



1.分析模型
众所周知,引起自激振动的摩擦特性是与速度相关的,但是关于摩擦系数一定时耦合系统的自激振动方面的报告却很少。本文考虑模拟制动系统的简单的2自由度模型,根据复数模态分析,首先对耦合系统的自激振动进行定性分析。其次在自激系统上使用动态减振器,对减振效果进行论证。
图11-6为分析用的模型。不考虑减衰时的运动方程式见式(11-2)。式中的第2项为刚度行列式,其非对角项为非对称数值。对该式进行复数固有值分析,式(11-3)为解的形式。
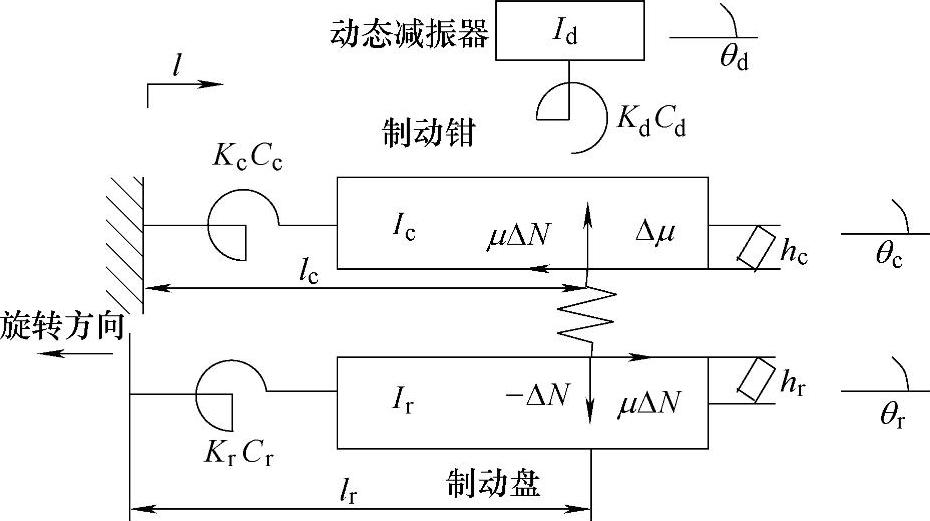
图11-6 2自由度分析模型

复数固有值
λ=λR+j2πfn(11-3)
式中,λR为复数固有值的实部(1/s);fn为耦合固有振动频率(Hz); 。
。
复数固有值的实部λR为负数时,振动是减衰的,正数时是发散的,此时的耦合振动频率fn与啸叫频率相对应。另外,λR的值越大,则振动能量的发散也越大,因此,可以用λR作为啸叫的评价指标(下面称其为啸叫容易度指数)。
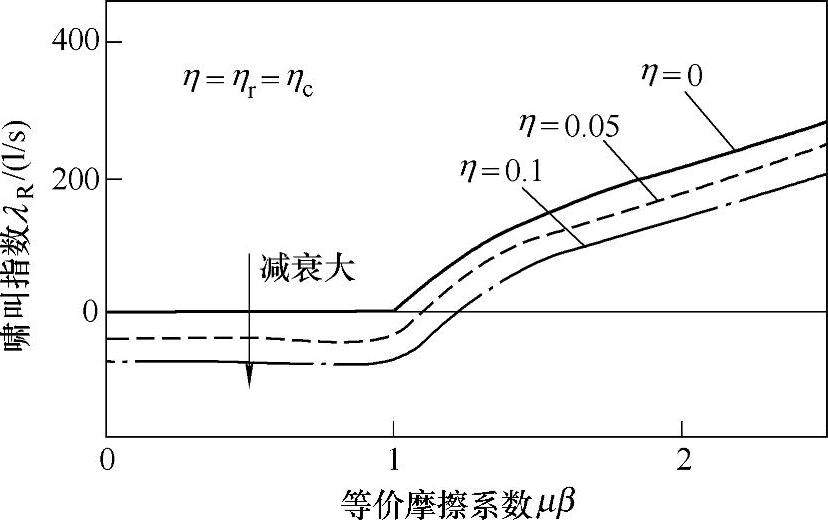
图11-7 减衰的影响
①制动盘、制动钳构成的2自由度模型。如图11-7所示,横坐标为考虑形状的等价摩擦系数μβ,纵坐标为λR,图中显示的是当μβ增加时,不同减衰指数Cr、Cc时的λR变化情况。
损失系数

