



1.数据传输
1)最大传输速率20kbit/s。LIN控制单元将数据传输速率限制在1~20kbit/s之间,相当于舒适CAN网络传输速率的五分之一,如图4-15所示。
2)信号波形。如图4-16所示,波峰表示在LIN数据网络无信息传输或者是高电平信号时,LIN网络上的电压相当于蓄电池电压。波谷表示LIN网络上有低电平信号,由控制单元内的转换器控制LIN数据总线搭铁。不同的控制单元由于转换器的设计不同,高电平的具体电压数值也不同。
图4-15 LIN主机、从机之间的数据传输
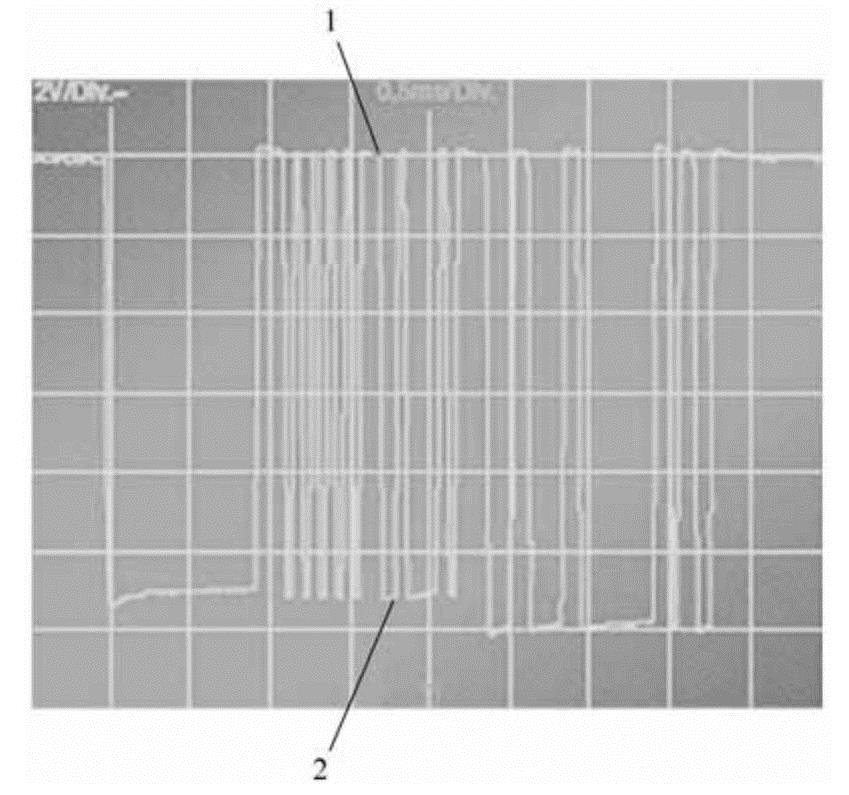
图4-16 LIN总线信号波形图
1—波峰或者叫高电平 2—波谷或者叫低电平
3)信号电压阈值。如图4-17、图4-18所示,高电平与低电平都有一定的阈值,这样可以保证数据传输的稳定性。考虑到有外界干扰,为了获得有效信号,接收端认可的电压范围要略宽一些。
2.主机指令信号
借助指令信号里的识别段,LIN主机要求相应的LIN从机处理其发出的信号里面包含的任务。反应信号由LIN主机发出。
