



交流调速理论、电力电子技术和功率半导体器件的发展,极大地推动了电力传动和新型逆变器技术的发展。在交流调速电梯的主驱动系统中,将采用PWM(脉冲编码调制)的矢量控制和直接转矩控制的方法用于交流高速电梯的主驱动控制系统。
交流调速中采用V/f比值恒定的控制方法,即在系统中通过控制输出电压幅值和输出频率值,使稳态情况下的磁通近似恒定,从而得到不同转速下的稳定运行。这种控制只与某一变量的幅值有关,或者说是控制该变量的直流值,因此又常称为标量控制。采用这种控制方法在低速及动态(如加速、减速)和加、减负载等情况时,系统表现出明显的缺陷。于是,人们开始想到使交流电动机某些变量的幅值和相位角都得到控制,这样就引出了矢量概念及矢量控制系统。事实证明,矢量控制不仅消除了标量控制的缺陷,而且大大提高了系统的控制性能,使交流电动机调速从简单的风机类型负载调速开始转为代替直流电动机调速,控制各种工艺情况下的负载。
20世纪70年代初期,P.C.Custman和西门子公司的F.Blaschke等一些学者提出了电动机坐标变换控制和磁场定向控制的概念,从而为交流电动机应用于高动态性能的应用领域提供了可能。这以后,经过20多年的发展,交流电动机的矢量控制系统逐渐走向实用,并逐步开始取代传统的直流控制系统。
目前,矢量控制系统一般都采用电流及速度闭环,以动态速降、恢复时间等作为指标。
电梯的交流调速矢量控制系统一般由电动机磁场检测、转矩电流调节环、励磁电流调节环、速度调节环、磁链调节环加上主回路及电动机构成,如图3⁃24所示。系统先从进线电压及电动机电流中计算出电动机正在运行的旋转磁链(如同上节对电动机数学模型的分析),以该磁链作复数参照系的实轴,观测出电动机实际运行所需转矩电流、励磁电流,再将磁链及转矩、励磁电流反馈给相应的调节环,构成一套完整的交流电动机速度调节系统。当然,实际系统可能要视电动机对象、动态指标等采用相应控制技术,因此系统构成可能更复杂些。(https://www.xing528.com)
由图3⁃24可以看出,矢量控制系统的构成基于电动机磁链的准确检测,只有测出磁链的运行状态,才可能形成实际控制所需要的磁场定向参照系,才可能对速度进行调节,并对磁链进行补偿。
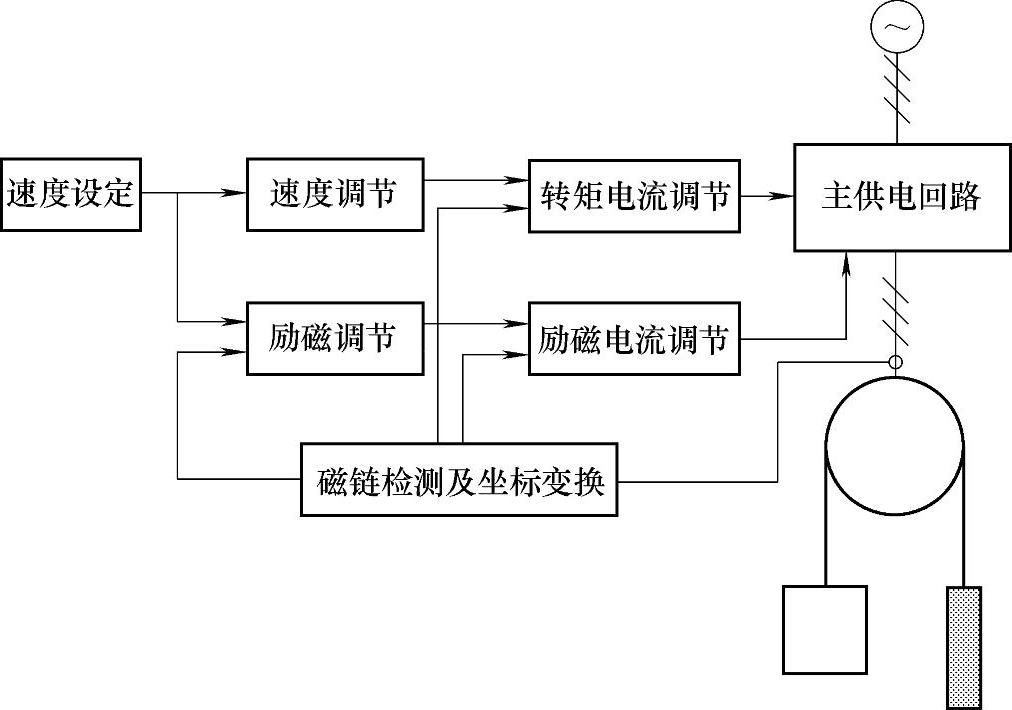
图3⁃24 交流电梯矢量控制系统框图
按照转子磁链位置角的不同求法,可以把异步电动机的矢量控制系统分为直接磁场定向控制和间接磁场定向控制,而间接磁场定向控制又称为前馈磁场定向控制。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。