



1.概述
随着汽车保有量的快速上升,在现在都市中“停车难”的问题越来越突出,由此引发的交通事故也逐年增加。一个有效的自动泊车系统,不仅能帮助驾驶人快速、安全地完成泊车操作,从而减轻驾驶人负担,减少交通事故,而且能够有效提高汽车的智能化程度,增加汽车的附加值,从而带来巨大的经济效益。
与前两代自动泊车辅助系统相比,第三代自动泊车辅助系统2.0首次安装在2011款途安上,系统中植入了一个主动的制动干涉,以避免在泊车过程中可能出现的车辆损坏。此外,该功能还能辅助车辆驶出平行停车位。
2.结构组成
大众途安自动泊车辅助系统的组成如图11-16所示。

图11-16 2011款途安自动泊车辅助系统
E266—泊车辅助系统按键 E581—自动泊车辅助系统按键 G203、G204、G205、G206、G716、G717—后部泊车辅助系统传感器 G252、G253、G254、G255、G568、G569—前部泊车辅助系统传感器 H15—后部泊车辅助系统警告蜂鸣器 H22—前部泊车辅助系统警告蜂鸣器 J791—自动泊车辅助系统控制单元 K136—泊车辅助系统指示灯 K241—自动泊车辅助系统指示灯
3.自动泊车系统电控原理
(1)基本原理 自动泊车系统可以使汽车自动地以正确的停靠位泊车,该系统包括环境数据采集系统、中央处理器和车辆策略控制系统。环境数据采集系统包括图像采集系统和车载距离探测系统,可采集图像数据及周围物体距车身的距离数据,并通过数据线传输给中央处理器;中央处理器可将采集到的数据分析处理后,得出汽车的当前位置、目标位置以及周围的环境参数,依据上述参数得出自动泊车策略,并将其转换成电信号;车辆策略控制系统接受电信号后,依据指令进行汽车的行驶如角度、方向及动力支援方面的操控。
1)泊车辅助/泊车转向辅助按钮。泊车辅助按钮E266用于开启前部停车距离控制(泊车辅助),如果停车距离控制因相关元件的技术故障而失效,则会通过警报灯闪烁进行报警提示。泊车转向辅助按钮E581用于激活泊车辅助的泊车转向功能。如果泊车辅助由于相关元件的技术故障而无法激活,则警报灯闪烁报警。
2)泊车辅助转向传感器。左前、右前泊车辅助转向传感器的信号是泊车辅助转向功能专用的,它们被用于测量可能的停车位,并且在泊车过程中监测前部末端的侧向空位,同时信号也被用于计算车辆驶过的角度。这两个传感器具有自诊断能力,如果该传感器有故障,泊车辅助转向功能(PA)将不能使用,但是泊车辅助功能(PDC)仍然有效。
3)泊车辅助传感器。泊车辅助传感器用于测量车辆与附近障碍物的距离,可用于泊车距离控制和泊车辅助转向。全部8个传感器都具有自诊断功能,若其中一个传感器失效将导致泊车辅助和泊车辅助转向功能均失效。
4)泊车辅助转向控制单元J791。J791位于转向柱的左侧,中央电器控制单元的上方,集成了泊车辅助转向功能和可视泊车辅助功能。也就是说,如果车辆装备了自动泊车辅助系统,则不必装备泊车辅助控制单元J446(用于可视泊车辅助)。如果车辆只装备J446,则无法实现泊车辅助转向功能。
(2)自动泊车系统工作过程 使用自动泊车辅助系统2.0倒车入位的过程可分为测量停车位长度阶段,启动自动泊车辅助系统阶段,自动泊车辅助系统帮助下进行泊车三个阶段。
1)测量停车位长度。自动泊车辅助系统在向驾驶人提供转向帮助之前,必须先对停车位进行测量,并识别车辆相对于停车位的位置。
即使自动泊车辅助系统2.0未开启,传感器(G568和G569)仍保持工作状态。这样的话,在车辆前行过程中,当车速低于40km/h(平行停车位)或低于20km/h(垂直停车位)时,两个位于车前端的传感器便会测量车两侧所有可停入的停车位。这两个传感器的探测范围在4.5m左右。
通过上述方法还能找到并识别出在转弯处或弯道上的停车位,与在笔直道路上没有差别。除车辆以外,系统还能识别到其他物体以及某一物体后的或是两个物体之间的停车位。如果没有识别出停车位前面较小的物体,当车辆靠近这些物体时,会由泊车距离控制系统发出警告音。
无论停车位在道路的左边还是右边,最后一个被测停车位的数据会临时存储在自动泊车辅助系统的控制单元中。当发现新的停车位或车辆已远离上一个停车位(驶离平行停车位超过15m,垂直停车位超过8m)时,关于上一个停车位的数据就会被删除。自动泊车辅助系统测量停车位的过程如图11-17所示。

