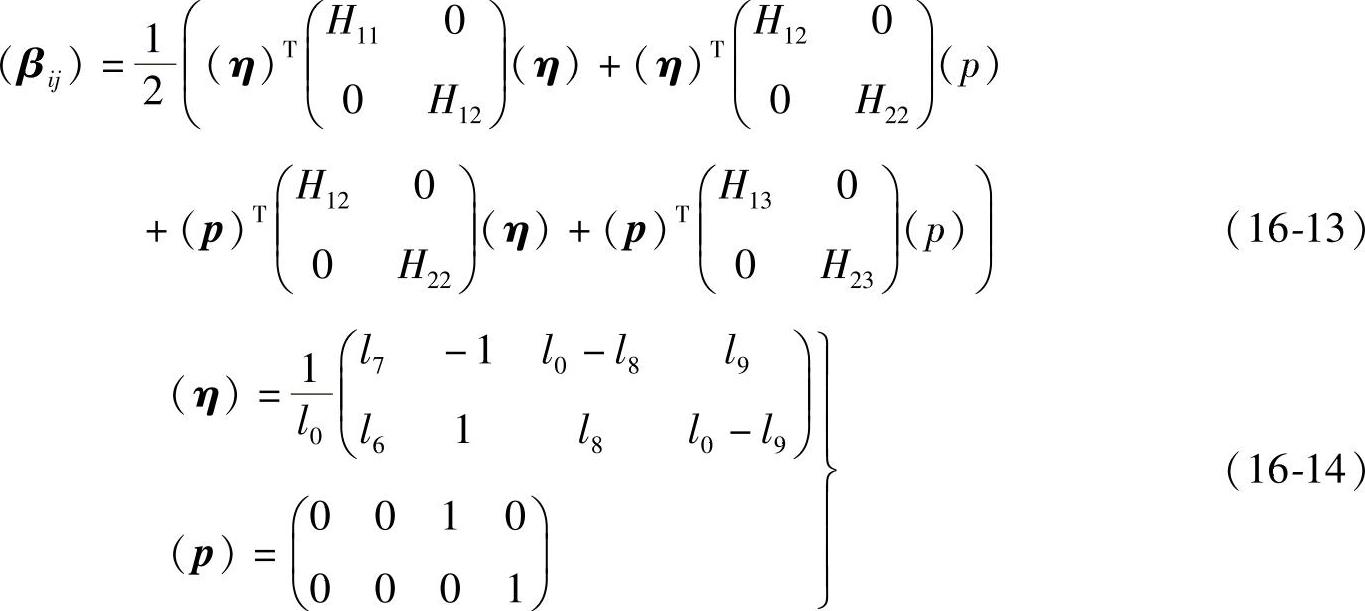
(η)T、(p)T为(η)、(p)的翻转矩阵。
从式(16-12)可以知道P4、P5、P6、M4有如下的关系:

其中(δij)、(βij)互为逆矩阵,即
(δij)=(βij)-1(16-16)从以上的结果可以推出,两根板簧的变形能UL可以用位移y4 y5 y6 θ4表达:
UL=UL(y4,y5,y6,θ4)(16-17)而两个轮胎的变形能可以表达为
UT=k3y24(16-18)后桥总成、板簧的动能TL可以用下式求得:

基于以上分析结果,驱动系统整体的弯曲变形能U和动能T可表达为

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。