



车载控制子系统采用预存车载线路数据的模式,通过预先将站点信息、距离信息、限速信息和须报警点位置等数据按照特定的格式,编制成车载线路数据文件,并将线路数据文件存储在车载主机中,车载主机可以方便地读取并解析线路数据。在有轨电车运行过程中,车载主机实时读取线路数据,并综合速度传感器和卫星定位设备获取的定位数据,从而实现列车定位及限速报警等功能。
车载控制子系统与调度指挥中心子系统的通信采用专用无线通信网络通信方式。每一套车载主机有唯一的标识符,当有轨电车开始运营时,主动发送到控制中心完成“注册”。控制中心根据注册的车载主机标识符发布调度指令,包括分配有轨电车识别号、更改有轨电车识别号等信息。车载主机实时采集行车数据,进行综合分析后发送给控制中心,辅助控制中心完成行车状态监视。车载主机将速度、位置及控制中心发送的正点时刻、与前车距离等信息通过车载显示器实时显示,实现辅助驾驶员驾驶的功能。
车载控制子系统与正线道岔控制子系统采用车-地信息传输系统完成车-地通信,实现对道岔的控制。道岔控制包括自动控制和人工控制两种模式。有轨电车在行驶过程中,车载主机持续地通过车载天线向外发送车次号、进路号等信息。当有轨电车处于地面通信设备上方时,车-地信息传输建立,道岔控制子系统根据接收的车次号、进路号信息自动控制道岔动作,完成道岔自动控制。当驾驶员需要手动控制道岔时,会通过驾驶台的操作按钮来实现。车载主机采集驾驶员操作按钮的信息,发送驾驶员遥控道岔请求,正线道岔控制子系统收到命令后,完成道岔的控制。