图11-17 自动泊车辅助系统测量停车位
2)在道路右边测量停车位的过程
①未开启自动泊车辅助系统的车辆以低于20km/h的速度行驶(在本示例中的速度下,平行停车位和垂直停车位都能被找到)。
②停车位(A)将被暂存在控制单元中,如果此时驾驶人启动自动泊车辅助系统,就可进行泊车。
③停车位(A)仍存在控制单元中。
④下一个可用停车位(B)被测量并被暂时保存,停车位(A)被删除。
⑤驾驶人驶过停车位(B)并按下自动泊车辅助系统按键,停车位(B)被存入控制单元并立刻在组合仪表显示屏上显示出来。车辆所在位置不足以完成泊车。系统要求驾驶人继续向前行驶。
⑥平行与垂直停车位参数的确定
a.平行停车位参数如图11-18所示:测量停车位时,符合要求的平行停车位长度应大于车身长度加上机动距离与安全距离(前后至少各留有0.4m)。驶过停车位时的车速要低于40km/h。

图11-18 平行停车位参数
车辆的最佳起始位置应在平行停车位旁,处于行驶方向,且车辆侧面与已停放好的车辆之间的距离为0.5~2.0m。
b.垂直停车位参数如图11-19所示:测量停车位时,符合要求的垂直停车位长度应大于车身长度加上机动距离与安全距离(左右至少各留有0.35m)。驶过停车位时的车速要低于20km/h。
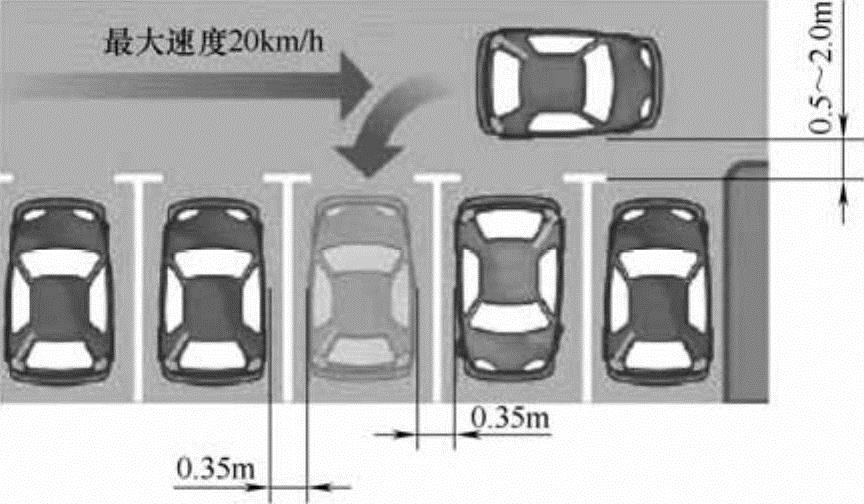
图11-19 垂直停车位参数
车辆所在的最佳位置应在垂直停车位旁,处于行驶方向,且车辆侧面与已停放好的车辆之间的距离为0.5~2.0m。
⑦测量停车位功能的关闭。当车速为40~50km/h(针对平行停车位)或20~50km(针对垂直停车位)时,自动泊车辅助系统切换至被动模式(待机模式),驾驶人可以在组合仪表显示屏上看到指示。当车辆速度再次低于40km/h或20km/h时,无需重新按键启动系统,传感器就会开启并开始探测停车位。
在车辆速度超过50km/h时,测量停车位的传感器会完全关闭,并且之前保存的数据会被删去。自动泊车辅助系统必须重新启动。
当车辆停止行驶超过30s时,传感器也会暂时关闭。一旦车辆再次起动,传感器会重新启动。
⑧以下因素会影响停车位的识别的参数:界定停车位的物体类型(汽车、树、摩托车等),停车位的长度与深度路沿,车辆经过停车位时的速度,天气情况(如下雪、冰冻、暴雨、暴风等),地面情况(落叶、井盖、碎石路面等)。
(3)启动自动泊车辅助系统每次进行泊车过程前都需要通过按键E581来启动自动泊车辅助系统。亮起的自动泊车辅助系统指示灯K241表示系统已开启,如图11-20所示。
组合仪表显示器上可能会显示已存在存储器里的停车位,也可能还未确认和保存任何停车位。然后就会要求驾驶人继续行驶。