利用上式进行整理后,当η增加时如果λR>0,则μβ的值也是增加的。也就是说系统的减衰对啸叫是起抑制作用的。当μβr,c=±2.0时,制动盘与制动钳的固有模态的比fr/fc和λR的关系如图11-8所示。从图中可知,当制动盘和制动钳的旋转中心偏左(μβr,c=+2.0)时,由于fr/fc>1,存在啸叫发生的领域,并且当惯性矩的比Ir/Ic增加时,该领域扩大。相反,当制动盘和制动钳的旋转中心偏右(μβr,c=-2.0)时,由于fr/fc<1,存在啸叫发生的领域,并且当惯性矩的比Ir/Ic增加时,该领域有缩小的倾向。根据以上分析,可以知道制动盘和制动钳的模态对啸叫是有影响的。
虽然过去多是以固有值之比来讨论啸叫问题,但从以上分析可以知道,模态及惯性矩的比也有着相当大的影响。
②追加动态减振器。如图11-9所示,对动态减振器的固有振动频率fd和啸叫容易度指数的关系进行了研究。图中的箭头表示耦合后的固有振动频率,ηd可以按照下式求得:

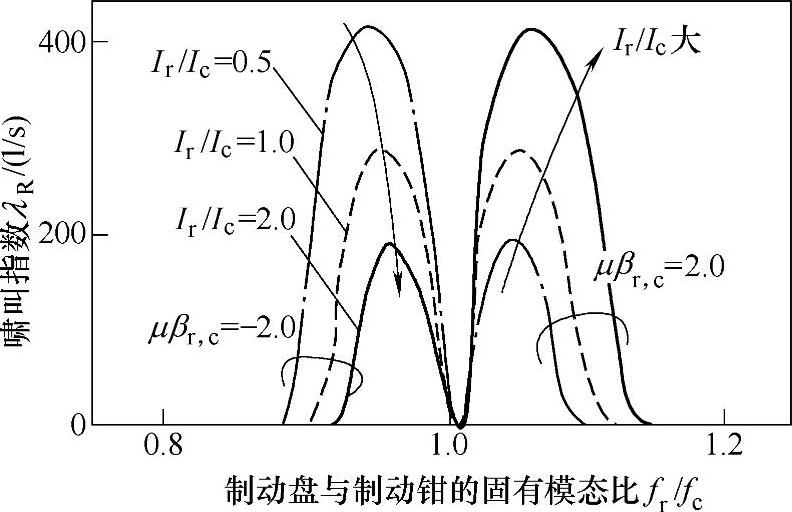
图11-8 固有频率的影响
把fd设定为比耦合固有振动频率fn高5%左右时能得到最佳的改善效果。另外,与强制振动不同的是自激振动的减衰较小时制振效果更好。而当动态减振器的惯性矩较大时,λR≤0的频率范围更宽。
基于以上分析结果,可以得到以下的改进方向和注意点:
●制动盘或者制动钳的减衰尽量大。
●动态减振器的固有振动频率fd要比耦合固有振动频率fn稍高一些,减衰稍小一些。
●不能仅仅以固有值的比来分析啸叫问题,还要考虑振动模态和惯性矩之比。
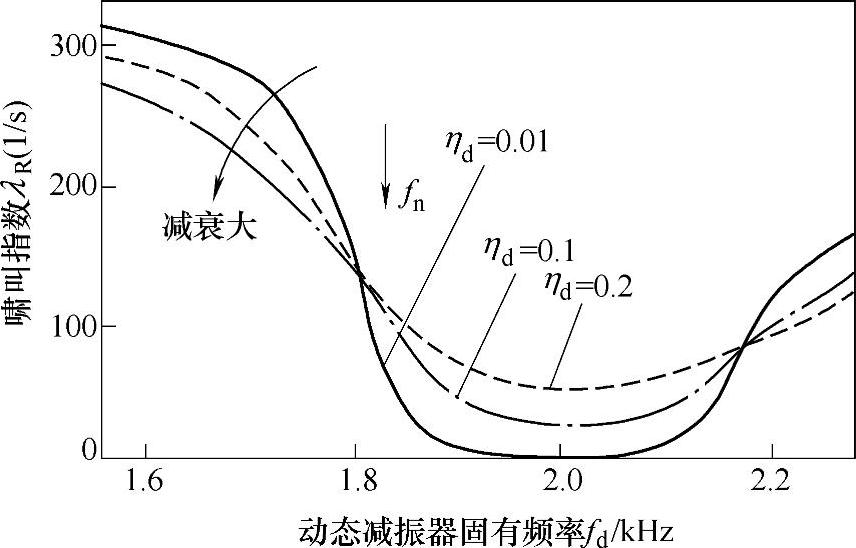