指令由LIN主机往复循环得发出,如图4-19所示,可以划分为4段:同步间隔域、同步定界、同步域、识别域4个域。
(1)同步间隔域 同步间隔域是一段至少有13B长度的低电平域。独一无二的13B长度对于所有的LIN从机来说,就预示着来自LIN主机的信息紧随其后。而其他信息的低电平域长度至多9B。
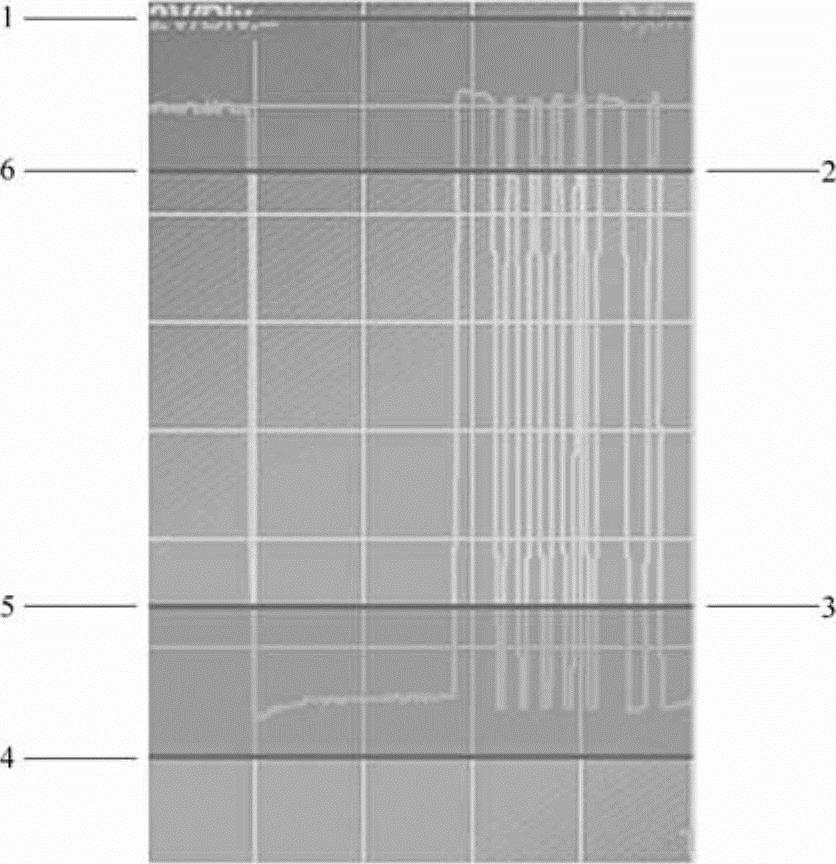
图4-17 信号电压阈值示意图
1—蓄电池电压 2—80%蓄电池电压 3—20%蓄电池电压 4—蓄电池负极电压 5—低电平极大值 6—高电平极小值
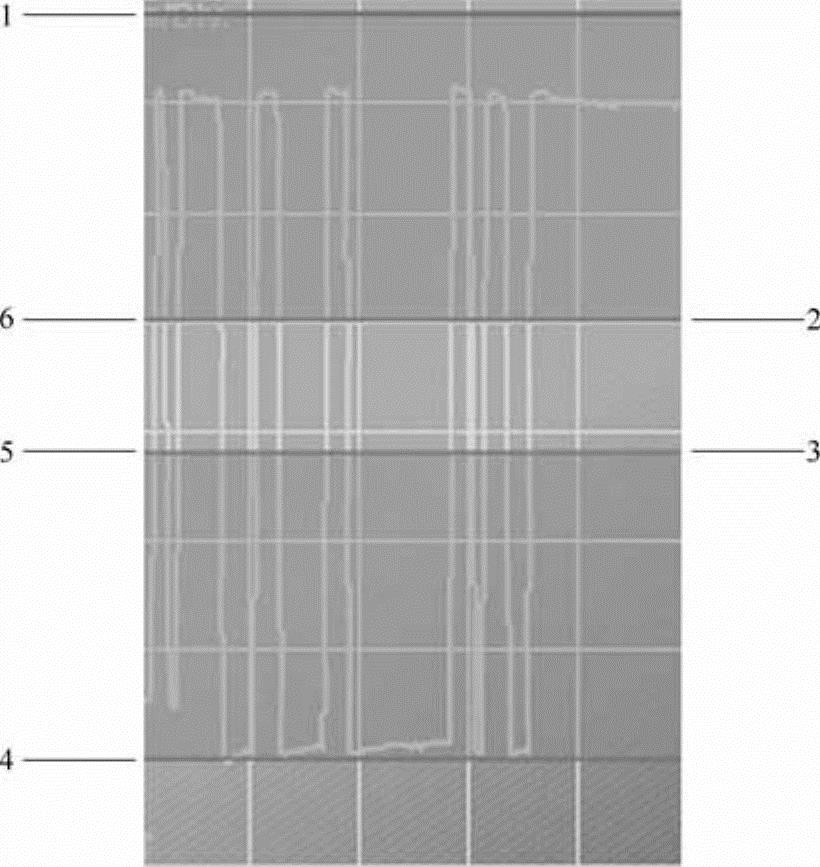
图4-18 信号电压接受范围
1—蓄电池电压 2—60%蓄电池电压 3—40%蓄电池电压 4—蓄电池负极电压 5—低电平极大值 6—高电平极小值
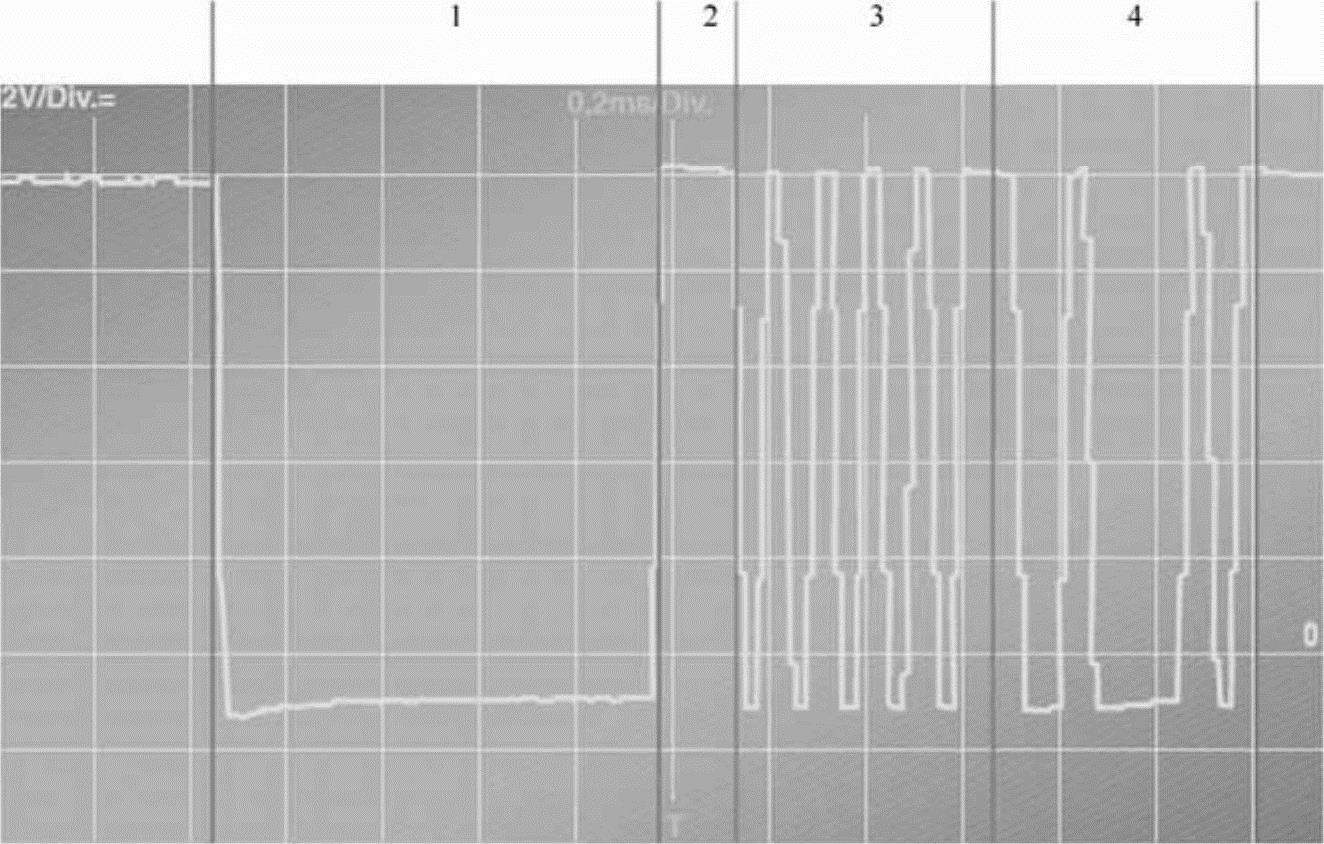