图11-20 按键E581
根据按键次数的不同,可以在要进行泊车时选择以下不同的功能:(https://www.xing528.com)
第1次按键:开启自动泊车辅助系统,并自动在显示屏上显示车辆右侧的平行停车位。
第2次按键:自动在显示屏上显示车辆右侧的垂直停车位。
第3次按键:关闭自动泊车辅助系统。
注意事项:如果驾驶人想在道路左侧泊车,只需在按下自动泊车辅助系统按键后,打开左转向灯来进行切换。
原则上自动泊车辅助系统默认左置转向盘车辆应在道路右侧停泊。在这种情况下驾驶人不需要给予车辆其他指令(右置转向盘车辆默认应在道路的左侧停泊)。
(4)在自动泊车辅助系统帮助下进行泊车 在测量到合适的停车位且确定车辆位置恰当后,便可以开始进行泊车。在驾驶人开始进行自动泊车之前,必须先挂入倒档,并在静止约0.5s后开动车辆。静止时间是指从挂入倒档后到车辆真正开动的时间。在这段时间里,所有相关系统都会启动,并开始计算行驶路线。在自动泊车过程中无需驾驶人操控转向盘。由自动泊车辅助系统来控制对方向的操作,并按照计算好的行驶路线驶入停车位。在多次移车入位的过程中,驾驶人可以在组合仪表显示屏上看到前行或后退的操作提示。位于后部的两个轮速传感器G44和G46可以识别车辆是在前行还是后退。
此外,在倒车过程中还将额外用到8个泊车辅助系统传感器(4前4后)和4个侧面自动泊车辅助系统传感器(2前2后)来监控距离。当泊车过程结束后,组合仪表显示屏会提示自动转向辅助已完成。
如果在自动泊车过程中识别到车辆所处位置有危险情况,或驾驶人介入了转向盘控制,自动泊车就会中止。
1)泊入平行停车位。驾驶人按下自动泊车辅助系统键选择平行泊车功能。相应的图示会显示在组合仪表显示屏上。平行泊车可以通过多次移位完成。
泊车时,从泊车起始位置到进入停车位前的最高车速为9km/h(直线行驶)。
在驶入停车位的过程中,最大速度为7km/h(在转向盘转动后),如图11-21所示。

图11-21 泊入平行停车位
2)泊入障碍物之间。自动泊车辅助系统2.0不仅能识别车辆,还可以识别其他物体。系统可以对如房屋墙面、围墙或路沿等进行定位。另外它还可以帮助驾驶人在如树木、垃圾桶、灌木丛或摩托车等障碍物间泊车。
如果识别到路沿,则会在距离路沿边缘15cm处以“通过路沿定位”的方式进行泊车。
如果识别不到路沿,则会将车辆与停泊在障碍物前的其他车辆停成一排,如图11-22所示。
3)部分或全部泊在路沿上。系统首先识别出路沿的边缘以及车辆与路沿边缘之间的距离。此外还要测量其他停着的车辆或物体,以此得出停车位的长度与深度。
在泊车过程中,系统总是以其他车辆的位置为基准(通过车辆定位)。如果停着的车辆有部分停泊在路沿上,那么待泊车辆也可部分停泊在路沿上。如果两辆车的停泊方式不同,如一辆车部分停泊在行车道上,而另一辆车则全部停泊在人行道上,那么待泊车辆就与停在前面的车辆同排停泊,如图11-23所示。