图11-9 减衰的影响
2.FEM分析
通过FEM分析可以为解决制动啸叫问题提供方向性的建议。但是,由于制动系统结构复杂,具体的结构状态很难用FEM模型真实地模拟出来。(https://www.xing528.com)
当前,有限元法是忠实反映制动系统动态特性(刚度、固有频率)的最为有效的方法。因此,为了定量掌握各个参数与制动啸叫问题的关系,本文介绍一种新近开发的根据FEM方法来求解制动系统的固有模态。
(1)FEM法复数固有频率分析 为了能够用FEM方法表现线性的摩擦振动,必须进行复数固有模态分析,而在这之前需要解决以下几个事项:
①利用FEM方法体现摩擦力,现存的单元不适用于非对称行列式。
②计算的实用性,分析用的模型如果超过50000自由度,计算时间、内存消耗巨大。
对于第①项的解决方法,如同式(11-6)中的第3项,在结构全体刚度矩阵中追加式(11-7)中的接触刚度矩阵。产生的摩擦力等于制动盘面垂直方向的刚度矩阵乘以摩擦系数,这样就实现了制动盘和衬垫之间真实刚度矩阵的定义。

式中的Kp是定义制动盘和制动钳运动副之间接触的刚度矩阵:
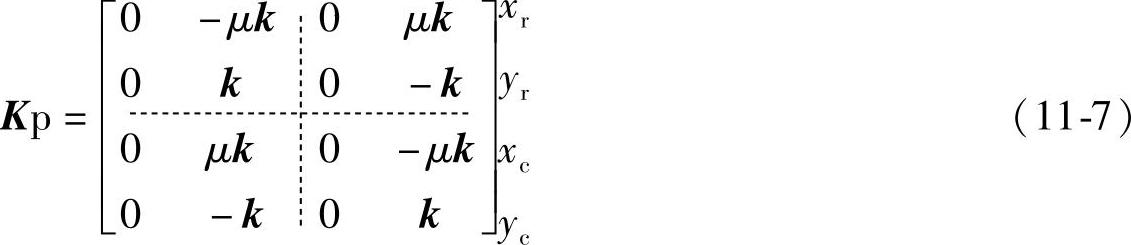
式中,x为摩擦力的发生方向;y为制动盘面的垂直方向;k为衬垫摩擦材料的制动盘面垂直方向的刚度矩阵。
对于第②项,导入部分结构合成法。对制动系统、制动钳系统分别进行模型变换,分析自由度缩小为原来的1/1000。使用超级计算机进行复数固有模态分析时需要几个小时,经过模型变换后,仅需要1min即可完成计算。
