



1.有轨电车速度防护
有轨电车速度防护接收来自测速、定位装置的信息和来自地面的最高速度命令,一旦当有轨电车实时速度大于最高允许速度,该功能将启动紧急制动。有轨电车最高速度命令可直接来自于地面速度命令,也可根据地面命令自动生成:
1)通过地面信息得到前方的停车点或限速点。
2)车载设备根据列车当前的位置可以计算出前方停车点或限速点的实际距离,并以此点为基点,从车载设备存储的固定信息里,提取出这段距离的坡道值、弯道值、线路的最高限速,结合车载设备存储的列车性能参数(如制动率、空走时间、列车阻力等),利用公式计算出有轨电车当前位置到目标点的速度—距离监督曲线。
3)当存在多个目标点时,对每个目标点都要进行计算,采用速度限制最小的一个作为控制依据。
有轨电车的列车超速防护(ATP)系统是列车运行自动控制(ATC)系统的核心组成部分。ATP主要负责列车的安全运行,其主要功能为安全性停车点的防护、速度监控和超速防护、测速和测距及门控等。通常,有轨电车可采用基于数字化无绝缘轨道电路的列车超速防护(ATP)系统或点式ATP系统。
基于数字化无绝缘轨道电路的列车超速防护系统由控制中心、车载设备、轨旁设备和车站设备等组成,该系统采用连续式速度控制模式,使同一线路上运行的有轨电车能够以2min的最小追踪间隔安全运行;点式ATP系统主要由地面应答器、轨旁电子单元(LEU)、车载设备和列车占用检查(计轴器或轨道电路)设备组成,该系统在功能上能够满足非大运量城市轨道交通的需求,且建设成本低、施工简单,系统管理运行也较简单。
2.车门监督
车门监督包含两层含义:①列车移动时,禁止打开车门。②在车站站台,只能打开站台一侧的车门。其主要功能是检测有轨电车即时速度值和车门状态。当有轨电车在移动时,如果检测到车门已打开,则车载设备应给出制动命令,输入输出子系统的允许开单侧门命令的硬件执行电路是故障导向安全的,即当电路发生故障时,能够保证输出禁止开门命令,并断开安全输出控制,从而切断输出电路的电源,保证安全。在监控模式下,当列车在站台停稳时,主机系统才能给出打开一侧车门的命令。在限速模式下,只要列车速度为零速,就可以打开车门。
3.测速定位
有轨电车测速定位功能可以安全准确地确定有轨电车的相对位置和速度。其有轨电车定位与测速功能模块主要包括了有轨电车定位测试控制和安全定位测速。车载控制子系统可结合各道岔区的车-地双向通信设备及平交道口的路口检测设备(采用车-地双向通信设备)进行有轨电车定位数据校准,同时满足在丢失某个定位信息时不对有轨电车运行造成影响。(https://www.xing528.com)
4.辅助驾驶
车载控制子系统在车载显示器上显示速度、与前车距离、前方到站、当前时刻,前方到站正点时刻以及报警信息等内容,能帮助驾驶员更好地掌握行车状态。车载控制子系统能接收驾驶台操作按钮指令信息,根据指令信息类型,分别将指令信息发送给正线道岔控制子系统、调度指挥中心子系统或平交道口信号控制子系统,辅助驾驶员更好地完成驾驶。
5.限速区段提示
车载控制子系统内置有线路数据库,包含固定限速、临时限速等数据,因此车载控制子系统具备平交道口、岔区及转弯等固定位置限速提醒功能。
6.遥控道岔
车载控制子系统对道岔的控制是通过与正线道岔控制子系统的通信实现的。车载控制子系统与正线道岔控制子系统通过车-地信息传输系统交互进路号、车次号以及驾驶员遥控道岔请求等数据。车载控制子系统共有两种方式参与实现对道岔的控制,分别为自动模式和手动模式。在自动模式下,车载控制子系统发送进路号及车次号给正线道岔控制子系统,实现道岔自动控制;在手动模式下,车载控制子系统接收驾驶员在操作台的操作信息,发送驾驶员遥控道岔请求给道岔控制子系统,实现道岔手动控制。
7.防冒进报警
道岔区防冒进报警功能是通过车载控制子系统与正线道岔控制器间的车-地双向专用通信来实现的。当道岔区防护信号显示为禁止通过信号时,正线道岔控制器通过地向车的车-地通信环线传输信号禁止信息,车载控制子系统据此提前给出声光报警,提示驾驶员防止冒进。通过道岔控制器对区段占用状态的检测,当出现冒进信号后,控制中心能收到道岔控制器的信息,实现报警功能。如图4-13所示。
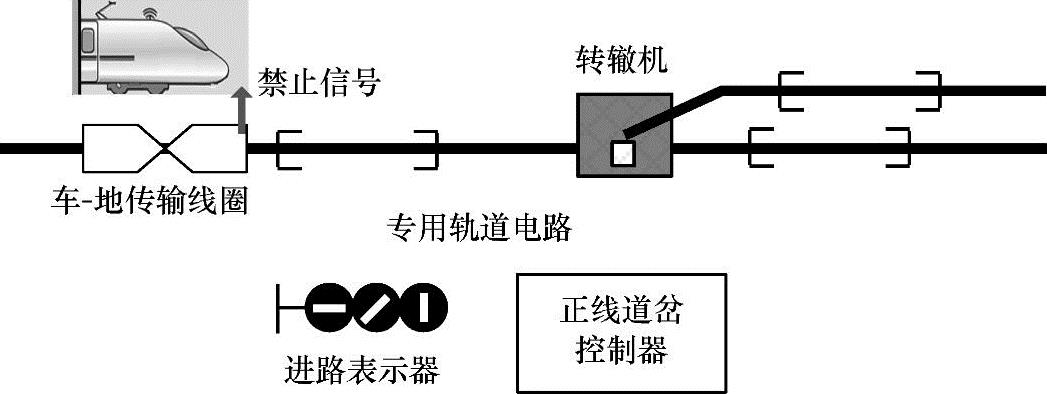
图4-13 防冒进报警
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。