图11-22 泊入障碍物之间
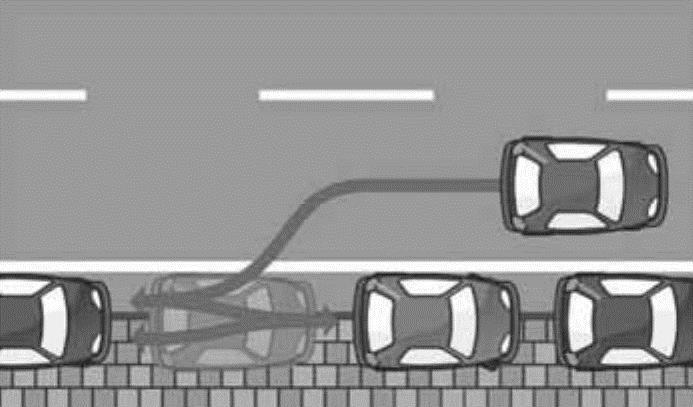
图11-23 部分或全部泊在路沿上
4)弯道泊车。系统还可以辅助在弯道上进行泊车。
在其他条件不变的情况下,系统可在半径超过20m的曲折道路上或弯道上识别出停车位,过程与在直路上没有区别。
弯道的半径关系到行驶路线和最终停泊位置的计算,如图11-24所示。
5)泊入垂直停车位。驾驶人通过自动泊车辅助系统按键,选择垂直泊车功能。相应的图示会在组合仪表显示屏上显示出来。垂直泊车过程可以通过多次移位来完成。为使两侧车门可以相同程度打开,系统会控制车辆停在车位的正中间,如图11-25所示。
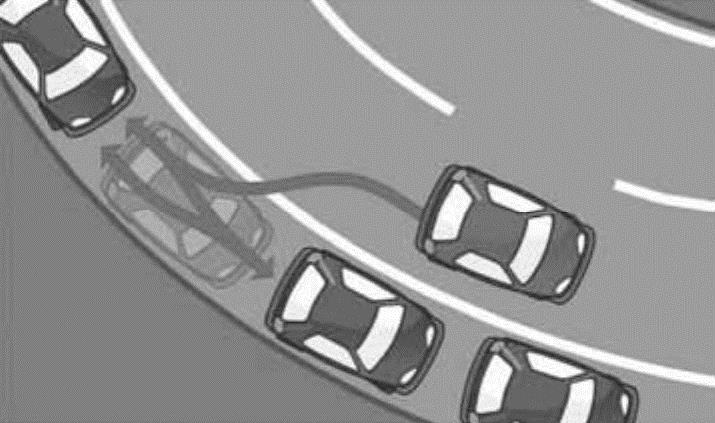
图11-24 弯道泊车

图11-25 泊入垂直停车位
位于车辆后侧的传感器G716和G717就是主要用来控制车辆,使其位于停车位的中间的,这两个传感器的探测范围与其他用来感应障碍物的传感器一致。
从泊车起始位置到进入停车位前的最高车速为9km/h(直线行驶),在驶入停车位的过程中,最高车速为7km/h(在转向盘转动后)。
(5)系统限制 测量停车位以及之后的泊车过程可能会因为环境因素而受到影响。例如,系统不能识别如下物体:井盖、凹陷或松散的路肩、停车位上较小的物体。
超声波传感器的物理特性可能会受一些因素的影响,如:
1)传感器脏污。
2)传感器薄膜上有雨滴。
3)传感器上有冰雪。
4)大雨或大雪天气。
5)大风天气。
当出现系统故障或物理故障时,组合仪表显示屏上会出现提示。这些限制表明自动泊车辅助系统不能代替驾驶人的观察判断,驾驶人须承担全部责任。
如果树叶、垃圾或积雪覆盖在路沿上,会加大自动泊车辅助系统辨识的难度。这是因为树叶或积雪对超声波信号的反射有较强的影响,会导致自动泊车辅助系统接收不到返回的超声波信号,造成系统运行错误。
另一个关于系统限制的例子是在岔路口或建筑物入口处,系统可能会误将附近大门关闭
的庭院入口视为理想的停车位。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。