图4-19 主机指令信号组成
1—同步间隔域(Synch Break) 2—同步定界(Synch Delimeter) 3—同步域(Synch Field) 4—识别域(Identifier Field)
(2)同步定界 同步定界是一个至少1B长度的高电平(蓄电池电压)。
(3)同步域 同步域有一定的字节顺序0101010101。同步域可以实现所有的LIN从机的系统时钟与LIN主机的系统时间同步。所有控制单元时钟同步对于进行准确的信息交换相当关键。如果不同步,那么接收信息的模块就会将字节值插入到不正确的位置。数据传输就会发生错误。(https://www.xing528.com)
(4)识别域 识别域也有8B的长度。起始的6B包含身份信息以及反应数据域的数量。反应数据域的数量为0~8个。末尾两个字节包含了前6B传输错误的检验码。如果识别域传输错误的话,检验码可以用来阻止不正确信息的发出。
3.从机反应信号
如图4-20所示,LIN从机对主机的询问作出回应时,将会发出带有识别域的信息。在LIN主机再次发出指令数据中,包含识别域与应答信息。相应的LIN从机处理这些信息后,执行相应的功能。

图4-20 LIN主机对从机的问询
1—空调器操作显示单元 2—前风窗加热 3—鼓风机实际转速信号 4—速度信号(150r/min) 5—LIN主机对鼓风机转速的询问
如图4-21所示,应答域一般包括1~8个数据块。每个数据块由10个字位组成,包含一个低电平起始位,一个数字字节和一个高电平终止位。起始与终止位用来进行后同步以避免传输错误的产生。
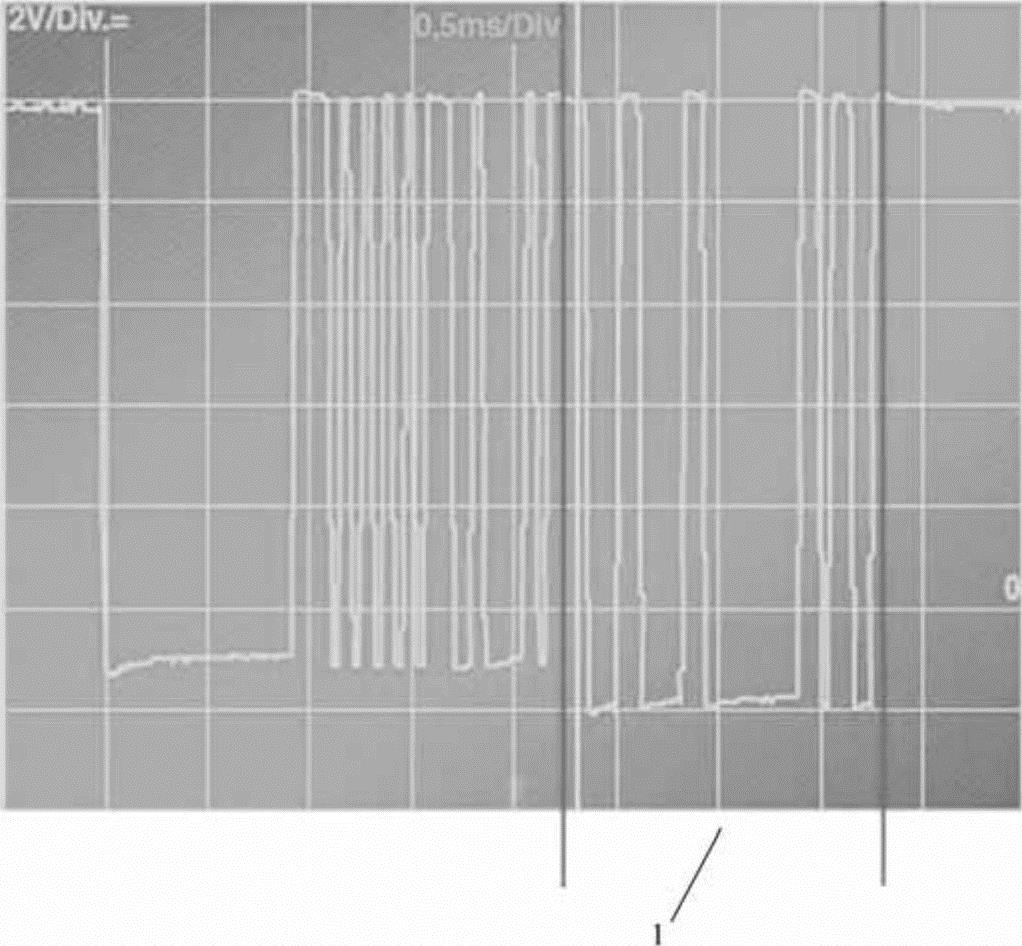
图4-21 应答域
1—应答域
4.信息的排列
如图4-22所示,LIN主机发出主机信息时,按照内部预设的程序,循环往复地发出指令与应答信号。一般地,主机需要的信息会被要求发送几次。影响主机的状态会改变信息发送的次序。
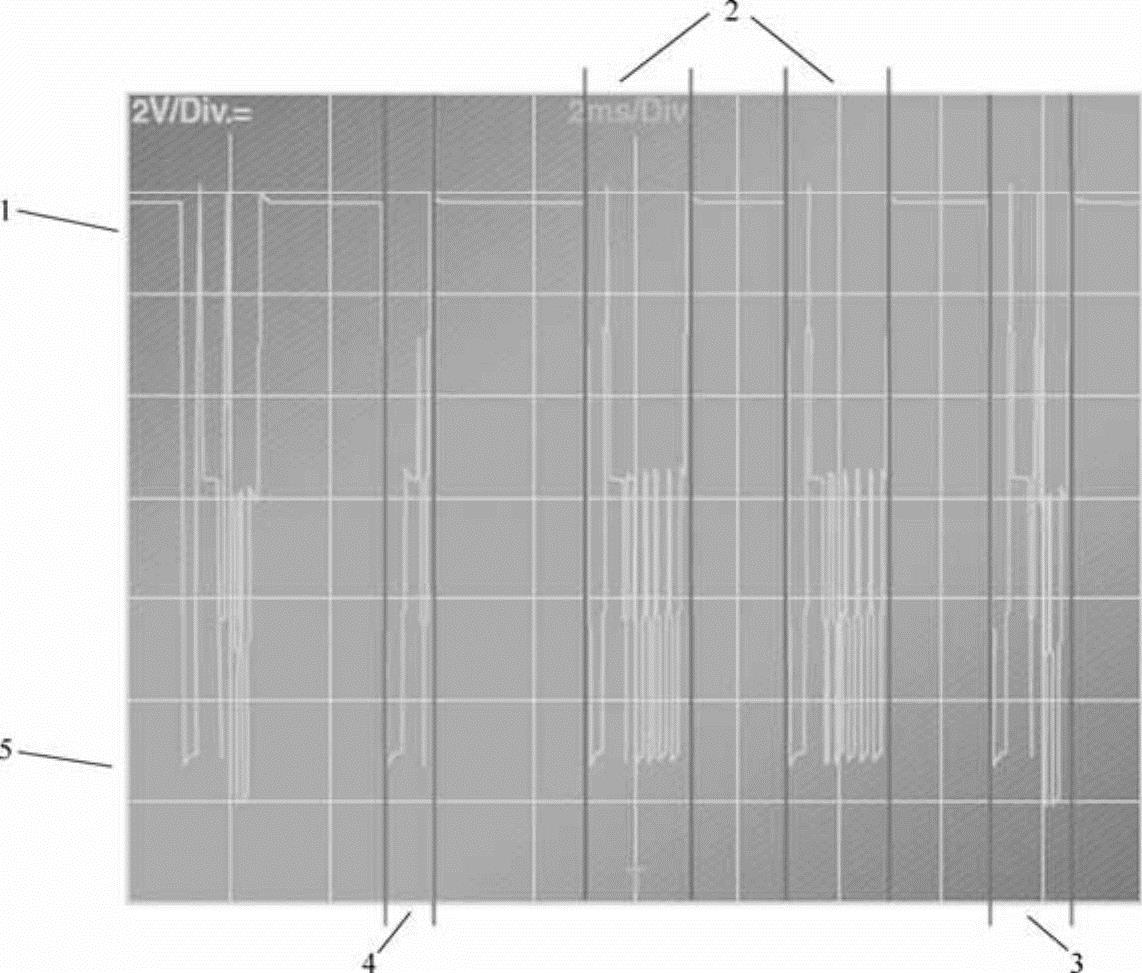
图4-22 信息的排列
1—高电平 2—主机信息 3—从机信息(低电平水平不同) 4—无应答的空指令 5—低电平
为降低LIN主机的元件选项,主机发出的指令是针对一台配置全部功能的车辆的,如果某些功能在该车上没有选配,那么在波形图上显示的指令将不带有应答信息。这对整个系统的运行并无影响。

图4-23 LIN总线应用——防盗系统
1—中控门锁 2—车辆电气系统 3—系统外操作 4—笔记本 5—车库门自动开启控制单元 6—来自笔记本的数据(不被接受) 7—中控门锁控制单元
5.LIN总线应用——防盗系统
如图4-23所示,只有主机发出的带有正确识别域的指令才会被LIN总线系统接收。LIN主机特有的监控LIN网络内信息传输的功能将拒绝来自LIN网络以外的操纵信号。LIN从机只有执行而无发出指令的功能。比如说,LIN网络无法打开位于CAN网络上的中控门锁。
这种指令不能逆向发送的方式使得LIN从机可以在车辆的外部可以放心使用,如位于车辆前保险杠的车库门自动开启控制单元。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。