另外,随着现代电子技术的飞速发展,计算机的性能有了巨大的进步,软件方面也得到了快速的发展。即使不使用模型转换,利用高性能配置的计算机和软件,也可以在短时间内得到模态的解。
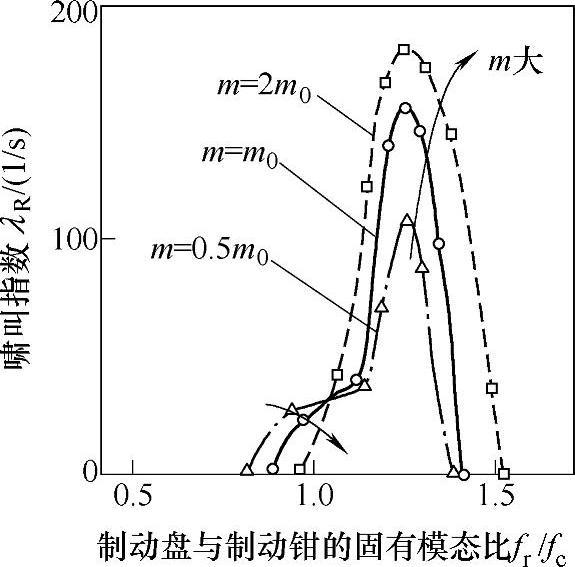
图11-10 动态减振器的影响
(2)计算结果 最初,制动钳的结构未进行任何变更,仅对制动盘的刚度、质量加以调整,对制动盘与制动钳固有频率的比值fr/fc与制动啸叫容易度指数λR之间的关系加以调查。需要关注的固有频率比,是制动钳的扭转模态和制动盘的3阶直径方向模态这二者之间的比值。
图11-10是仅变更制动盘的模态刚度以调整固有频率的比时,将制动盘的模态质量调整为2倍和0.5倍时的计算结果。
图11-11为制动系统各零部件的模态分布,以及与制动噪声之间的对应关系。其中比较典型的有制动蹄的扭转和弯曲模态、制动鼓的径向弯曲模态。图11-12为制动鼓的径向弯曲模态与制动噪声时间领域测试结果的对应关系。曲线中的峰值A或者谷值B与制动鼓的模态是对应的。
同计算模型的结果相同,FEM分析模型中也显示存在λR>0领域,在固有频率比为1.25附近存在峰值。另外,当制动盘的模态质量增减时λR的绝对值也有变化的倾向。计算模型的固有频率比以1.0为边界条件,因模态的不同,λR>0的领域分为两部分,而FEM模型却是在固有频率比0.8~1.4的范围内连续为正值。这是由于FEM模型在该范围内的固有值之比,造成前述的两个模态连续变化。总的来说,FEM模型与计算模型不同,它可以体现模态及质量比的变化倾向。图11-10的分析结果证明了当固有值比为1.0时,相对于模态质量的增减,λR绝对值的增加倾向具有明显的转折点。