通过路口时,车载主机发送信号优先请求及有轨电车方向请求给平交道口信号控制子系统,实现自动路口优先控制功能。车载主机采集驾驶员操作按钮信息,发送信号优先请求及有轨电车方向请求给平交道口信号控制子系统,实现手动路口优先控制功能。
车-地通信系统是联系车载运行控制与调度指挥控制的纽带,主要负责有轨电车安全间隔划分、状态及命令信息的转发。
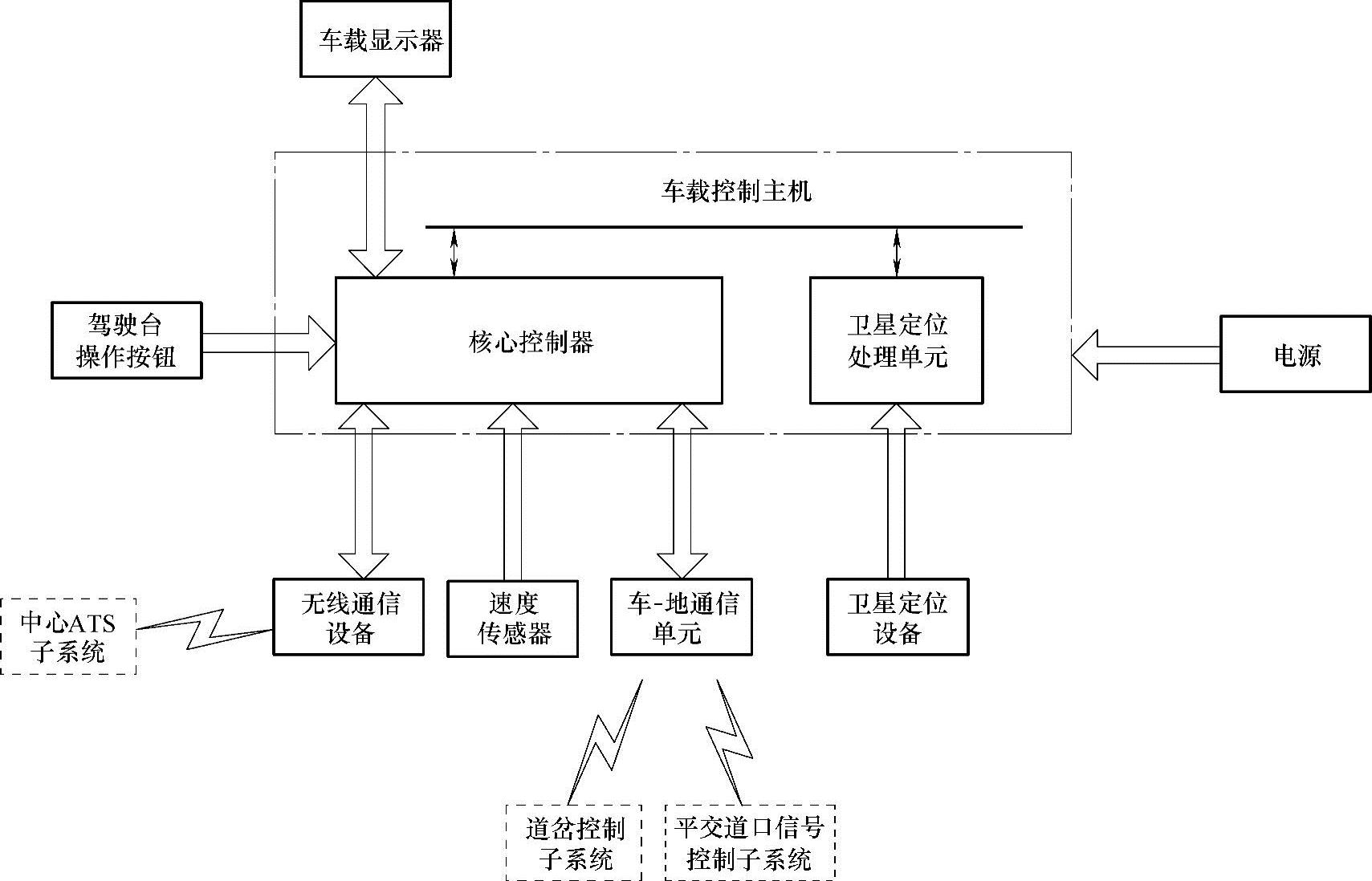
车载控制子系统的结构框图如图4-14所示。
1.正线有轨电车定位技术
有轨电车的定位可以利用GPS/北斗卫星、无线、地面应答器、速度传感器、地面信息环路、计轴器以及铁路传统的轨道电路等多种方式来实现。线路电子地图可存储于控制中心数据库服务器;对于基本无遮挡物的线路,系统可利用卫星信号结合读取线路上的电子标签(RFID)来实现有轨电车的位置校准;对于遮挡物较多或隧道较长的线路,有轨电车车载设备可通过读取线路上的RFID实现定位。当然也可结合具体有轨电车运行线路的状况,综合利用多种定位手段,实现实时和精确的定位。
利用GPS实现列车定位已是一种比较成熟的技术。GPS由导航卫星、地面检测站和用户接收机组成。只要在列车两端安装GPS接收机和差分误差信息接收器,接收多颗导航定位卫星发送来的定位信息,就可以计算出确切的位置,从而通过导航卫星实现列车的精确定位。GPS定位方法的优点是定位精度高,实现连续定位,对于用户来说没有地面设备,节约了大量的安装和维护工作。
现代有轨电车采用的定位方式一般是通过GPS信号和电子标签校准有机结合而实现的。
 (https://www.xing528.com)
(https://www.xing528.com)