其次,对动态减振器的效果进行详细的论证。
图11-13为将动态减振器安装在制动钳外拖臂一侧时的减振器固有值fd和啸叫容易度指数λR之间的关系。图中箭头指的是未安装动态减振器时的啸叫频率fn。
当动态减振器的质量为10g时,使λR<0的固有值领域几乎不存在。而当动态减振器的质量增加到30g时,λR<0的领域扩大到fd=1.80~2.05kHz。
通过以上分析可以得到这样的结论:将动态减振器的固有值fd设成高于未安装时的啸叫频率fn,就能得到很好的制振效果。如果动态减振器的固有值fd设成低于未安装时的啸叫频率fn,就会出现啸叫容易度指数λR增加的领域,这一点需要特别注意。
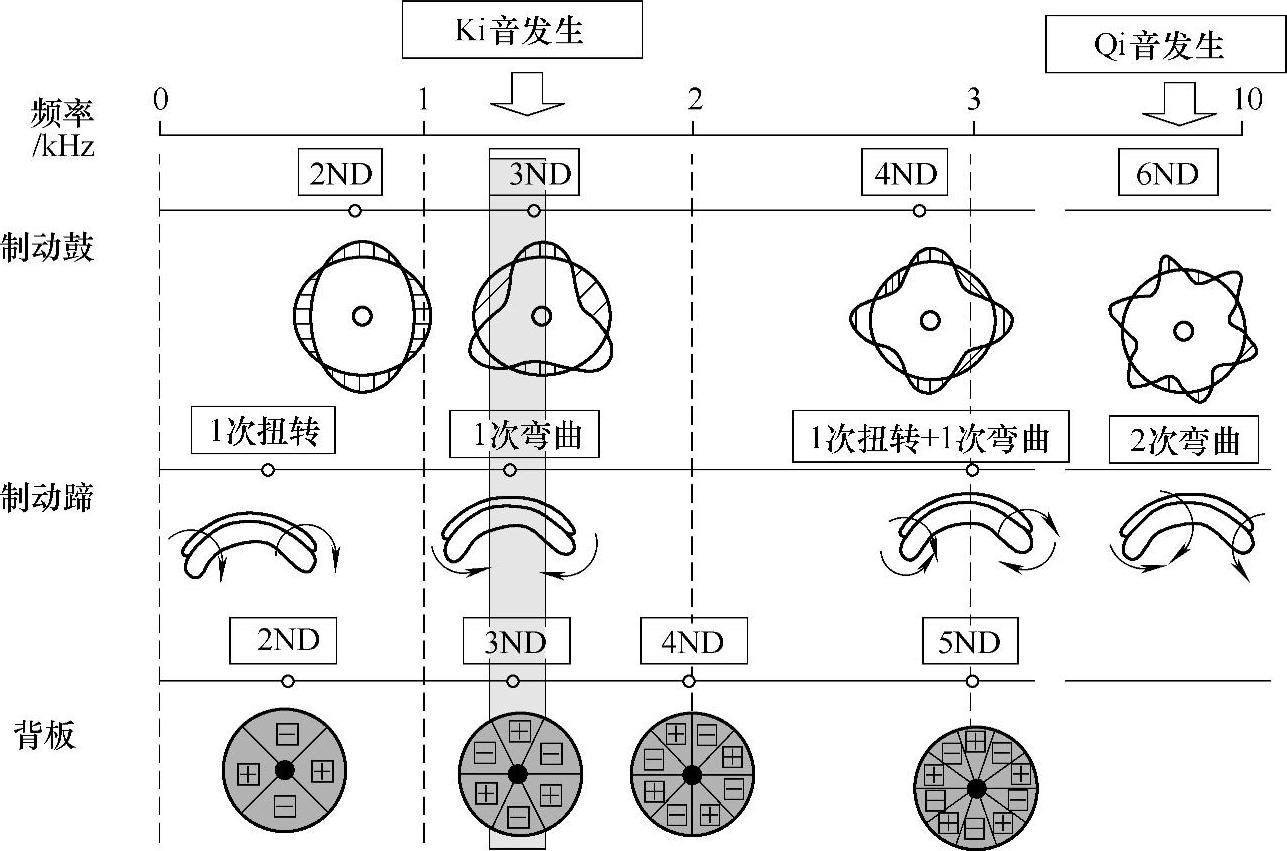
图11-11 制动系统模态分布
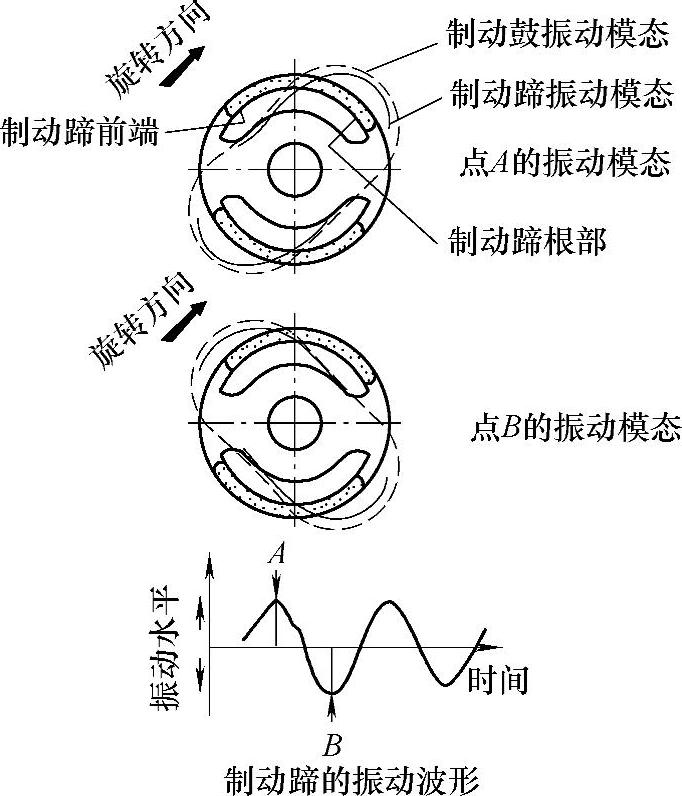
图11-12 制动鼓的径向弯曲模态
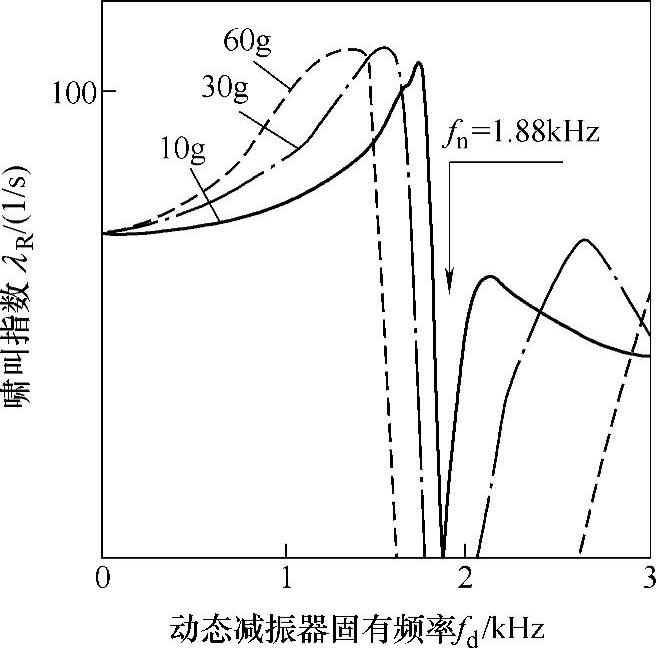
图11-13 动态减振器的效果
另外,和计算结果同样,动态减振器自身的减衰性能越小,则制振效果越好。这一点对于强迫振动来说,动态减振器的设计是完全不同的。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。