图4-14 车载控制子系统的结构框图
1)线路电子地图可存储于控制中心数据库服务器。
2)对于基本无遮挡物的线路,系统可利用卫星信号结合读取线路上的RFID实现有轨电车的位置校准。
3)对于遮挡物较多或隧道较长线路,有轨电车车载设备可通过读取线路上的RFID实现定位。
实现有轨电车智能化运营,达到以人为本的设计理念,逐步实现有轨电车信息完全监控,是我国有轨电车系统运用和管理的发展趋势。现代智能化有轨电车具有较完整的信号系统结构。
2.车-地信息传输
现代有轨电车信号系统车-地信息传输的结构如图4-15所示。
有轨电车信号系统中的车-地信息传输主要是通过车-地双向无线通信网络来实现的。车-地无线通信网络采用4G长期演进(LTE)技术,通过采用基于LTE技术的超大带宽传输平台,建立无线通信专用网络系统,可为车-地双向无线传输系统提供无线信息传输载体,实现车-地双向无线信息的传输;LTE技术还可以为地面系统和车载系统的信息交互提供准确及时的传输服务。并且,利用完善的IP传输机制和多种服务质量(QoS)保证传输QoS目标,实现差异化服务、保证优先级最高的业务在网络出现堵塞时能够优先传输到达目的地,不会造成中断或数据丢失的现象。LTE技术的应用将使车-地信息传输的通信信号技术趋于一体,最终使通信信号一体化的实现成为可能。
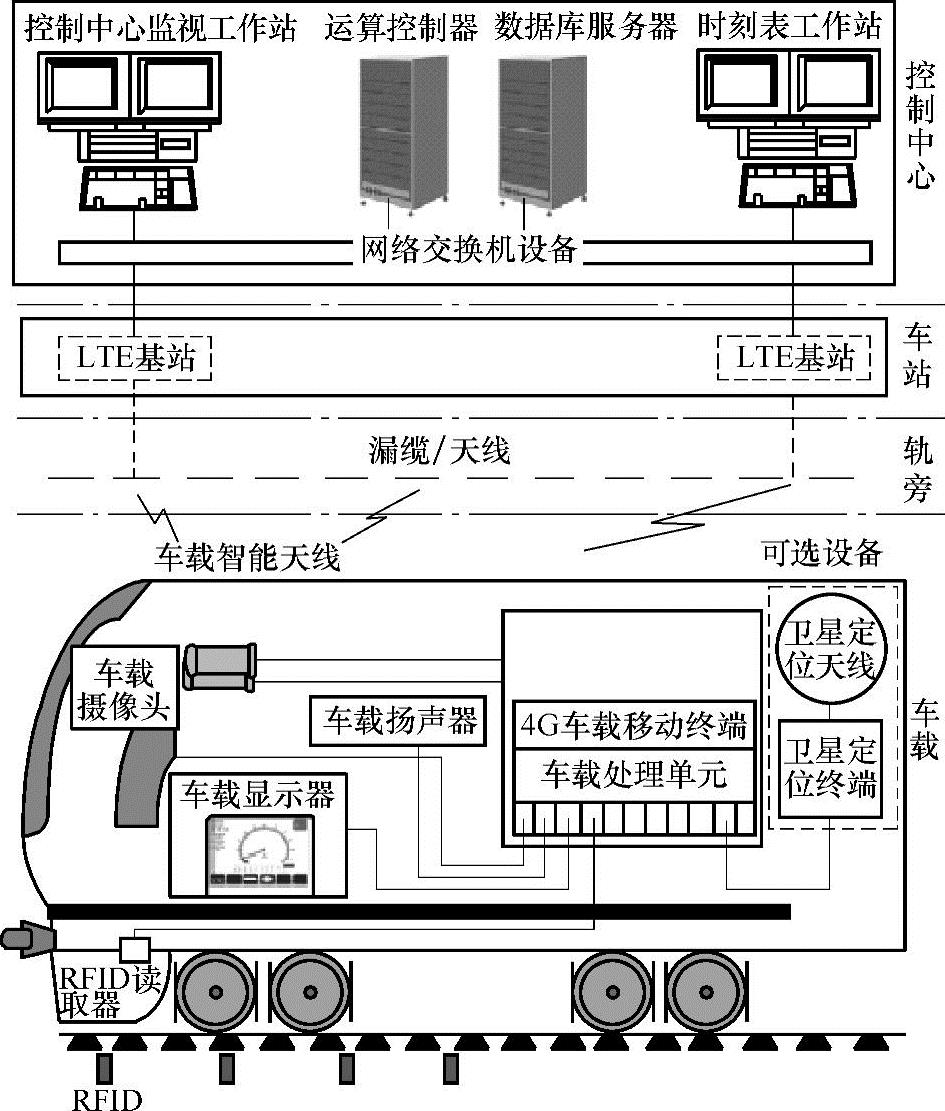
图4-15 现代有轨电车信号系统车-地信息传输的结构
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。